UVA12569-Planning mobile robot on Tree (EASY Version)(BFS+状态压缩)
Problem UVA12569-Planning mobile robot on Tree (EASY Version)
Accept:138 Submit:686
Time Limit: 3000 mSec
 Problem Description
Problem Description
Input
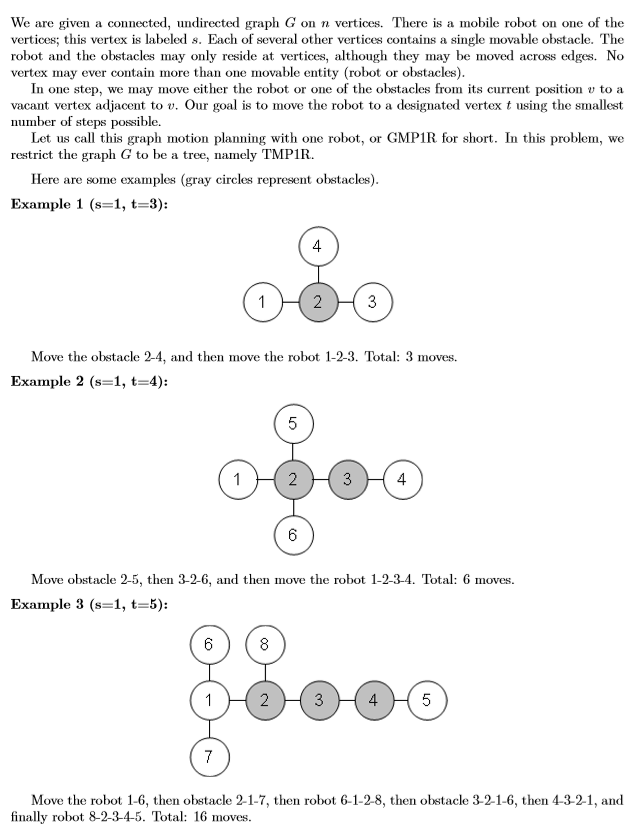
The first line contains the number of test cases T (T ≤ 340). Each test case begins with four integers n, m, s, t (4 ≤ n ≤ 15, 0 ≤ m ≤ n−2, 1 ≤ s,t ≤ n, s ̸= t), the number of vertices, the number of obstacles and the label of the source and target. Vertices are numbered 1 to n. The next line contains m different integers not equal to s, the vertices containing obstacles. Each of the next n − 1 lines contains two integers u and v (1 ≤ u < v ≤ n), that means there is an edge u−v in the tree.
Output
For each test case, print the minimum number of moves k in the first line. Each of the next k lines containstwointegers a and b,thatmeanstomovetherobot/obstaclefrom a to b. Ifthereisnosolution, print ‘-1’. If there are multiple solutions, any will do. Print a blank line after each test case.
Sample Input
4 1 1 3
2
1 2
2 3
2 4
6 2 1 4
2 3
1 2
2 3
3 4
2 5
2 6
8 3 1 5
2 3 4
1 2
2 3
3 4
4 5
1 6
1 7
2 8
Sample Ouput
2 4
1 2
2 3
2 6
3 2
2 5
1 2
2 3
3 4
1 7
2 1
1 6
7 1
1 2
2 8
3 2
2 1
1 7
4 3
3 2
2 1
8 2
2 3
3 4
4 5
- #include <bits/stdc++.h>
- using namespace std;
- const int maxn = ;
- int n, m, s, t;
- int ori;
- struct Edge {
- int to, next;
- }edge[maxn << ];
- struct Node {
- int sit, robot;
- int time;
- Node(int sit = , int robot = , int time = ) :
- sit(sit), robot(robot), time(time) {}
- };
- int tot, head[maxn];
- pair<int,int> pre[][maxn];
- bool vis[][maxn];
- void init() {
- tot = ;
- memset(head, -, sizeof(head));
- memset(pre, -, sizeof(pre));
- memset(vis, false, sizeof(vis));
- }
- void AddEdge(int u, int v) {
- edge[tot].to = v;
- edge[tot].next = head[u];
- head[u] = tot++;
- }
- inline int get_pos(int x) {
- return << x;
- }
- int bfs(pair<int,int> &res) {
- queue<Node> que;
- que.push(Node(ori, s, ));
- vis[ori][s] = true;
- while (!que.empty()) {
- Node first = que.front();
- que.pop();
- if (first.robot == t) {
- res.first = first.sit, res.second = first.robot;
- return first.time;
- }
- int ssit = first.sit, rrob = first.robot;
- //printf("%d %d\n", ssit, rrob);
- for (int i = head[rrob]; i != -; i = edge[i].next) {
- int v = edge[i].to;
- if (ssit&get_pos(v) || vis[ssit][v]) continue;
- vis[ssit][v] = true;
- que.push(Node(ssit, v, first.time + ));
- pre[ssit][v] = make_pair(ssit, rrob);
- }
- for (int i = ; i < n; i++) {
- if (ssit&(get_pos(i))) {
- for (int j = head[i]; j != -; j = edge[j].next) {
- int v = edge[j].to;
- if (v == rrob || (ssit & get_pos(v))) continue;
- int tmp = ssit ^ get_pos(v);
- tmp ^= get_pos(i);
- if (vis[tmp][rrob]) continue;
- vis[tmp][rrob] = true;
- que.push(Node(tmp, rrob, first.time + ));
- pre[tmp][rrob] = make_pair(ssit, rrob);
- }
- }
- }
- }
- return -;
- }
- void output(pair<int,int> a) {
- if (a.first == ori && a.second == s) return;
- output(pre[a.first][a.second]);
- int ppre = pre[a.first][a.second].first, now = a.first;
- if (ppre^now) {
- int b = -, c = -;
- for (int i = ; i < n; i++) {
- if (((ppre & ( << i)) == ( << i)) && ((now & ( << i)) == )) {
- b = i;
- }
- else if (((ppre & ( << i)) == ) && ((now & ( << i)) == ( << i))) {
- c = i;
- }
- }
- printf("%d %d\n", b + , c + );
- }
- else {
- printf("%d %d\n", pre[a.first][a.second].second + , a.second + );
- }
- }
- int con = ;
- int main()
- {
- int iCase;
- scanf("%d", &iCase);
- while (iCase--) {
- init();
- scanf("%d%d%d%d", &n, &m, &s, &t);
- s--, t--;
- ori = ;
- int x;
- for (int i = ; i <= m; i++) {
- scanf("%d", &x);
- x--;
- ori ^= get_pos(x);
- }
- int u, v;
- for (int i = ; i <= n - ; i++) {
- scanf("%d%d", &u, &v);
- u--, v--;
- AddEdge(u, v);
- AddEdge(v, u);
- }
- pair<int, int> res;
- int ans = bfs(res);
- printf("Case %d: %d\n", con++, ans);
- if (ans != -) output(res);
- printf("\n");
- }
- return ;
- }
UVA12569-Planning mobile robot on Tree (EASY Version)(BFS+状态压缩)的更多相关文章
- UVA-12569 Planning mobile robot on Tree (EASY Version) (BFS+状态压缩)
题目大意:一张无向连通图,有一个机器人,若干个石头,每次移动只能移向相连的节点,并且一个节点上只能有一样且一个东西(机器人或石头),找出一种使机器人从指定位置到另一个指定位置的最小步数方案,输出移动步 ...
- Uva 12569 Planning mobile robot on Tree (EASY Version)
基本思路就是Bfs: 本题的一个关键就是如何判段状态重复. 1.如果将状态用一个int型数组表示,即假设为int state[17],state[0]代表机器人的位置,从1到M从小到大表示障碍物的位置 ...
- UVA Planning mobile robot on Tree树上的机器人(状态压缩+bfs)
用(x,s)表示一个状态,x表示机器人的位置,s表示其他位置有没有物体.用个fa数组和act数组记录和打印路径,转移的时候判断一下是不是机器人在动. #include<bits/stdc++.h ...
- 2019.03.09 codeforces620E. New Year Tree(线段树+状态压缩)
传送门 题意:给一棵带颜色的树,可以给子树染色或者问子树里有几种不同的颜色,颜色值不超过606060. 思路:颜色值很小,因此状压一个区间里的颜色用线段树取并集即可. 代码: #include< ...
- Codeforces Round #540 (Div. 3) F1. Tree Cutting (Easy Version) 【DFS】
任意门:http://codeforces.com/contest/1118/problem/F1 F1. Tree Cutting (Easy Version) time limit per tes ...
- Ping-Pong (Easy Version)(DFS)
B. Ping-Pong (Easy Version) time limit per test 2 seconds memory limit per test 256 megabytes input ...
- ZOJ 3868 - Earthstone: Easy Version
3868 - Earthstone: Easy Version Time Limit:2000MS Memory Limit:65536KB 64bit IO Format:%lld ...
- Codeforces 1077F1 Pictures with Kittens (easy version)(DP)
题目链接:Pictures with Kittens (easy version) 题意:给定n长度的数字序列ai,求从中选出x个满足任意k长度区间都至少有一个被选到的最大和. 题解:$dp[i][j ...
- Coffee and Coursework (Easy version)
Coffee and Coursework (Easy version) time limit per test 1 second memory limit per test 256 megabyte ...
随机推荐
- Spring核心——设计模式与IoC
“Spring”——每一个Javaer开发者都绕不开的字眼,从21世纪第一个十年国内异常活跃的SSH框架,到现在以Spring Boot作为入口粘合了各种应用.Spring现在已经完成了从web入口到 ...
- 基于redis的分布式锁(不适合用于生产环境)
基于redis的分布式锁 1 介绍 这篇博文讲介绍如何一步步构建一个基于Redis的分布式锁.会从最原始的版本开始,然后根据问题进行调整,最后完成一个较为合理的分布式锁. 本篇文章会将分布式锁的实现分 ...
- ajax知识点
什么是AJAX? AJAX = Asynchronous JavaScript and XML(异步的 JavaScript 和 XML). AJAX 不是新的编程语言,而是一种使用现有标准的新方法. ...
- 一次断电引发的svn数据库故障
作者:朱金灿 来源:http://blog.csdn.net/clever101 昨天办公室停电了.然后今天更新svn数据库时出现一个不能读取文件:End of file found的错误,具体如下图 ...
- Retrieve OpenGL Context from Qt 5.5 on OSX
In the latest Qt 5.5, the QOpenGLWidget is much better and has less bugs than the QGLWidget, but it ...
- OkHttpUtils简单的网络去解析使用
先添加依赖: implementation 'com.google.code.gson:gson:2.2.4' implementation 'com.zhy:okhttputils:2.0.0' 网 ...
- (后端)mybatis 模糊查询 mapper.xml的写法(转)
原文地址:https://blog.csdn.net/sc6231565/article/details/46412765 1. sql中字符串拼接 SELECT * FROM tableName W ...
- Appium+java 获取元素状态
元素的属性我们经常会用到,当定位到某个元素后,有时会需要用到这个元素的text值.className.resource-id.checked等. 一般标准的属性我们都可以通过get_attribut ...
- Jmeter和Loadrunner的异同
1.jmeter的架构跟loadrunner原理一样,都是通过中间代理,监控&收集并发客户端发现的指令,把他们生成脚本,再发送到应用服务器,再监控服务器反馈的结果的一个过程. 2.分布式中间代 ...
- HTTP Authentication
PS:近期看了一本思维导图的书,实践一下.