linux内核SPI总线驱动分析(一)(转)
linux内核SPI总线驱动分析(一)(转)
下面有两个大的模块:
一个是SPI总线驱动的分析 (研究了具体实现的过程)
另一个是SPI总线驱动的编写(不用研究具体的实现过程)
SPI总线驱动分析
1 SPI概述
SPI是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口,是Motorola首先在其MC68HCXX系列处理器上定义的。SPI接口主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。SPI是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便。
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要4根线,事实上3根也可以。也是所有基于SPI的设备共有的,它们是SDI(数据输入),SDO(数据输出),SCLK(时钟),CS(片选)。
MOSI(SDO):主器件数据输出,从器件数据输入。
MISO(SDI):主器件数据输入,从器件数据输出。
SCLK :时钟信号,由主器件产生。
CS:从器件使能信号,由主器件控制。
其中CS是控制芯片是否被选中的,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),对此芯片的操作才有效,这就允许在同一总线上连接多个SPI设备成为可能。需要注意的是,在具体的应用中,当一条SPI总线上连接有多个设备时,SPI本身的CS有可能被其他的GPIO脚代替,即每个设备的CS脚被连接到处理器端不同的GPIO,通过操作不同的GPIO口来控制具体的需要操作的SPI设备,减少各个SPI设备间的干扰。
SPI是串行通讯协议,也就是说数据是一位一位从MSB或者LSB开始传输的,这就是SCK时钟线存在的原因,由SCK提供时钟脉冲,MISO、MOSI则基于此脉冲完成数据传输。 SPI支持4-32bits的串行数据传输,支持MSB和LSB,每次数据传输时当从设备的大小端发生变化时需要重新设置SPI Master的大小端。
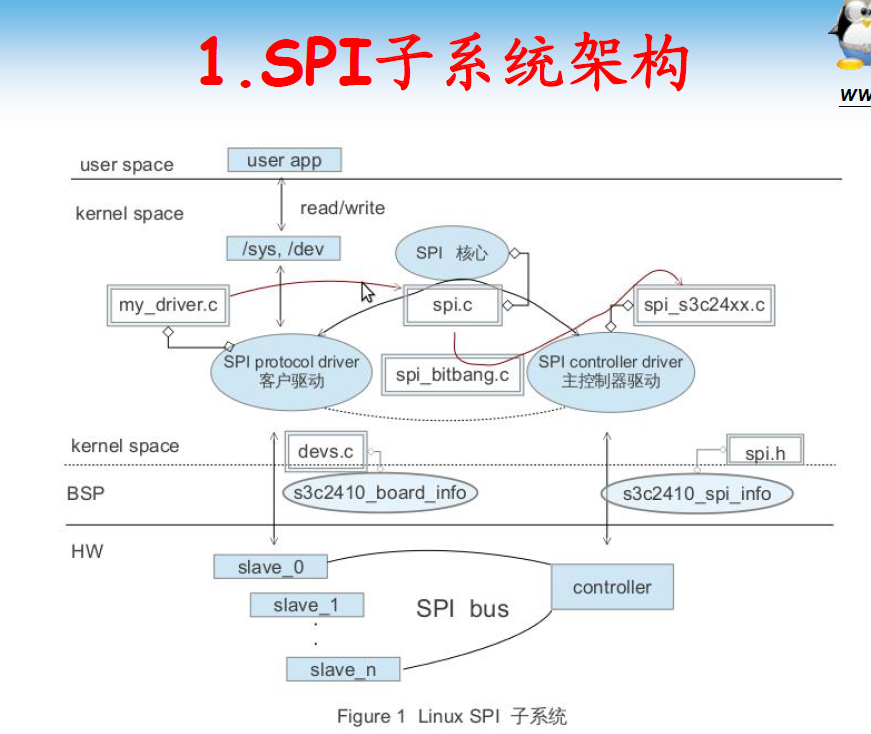
2 Linux SPI驱动总体架构
在2.6的linux内核中,SPI的驱动架构可以分为如下三个层次:SPI 核心层、SPI控制器驱动层和SPI设备驱动层。
Linux 中SPI驱动代码位于drivers/spi目录。
2.1 SPI核心层
SPI核心层是Linux的SPI核心部分,提供了核心数据结构的定义、SPI控制器驱动和设备驱动的注册、注销管理等API。其为硬件平台无关层,向下屏蔽了物理总线控制器的差异,定义了统一的访问策略和接口;其向上提供了统一的接口,以便SPI设备驱动通过总线控制器进行数据收发。
Linux中,SPI核心层的代码位于driver/spi/ spi.c。由于该层是平台无关层,本文将不再叙述,有兴趣可以查阅相关资料。
2.2 SPI控制器驱动层
SPI控制器驱动层,每种处理器平台都有自己的控制器驱动,属于平台移植相关层。它的职责是为系统中每条SPI总线实现相应的读写方法。在物理上,每个SPI控制器可以连接若干个SPI从设备。
在系统开机时,SPI控制器驱动被首先装载。一个控制器驱动用于支持一条特定的SPI总线的读写。一个控制器驱动可以用数据结构struct spi_master来描述。
在include/liunx/spi/spi.h文件中,在数据结构struct spi_master定义如下:
struct spi_master {
struct device dev;
s16 bus_num;
u16 num_chipselect;
int (*setup)(struct spi_device *spi);
int (*transfer)(struct spi_device *spi, struct spi_message *mesg);
void (*cleanup)(struct spi_device *spi);
};
bus_num为该控制器对应的SPI总线号。
num_chipselect 控制器支持的片选数量,即能支持多少个spi设备
setup函数是设置SPI总线的模式,时钟等的初始化函数, 针对设备设置SPI的工作时钟及数据传输模式等。在spi_add_device函数中调用。
transfer函数是实现SPI总线读写方法的函数。实现数据的双向传输,可能会睡眠
cleanup注销时候调用
2.3 SPI设备驱动层
SPI设备驱动层为用户接口层,其为用户提供了通过SPI总线访问具体设备的接口。
SPI设备驱动层可以用两个模块来描述,struct spi_driver和struct spi_device。
相关的数据结构如下:
struct spi_driver {
int (*probe)(struct spi_device *spi);
int (*remove)(struct spi_device *spi);
void (*shutdown)(struct spi_device *spi);
int (*suspend)(struct spi_device *spi, pm_message_t mesg);
int (*resume)(struct spi_device *spi);
struct device_driver driver;
};
Driver是为device服务的,spi_driver注册时会扫描SPI bus上的设备,进行驱动和设备的绑定,probe函数用于驱动和设备匹配时被调用。从上面的结构体注释中我们可以知道,SPI的通信是通过消息队列机制,而不是像I2C那样通过与从设备进行对话的方式。
struct spi_device {
struct device dev;
struct spi_master *master;
u32 max_speed_hz;
u8 chip_select;
u8 mode;
u8 bits_per_word;
int irq;
void *controller_state;
void *controller_data;
char modalias[];
};
.modalias = "m25p10",
.mode =SPI_MODE_0, //CPOL=0, CPHA=0 此处选择具体数据传输模式
.max_speed_hz = 10000000, //最大的spi时钟频率
/* Connected to SPI-0 as 1st Slave */
.bus_num = 0, //设备连接在spi控制器0上
.chip_select = 0, //片选线号,在S5PC100的控制器驱动中没有使用它作为片选的依据,而是选择了下文controller_data里的方法。
.controller_data = &smdk_spi0_csi[0],
通常来说spi_device对应着SPI总线上某个特定的slave。并且spi_device封装了一个spi_master结构体。spi_device结构体包含了私有的特定的slave设备特性,包括它最大的频率,片选那个,输入输出模式等等
4 spi_device以下一系列的操作是在platform板文件中完成!
struct spi_board_info {
charmodalias[SPI_NAME_SIZE];
const void*platform_data;
void*controller_data;
intirq;
u32max_speed_hz;
u16bus_num;
u16chip_select;
u8mode;
};
这个结构体记录了SPI外设使用的主机控制器序号、片选信号、数据比特率、SPI传输方式等
构建的操作是以下的两个步骤:
1.
static struct spi_board_info s3c_spi_devs[] __initdata = {
{
.modalias = "m25p10a",
.mode = SPI_MODE_0,
.max_speed_hz = ,
.bus_num = ,
.chip_select = ,
.controller_data = &smdk_spi0_csi[SMDK_MMCSPI_CS],
},
};
2.
而这个info在init函数调用的时候会初始化:
spi_register_board_info(s3c_spi_devs,ARRAY_SIZE(s3c_spi_devs));
spi_register_board_info(s3c_spi_devs,ARRAY_SIZE(s3c_spi_devs));//注册spi_board_info。这个代码会把spi_board_info注册到链表board_list上。spi_device封装了一个spi_master结构体,事实上spi_master的注册会在spi_register_board_info之后,spi_master注册的过程中会调用scan_boardinfo扫描board_list,找到挂接在它上面的spi设备,然后创建并注册spi_device。
至此spi_device就构建并注册完成了!!!!!!!!!!!!!
5 spi_driver的构建与注册
driver有几个重要的结构体:spi_driver、spi_transfer、spi_message
driver有几个重要的函数 :spi_message_init、spi_message_add_tail、spi_sync
//spi_driver的构建
static struct spi_driver m25p80_driver = {
.driver = {
.name ="m25p80",
.bus =&spi_bus_type,
.owner = THIS_MODULE,
},
.probe = m25p_probe,
.remove =__devexit_p(m25p_remove),
};
//spidriver的注册
spi_register_driver(&m25p80_driver);
在有匹配的spi_device时,会调用m25p_probe
probe里完成了spi_transfer、spi_message的构建;
spi_message_init、spi_message_add_tail、spi_sync、spi_write_then_read函数的调用
例如:
*/
static int m25p10a_read( struct m25p10a *flash, loff_t from,
size_t len, char *buf )
{
int r_count = , i;
struct spi_transfer st[];
struct spi_message msg; spi_message_init( &msg );
memset( st, , sizeof(st) ); flash->cmd[] = CMD_READ_BYTES;
flash->cmd[] = from >> ;
flash->cmd[] = from >> ;
flash->cmd[] = from; st[ ].tx_buf = flash->cmd;
st[ ].len = CMD_SZ;
spi_message_add_tail( &st[], &msg ); st[ ].rx_buf = buf;
st[ ].len = len;
spi_message_add_tail( &st[], &msg ); mutex_lock( &flash->lock ); /* Wait until finished previous write command. */
if (wait_till_ready(flash)) {
mutex_unlock( &flash->lock );
return -;
} spi_sync( flash->spi, &msg );
r_count = msg.actual_length - CMD_SZ;
printk( "in (%s): read %d bytes\n", __func__, r_count );
for( i = ; i < r_count; i++ ) {
printk( "0x%02x\n", buf[ i ] );
} mutex_unlock( &flash->lock );
return ;
}
static int m25p10a_write( struct m25p10a *flash, loff_t to,
size_t len, const char *buf )
{
int w_count = , i, page_offset; struct spi_transfer st[]; struct spi_message msg;
write_enable( flash ); //写使能 spi_message_init( &msg ); memset( st, , sizeof(st) ); flash->cmd[] = CMD_PAGE_PROGRAM;
flash->cmd[] = to >> ;
flash->cmd[] = to >> ;
flash->cmd[] = to; st[ ].tx_buf = flash->cmd;
st[ ].len = CMD_SZ;
//填充spi_transfer,将transfer放在队列后面
spi_message_add_tail( &st[], &msg ); st[ ].tx_buf = buf;
st[ ].len = len;
spi_message_add_tail( &st[], &msg ); spi_sync( flash->spi, &msg ); 调用spi_master发送spi_message return ;
}
static int m25p10a_probe(struct spi_device *spi)
{
int ret = ;
struct m25p10a *flash;
char buf[ ];
flash = kzalloc( sizeof(struct m25p10a), GFP_KERNEL );
flash->spi = spi;
/* save flash as driver's private data */
spi_set_drvdata( spi, flash );
memset( buf, 0x7, );
m25p10a_write( flash, , , buf); //0地址写入20个7
memset( buf, , );
m25p10a_read( flash, , , buf ); //0地址读出25个数 return ;
}
到目前为止,完成了SPI的驱动和应用
linux内核SPI总线驱动分析(一)(转)的更多相关文章
- linux内核SPI总线驱动分析(二)(转)
简而言之,SPI驱动的编写分为: 1.spi_device就构建并注册 在板文件中添加spi_board_info,并在板文件的init函数中调用spi_register_board_info(s3 ...
- Linux内核中SPI总线驱动分析
本文主要有两个大的模块:一个是SPI总线驱动的分析 (研究了具体实现的过程): 另一个是SPI总线驱动的编写(不用研究具体的实现过程). 1 SPI概述 SPI是英语Serial Peripheral ...
- Linux SD/MMC/SDIO驱动分析_转
转自:Linux SD/MMC/SDIO驱动分析 https://www.cnblogs.com/cslunatic/p/3678045.html#3053341 一.SD/MMC/SDIO概念 ...
- Linux内核--网络栈实现分析(十一)--驱动程序层(下)
本文分析基于Linux Kernel 1.2.13 原创作品,转载请标明http://blog.csdn.net/yming0221/article/details/7555870 更多请查看专栏,地 ...
- Linux内核--网络栈实现分析(七)--数据包的传递过程(下)
本文分析基于Linux Kernel 1.2.13 原创作品,转载请标明http://blog.csdn.net/yming0221/article/details/7545855 更多请查看专栏,地 ...
- Linux内核--网络栈实现分析(二)--数据包的传递过程--转
转载地址http://blog.csdn.net/yming0221/article/details/7492423 作者:闫明 本文分析基于Linux Kernel 1.2.13 注:标题中的”(上 ...
- Linux内核调用I2C驱动_驱动嵌套驱动方法
禁止转载!!!! Linux内核调用I2C驱动_以MPU6050为例 0. 导语 最近一段时间都在恶补数据结构和C++,加上导师的事情比较多,Linux内核驱动的学习进程总是被阻碍.不过,十一假期终于 ...
- Linux 内核 EISA 总线
扩展 ISA (EISA) 总线是一个对 ISA 的 32-位 扩展, 带有一个兼容的接口连接器; ISA 设备板可被插入一个 EISA 连接器. 增加的线在 ISA 接触之下被连接. 如同 PCI ...
- 【转】 linux内核移植和驱动添加(三)
原文网址:http://blog.chinaunix.net/uid-29589379-id-4708909.html 原文地址:linux内核移植和驱动添加(三) 作者:genehang 四,LED ...
随机推荐
- 共享池之六:shared pool latch/ library cache latch /lock pin 简介
latch:library cache --desc v$librarycache; latch:library cache用于保护hash bucket.library cache lock保护HA ...
- HDU2176尼姆博弈
HDU2176 http://acm.hdu.edu.cn/showproblem.php?pid=2176 假设有3个数,a[0],a[1],a[2];那么ans=a[0]^a[1]^a[2];若a ...
- unity两点之间抛物线,完美金手指
学校享受的日子一去不复还了,呜呜.话说面试了几个公司,真心没准备好就上了,结果当然是小悲催.还好有容身之处,就算是搬砖,也有可能为自己盖楼,吼吼. 好,下面我来分享一道有意思的面试题,说他有意思,是因 ...
- 传智Java基础知识测试
共40道选择题,每题2.5分.多选题有错则全错,全对才满分. 单选题: 1. 下列哪个声明是错误的?(B) A. int i=10; B. float f=1.1; C. double ...
- Android开发-API指南-Manifest介绍
App Manifest 英文原文:http://developer.android.com/guide/topics/manifest/manifest-intro.html 采集(更新)日期:20 ...
- Android STL PORT
ndk中包含了stl对应的库,在$(NKD_HOME)/sources/cxx-stl/stlport/stlport 有关Android NDK的C++ STL开发相关总结如下: 从Android ...
- 重拾qt
最近公司又接了一个煤矿的项目,要写个小程序摘取数据,我是公司唯一c++程序员,本来搞ios搞好好的,现在又得重拾半年没摸得qt了.呵呵...呵呵呵. 这里只记录这次小程序的一些小的总结吧.. 1.中文 ...
- 在PHP5.3以上版本运行ecshop和ecmall出现的问题及解决方案
ecshop 问题一:商城首页报错 Strict Standards: Only variables should be passed by reference in D:\wamp\ecshop\i ...
- 【IHttpHandler】HttpModule,HttpHandler,HttpHandlerFactory简单使用
这三个对象我们在开发Asp.net程序时经常会用到,似乎很熟悉,但有时候又不太确定.本文通过一个简单的例子来直观的比较一下这三个对象的使用. HttpModule:Http模块,可以在页面处理前后.应 ...
- leetcode 26
26. Remove Duplicates from Sorted Array Given a sorted array, remove the duplicates in place such th ...