协议——SCCB与IIC的区别
SCCB(Serial Camera Control Bus,串行摄像头控制总线)是由OV(OmniVision的简称)公司定义和发展的三线式串行总线,该总线控制着摄像头大部分的功能,包括图像数据格式、分辨率以及图像处理参数等。结构框图如下所示:

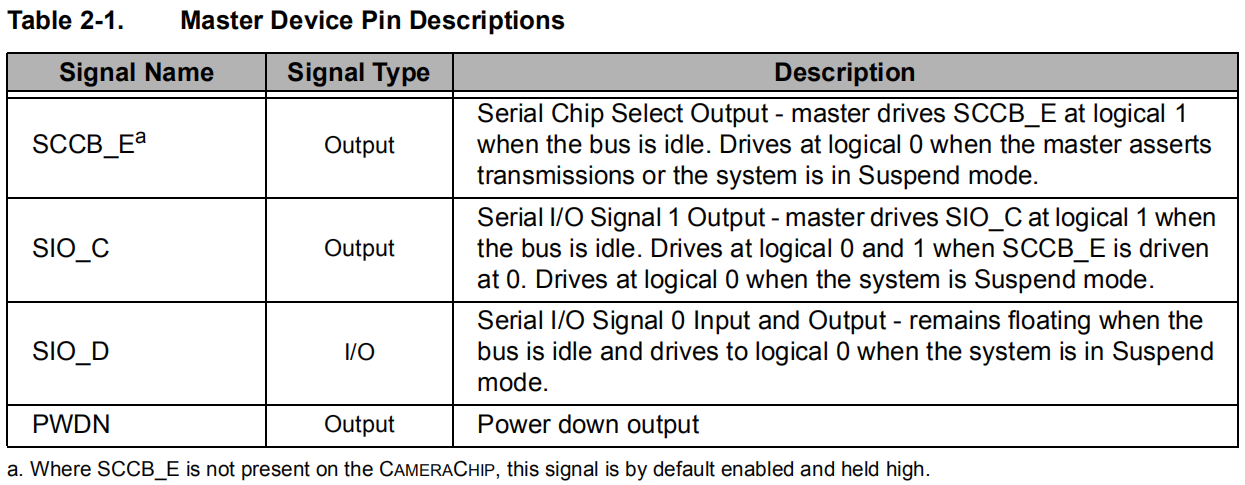
OV公司为了减少传感器引脚的封装,现在SCCB总线大多采用两线式接口总线。OV7725使用的是两线式接口总线,该接口总线包括SIO_C串行时钟输入线和SIO_D串行双向数据线,分别相当于IIC协议的SCL信号线和SDA信号线。SIO_C的最小时间为10us,即最大频率为100K。一般来说,100K-400K之间都可以。

由此可见,SCCB就是改编版的IIC,完全可以按照IIC来理解,下面仔细讲解SCCB的时序以及和IIC的不同之处。
一、SCCB起始和结束(与IIC完全一致)

二、SCCB写(与IIC完全一致)

ID Address(W)里面就已经包括进了IIC中的“读写控制位”,所以没有额外写出。
即:start + phase_1 + phase_2 + phase_3 + stop
“X”的意思是“don't care”,该位是由从机发出应答信号来响应主机表示当前ID Address、Sub-address和Write Data是否传输完成,但是从机有可能不发出应答信号,因此主机(此处指FPGA)可不用判断此处是否有应答,直接默认当前传输完成即可。“X”即IIC中的ACK应答位。
三、SCCB读

数据手册中的SCCB读只写了上图的Phase3和Phase4,实际上它是和Phase1和Phase2联系在一起的。SCCB不支持连续读,Phase4的主机应答位必须为NA(no ack),即为1,所以SCCB读其实就专指单次读,和IIC单次读几乎一样。
区别就一点:在IIC读传输协议中,写完寄存器地址后会有restart即重复开始的操作;而SCCB读传输协议中没有重复开始的概念,在写完寄存器地址后,需发起总线停止信号。
即:start_1 + phase_1 + phase_2 + stop_1 + start_2 + phase_3 + phase_4 + stop_2
四、SCCB和IIC的区别
1.SCCB的应答位称为X,表示“don't care”,而IIC应答位称为ACK。
2.SCCB只能单次读,而IIC除了单次读还支持连续读。
3.SCCB读操作中间有stop,而IIC读操作中间可以有stop也可以不需要stop,具体表现如下
SCCB读:start_1 + phase_1 + phase_2 + stop_1 + start_2 + phase_3 + phase_4 + stop_2
IIC读:start_1 + phase_1 + phase_2 + + start_2 + phase_3 + phase_4 + stop_2
除去上面三点,SCCB和IIC再无区别,因此如果只需要配置寄存器(只用到写),可以直接拿IIC的时序来当做SCCB用,如果需要读,读操作中间必须有一个stop。
五、SCCB控制器Verilog代码
//**************************************************************************
// *** 名称 : sccb.v
// *** 作者 : xianyu_FPGA
// *** 博客 : https://www.cnblogs.com/xianyufpga/
// *** 日期 : 2019-08-10
// *** 描述 : SCCB控制器,只支持写
//************************************************************************** module sccb
//========================< 参数 >==========================================
#(
parameter DEVICE_ID = 'b01010000 , //器件ID
parameter CLK = 'd50_000_000 , //本模块的时钟频率
parameter SCL = 'd250_000 //输出的SCL时钟频率
)
//========================< 端口 >==========================================
(
input clk , //时钟
input rst_n , //复位,低电平有效
//SCCB control --------------------------------------
input sccb_en , //SCCB触发信号
input addr16_en , //16位地址使能
input addr8_en , //8位地址使能
//SCCB input ----------------------------------------
input [:] sccb_addr , //SCCB器件内地址
input [ :] sccb_data , //SCCB要写的数据
//SCCB output ---------------------------------------
output reg sccb_done , //SCCB一次操作完成
output reg sccb_scl , //SCCB的SCL时钟信号
inout sccb_sda , //SCCB的SDA数据信号
//dri_clk -------------------------------------------
output reg sccb_dri_clk //驱动SCCB操作的驱动时钟,1Mhz
);
//========================< 状态机参数 >====================================
localparam IDLE = 'b00_0001 ; //空闲状态
localparam DEVICE = 'b00_0010 ; //写器件地址
localparam ADDR_16 = 'b00_0100 ; //写字地址高8位
localparam ADDR_8 = 'b00_1000 ; //写字地址低8位
localparam DATA = 'b01_0000 ; //写数据
localparam STOP = 'b10_0000 ; //结束
//========================< 信号 >==========================================
reg sda_dir ; //SCCB数据(SDA)方向控制
reg sda_out ; //SDA输出信号
reg state_done ; //状态结束
reg [ :] cnt ; //计数
reg [ :] state_c ; //状态机当前状态
reg [ :] state_n ; //状态机下一状态
reg [:] sccb_addr_t ; //地址寄存
reg [ :] sccb_data_t ; //数据寄存
reg [ :] clk_cnt ; //分频时钟计数
wire [ :] clk_divide ; //模块驱动时钟的分频系数 //==========================================================================
//== sda控制
//==========================================================================
assign sccb_sda = sda_dir ? sda_out : 'bz; //SDA数据输出或高阻 //==========================================================================
//== 生成SCL的4倍时钟来驱动后面SCCB的操作,生成1Mhz的sccb_dri_clk
//==========================================================================
assign clk_divide = (CLK/SCL) >> ; // >>3即除以8 always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
sccb_dri_clk <= 'b1;
clk_cnt <= 'd0;
end
else if(clk_cnt == clk_divide - 'd1) begin
clk_cnt <= 'd0;
sccb_dri_clk <= ~sccb_dri_clk;
end
else
clk_cnt <= clk_cnt + 'b1;
end //==========================================================================
//== 状态机
//==========================================================================
always @(posedge sccb_dri_clk or negedge rst_n) begin
if(!rst_n)
state_c <= IDLE;
else
state_c <= state_n;
end always @(*) begin
case(state_c)
IDLE: begin //空闲状态
if(sccb_en)
state_n = DEVICE;
else
state_n = IDLE;
end
DEVICE: begin //写器件ID
if(state_done) begin
if(addr16_en)
state_n = ADDR_16;
else if(addr8_en)
state_n = ADDR_8 ;
end
else
state_n = DEVICE;
end
ADDR_16: begin //写地址高8位
if(state_done)
state_n = ADDR_8;
else
state_n = ADDR_16;
end
ADDR_8: begin //写地址低8位
if(state_done)
state_n = DATA;
else
state_n = ADDR_8;
end
DATA: begin //写数据
if(state_done)
state_n = STOP;
else
state_n = DATA;
end
STOP: begin //结束
if(state_done)
state_n = IDLE;
else
state_n = STOP ;
end
default:state_n= IDLE;
endcase
end //==========================================================================
//== 设计各路信号
//==========================================================================
always @(posedge sccb_dri_clk or negedge rst_n) begin
if(!rst_n) begin
sccb_scl <= 'b1;
sda_out <= 'b1;
sda_dir <= 'b1;
sccb_done <= 'b0;
cnt <= 'b0;
state_done <= 'b0;
sccb_addr_t <= 'b0;
sccb_data_t <= 'b0;
end
else begin
state_done <= 'b0 ;
cnt <= cnt + 'b1 ;
case(state_c)
//--------------------------------------------------- 空闲状态
IDLE: begin
sccb_scl <= 'b1;
sda_out <= 'b1;
sda_dir <= 'b1;
sccb_done <= 'b0;
cnt <= 'b0;
if(sccb_en) begin
sccb_addr_t <= sccb_addr;
sccb_data_t <= sccb_data;
end
end
//--------------------------------------------------- 写器件ID
DEVICE: begin
case(cnt)
'd1 : sda_out <= 1'b0;
'd3 : sccb_scl <= 1'b0;
'd4 : sda_out <= DEVICE_ID[7];
'd5 : sccb_scl <= 1'b1;
'd7 : sccb_scl <= 1'b0;
'd8 : sda_out <= DEVICE_ID[6];
'd9 : sccb_scl <= 1'b1;
'd11: sccb_scl <= 1'b0;
'd12: sda_out <= DEVICE_ID[5];
'd13: sccb_scl <= 1'b1;
'd15: sccb_scl <= 1'b0;
'd16: sda_out <= DEVICE_ID[4];
'd17: sccb_scl <= 1'b1;
'd19: sccb_scl <= 1'b0;
'd20: sda_out <= DEVICE_ID[3];
'd21: sccb_scl <= 1'b1;
'd23: sccb_scl <= 1'b0;
'd24: sda_out <= DEVICE_ID[2];
'd25: sccb_scl <= 1'b1;
'd27: sccb_scl <= 1'b0;
'd28: sda_out <= DEVICE_ID[1];
'd29: sccb_scl <= 1'b1;
'd31: sccb_scl <= 1'b0;
'd32: sda_out <= DEVICE_ID[0];
'd33: sccb_scl <= 1'b1;
'd35: sccb_scl <= 1'b0;
'd36: begin
sda_dir <= 'b0; //从机应答
sda_out <= 'b1;
end
'd37: sccb_scl <= 1'b1;
'd38: state_done <= 1'b1; //状态结束
'd39: begin
sccb_scl <= 'b0;
cnt <= 'b0;
end
default : ;
endcase
end
//--------------------------------------------------- 写字地址高8位
ADDR_16: begin
case(cnt)
'd0 : begin
sda_dir <= 'b1 ;
sda_out <= sccb_addr_t[];
end
'd1 : sccb_scl <= 1'b1;
'd3 : sccb_scl <= 1'b0;
'd4 : sda_out <= sccb_addr_t[14];
'd5 : sccb_scl <= 1'b1;
'd7 : sccb_scl <= 1'b0;
'd8 : sda_out <= sccb_addr_t[13];
'd9 : sccb_scl <= 1'b1;
'd11: sccb_scl <= 1'b0;
'd12: sda_out <= sccb_addr_t[12];
'd13: sccb_scl <= 1'b1;
'd15: sccb_scl <= 1'b0;
'd16: sda_out <= sccb_addr_t[11];
'd17: sccb_scl <= 1'b1;
'd19: sccb_scl <= 1'b0;
'd20: sda_out <= sccb_addr_t[10];
'd21: sccb_scl <= 1'b1;
'd23: sccb_scl <= 1'b0;
'd24: sda_out <= sccb_addr_t[9];
'd25: sccb_scl <= 1'b1;
'd27: sccb_scl <= 1'b0;
'd28: sda_out <= sccb_addr_t[8];
'd29: sccb_scl <= 1'b1;
'd31: sccb_scl <= 1'b0;
'd32: begin
sda_dir <= 'b0; //从机应答
sda_out <= 'b1;
end
'd33: sccb_scl <= 1'b1;
'd34: state_done <= 1'b1; //状态结束
'd35: begin
sccb_scl <= 'b0;
cnt <= 'b0;
end
default : ;
endcase
end
//--------------------------------------------------- 写字地址低8位
ADDR_8: begin
case(cnt)
'd0: begin
sda_dir <= 'b1 ;
sda_out <= sccb_addr_t[];
end
'd1 : sccb_scl <= 1'b1;
'd3 : sccb_scl <= 1'b0;
'd4 : sda_out <= sccb_addr_t[6];
'd5 : sccb_scl <= 1'b1;
'd7 : sccb_scl <= 1'b0;
'd8 : sda_out <= sccb_addr_t[5];
'd9 : sccb_scl <= 1'b1;
'd11: sccb_scl <= 1'b0;
'd12: sda_out <= sccb_addr_t[4];
'd13: sccb_scl <= 1'b1;
'd15: sccb_scl <= 1'b0;
'd16: sda_out <= sccb_addr_t[3];
'd17: sccb_scl <= 1'b1;
'd19: sccb_scl <= 1'b0;
'd20: sda_out <= sccb_addr_t[2];
'd21: sccb_scl <= 1'b1;
'd23: sccb_scl <= 1'b0;
'd24: sda_out <= sccb_addr_t[1];
'd25: sccb_scl <= 1'b1;
'd27: sccb_scl <= 1'b0;
'd28: sda_out <= sccb_addr_t[0];
'd29: sccb_scl <= 1'b1;
'd31: sccb_scl <= 1'b0;
'd32: begin
sda_dir <= 'b0; //从机应答
sda_out <= 'b1;
end
'd33: sccb_scl <= 1'b1;
'd34: state_done <= 1'b1; //状态结束
'd35: begin
sccb_scl <= 'b0;
cnt <= 'b0;
end
default : ;
endcase
end
//--------------------------------------------------- 写数据
DATA: begin
case(cnt)
'd0: begin
sda_out <= sccb_data_t[];
sda_dir <= 'b1;
end
'd1 : sccb_scl <= 1'b1;
'd3 : sccb_scl <= 1'b0;
'd4 : sda_out <= sccb_data_t[6];
'd5 : sccb_scl <= 1'b1;
'd7 : sccb_scl <= 1'b0;
'd8 : sda_out <= sccb_data_t[5];
'd9 : sccb_scl <= 1'b1;
'd11: sccb_scl <= 1'b0;
'd12: sda_out <= sccb_data_t[4];
'd13: sccb_scl <= 1'b1;
'd15: sccb_scl <= 1'b0;
'd16: sda_out <= sccb_data_t[3];
'd17: sccb_scl <= 1'b1;
'd19: sccb_scl <= 1'b0;
'd20: sda_out <= sccb_data_t[2];
'd21: sccb_scl <= 1'b1;
'd23: sccb_scl <= 1'b0;
'd24: sda_out <= sccb_data_t[1];
'd25: sccb_scl <= 1'b1;
'd27: sccb_scl <= 1'b0;
'd28: sda_out <= sccb_data_t[0];
'd29: sccb_scl <= 1'b1;
'd31: sccb_scl <= 1'b0;
'd32: begin
sda_dir <= 'b0; //从机应答
sda_out <= 'b1;
end
'd33: sccb_scl <= 1'b1;
'd34: state_done <= 1'b1; //状态结束
'd35: begin
sccb_scl <= 'b0;
cnt <= 'b0;
end
default : ;
endcase
end
//--------------------------------------------------- 结束
STOP: begin
case(cnt)
'd0: begin
sda_dir <= 'b1;
sda_out <= 'b0;
end
'd1 : sccb_scl <= 1'b1;
'd3 : sda_out <= 1'b1;
'd15: state_done <= 1'b1; //状态结束
'd16: begin
cnt <= 'b0;
sccb_done <= 'b1; //sccb配置完成
end
default : ;
endcase
end
endcase
end
end endmodule
参考资料:
[1]OmniVision Serial Camera Control Bus (SCCB) Functional Specification
[2]正点原子FPGA教程
[3]开源骚客.SDRAM那些事儿
协议——SCCB与IIC的区别的更多相关文章
- http、TCP/IP协议与socket之间的区别
http.TCP/IP协议与socket之间的区别 网络由下往上分为: www.2cto.com 物理层-- 数据链路层-- 网络层-- ...
- http、TCP/IP协议与socket之间的区别(转载)
http.TCP/IP协议与socket之间的区别 https://www.cnblogs.com/iOS-mt/p/4264675.html http.TCP/IP协议与socket之间的区别 ...
- 转 WebService两种发布协议--SOAP和REST的区别
转发文章 https://blog.csdn.net/zl834205311/article/details/62231545?ABstrategy=codes_snippets_optimize_v ...
- Python进阶----网络通信基础 ,OSI七层协议() ,UDP和TCP的区别 , TCP/IP协议(三次握手,四次挥手)
Python进阶----网络通信基础 ,OSI七层协议() ,UDP和TCP的区别 , TCP/IP协议(三次握手,四次挥手) 一丶CS/BS 架构 C/S: 客户端/服务器 定义: ...
- HTTP协议 结构,get post 区别(阿里面试)
如果需要想了解相关的TCP的协议结构,底层架构,以及每次面试必问的三次握手,四次挥手可以 参考:TCP协议详解7层和4层解析(美团面试,阿里面试) 尤其是三次握手,四次挥手 具体发送的报文和状态都要掌 ...
- WebService发布协议--SOAP和REST的区别
HTTP是标准超文本传输协议.使用对参数进行编码并将参数作为键值对传递,还使用关联的请求语义.每个协议都包含一系列HTTP请求标头及其他一些信息,定义客户端向服务器请求哪些内容,服务器用一系列HTTP ...
- Git使用总结 Asp.net生命周期与Http协议 托管代码与非托管代码的区别 通过IEnumerable接口遍历数据 依赖注入与控制反转 C#多线程——优先级 AutoFac容器初步 C#特性详解 C#特性详解 WPF 可触摸移动的ScrollViewer控件 .NET(C#)能开发出什么样的APP?盘点那些通过Smobiler开发的移动应用
一,原理 首先,我们要明白Git是什么,它是一个管理工具或软件,用来管理什么的呢?当然是在软件开发过程中管理软件或者文件的不同版本的工具,一些作家也可以用这个管理自己创作的文本文件,由Linus开发的 ...
- HTTP协议中GET和POST区别
GET一般用于获取和查询资源信息:POST一般用于更新信息,表示可能修改服务器上资源的请求 GET请求一般是幂等的 GET请求数据会附加在url之后,POST请求数据放到request-body中 G ...
- HTTP协议GET和POST的区别
from http://blog.csdn.net/whuslei/article/details/6667095 权威点的说明请参考:http://www.cs.tut.fi/~jkorpela/f ...
随机推荐
- 使用WinDbg调试入门(内核模式)
windbg是一个内核模式和用户模式调试器,包含在Windows调试工具中.这里我们提供了一些实践练习,可以帮助您开始使用windbg作为内核模式调试器. 设置内核模式调试 内核模式调试环境通常有两台 ...
- Collecting metrics with the PostgreSQL and TimescaleDB output plugin for Telegraf
转自:https://docs.timescale.com/v1.3/tutorials/telegraf-output-plugin 文章演示了如何使用pg output 插件 以及Telegraf ...
- OpenFOAM——运动和静止的同心圆柱之间的流动(库埃特流)
本算例来自<ANSYS Fluid Dynamics Verification Manual>中的VMFL001: Flow Between Rotating and Stationary ...
- javascript如何动态修改iframe的src
为什么需要动态修改iframe的src?一般情况我们使用iframe,其中的src通常是写死的,但是有些时候我们不希望它是死的src,而是一个活的src. 示例代码如下: <!DOCTYPE h ...
- MySQL各种类型实验
实验一:整数 -- 测试一 create database test;-- 新建数据库,如果已经有了就不需要再创建了 USE test;-- 打开数据库 drop table if exists te ...
- Docker部署web项目-war包
一.部署springmvc(war包)项目 1.手工方式 ①搜索tomcat镜像 docker search tomcat ②拉取tomcat基础镜像至本地仓库 docker pull tomcat ...
- 【转】Android系统中Fastboot和Recovery所扮演的角色。
Android 刷机过程中 Fastboot 和 Recovery 的作用是什么? 自己在知乎的一篇回答,,现在翻出来放到博客,希望可以解答更多人的疑惑,抑或有什么理解上的错误,也望网友指出~ 今天恰 ...
- 【转】使用AllureReport生成测试报告
Allure简介 Allure是一个report框架,可以基于一些测试框架生成测试报告,比较常用的一般是Junit/Testng框架:Allure 生成的报告样式简洁美观,同时又支持中文:Allure ...
- 信用卡号码格式验证-C#实现
/// <summary> /// Is valid? /// </summary> /// <param name="context">Val ...
- linux升级openssl和php_openssl模块
一.OpenSSL源码升级 2014年4月8日,XP宣布正式停止服务的日子,也是OpenSSL爆出大漏洞的日子. OpenSSL主要是负责在一些敏感的数据提交上面被广泛使用,不乏大家经常访问的一些网站 ...