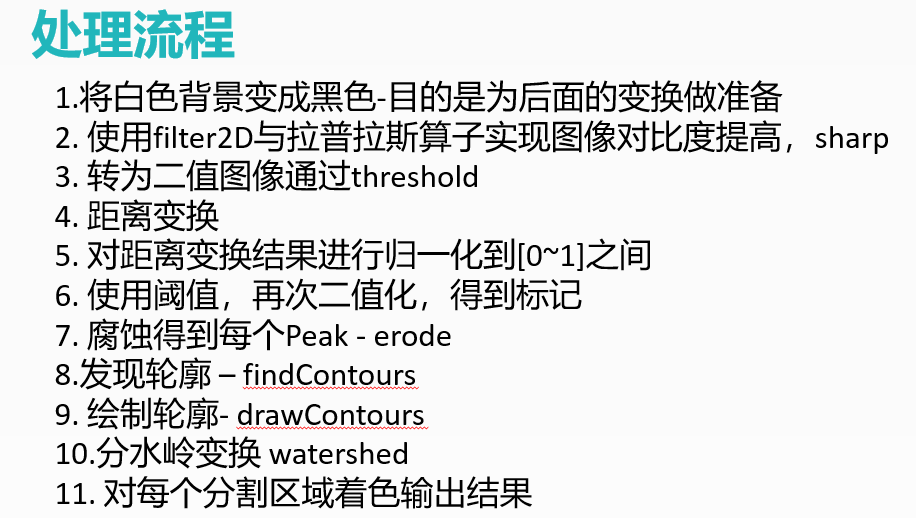
OpenCV——距离变换与分水岭算法的(图像分割)

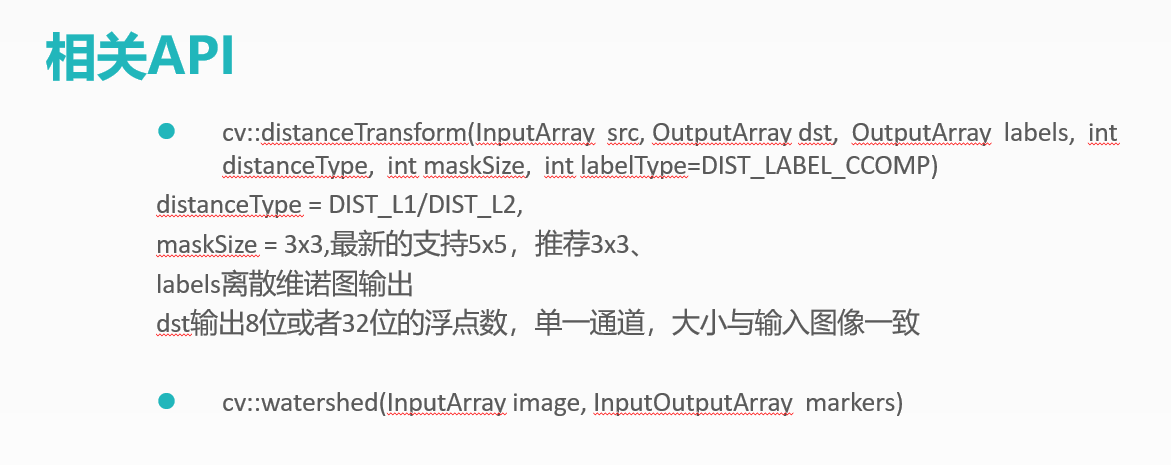
C++: void distanceTransform(InputArray src, OutputArray dst, int distanceType, int maskSize)
参数详解:
InputArray src:输入的图像,一般为二值图像
OutputArray dst:输出的图像
int distanceType:所用的求解距离的类型、
It can be CV_DIST_L1, CV_DIST_L2 , or CV_DIST_C
mask_size 距离变换掩模的大小,可以是 3 或 5. 对 CV_DIST_L1 或 CV_DIST_C 的情况,参数值被强制设定为 3, 因为 3×3 mask 给出 5×5 mask 一样的结果,而且速度还更快。
- mask
- 用户自定义距离情况下的 mask。 在 3×3 mask 下它由两个数(水平/垂直位量,对角线位移量)组成, 5×5 mask 下由三个数组成(水平/垂直位移量,对角位移和 国际象棋里的马步(马走日))
#include <opencv2/opencv.hpp>
#include <iostream> using namespace cv;
using namespace std; Mat src; int main(int argc, char** argv)
{
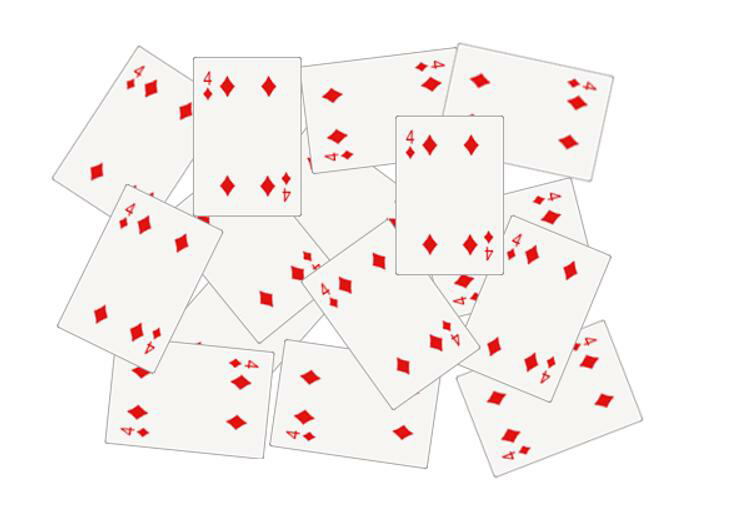
src = imread("分水岭.jpg");
if (src.empty())
{
printf("Can not load Image...");
return -;
}
imshow("input Image",src); //白色背景变成黑色
for (int row=;row<src.rows;row++)
{
for (int col = ; col < src.cols; col++) {
if (src.at<Vec3b>(row, col) == Vec3b(, , )) {
src.at<Vec3b>(row, col)[] = ;
src.at<Vec3b>(row, col)[] = ;
src.at<Vec3b>(row, col)[] = ;
}
}
}
imshow("black backgroung", src); //sharpen(提高对比度)
Mat kernel = (Mat_<float>(, ) << , , , , -, , , , ); //make it more sharp
Mat imgLaplance;
Mat sharpenImg = src;
//拉普拉斯算子实现边缘提取
filter2D(src, imgLaplance, CV_32F, kernel, Point(-, -), , BORDER_DEFAULT);//拉普拉斯有浮点数计算,位数要提高到32
src.convertTo(sharpenImg, CV_32F); //原图减边缘(白色)实现边缘增强
Mat resultImg = sharpenImg - imgLaplance; resultImg.convertTo(resultImg,CV_8UC3);
imgLaplance.convertTo(imgLaplance, CV_8UC3);
imshow("sharpen Image", resultImg); //转换成二值图
Mat binary;
cvtColor(resultImg, resultImg, CV_BGR2GRAY);
threshold(resultImg, binary,,,THRESH_BINARY|THRESH_OTSU);
imshow("binary image",binary); //距离变换
Mat distImg;
distanceTransform(binary,distImg,DIST_L1,,);
normalize(distImg, distImg, , , NORM_MINMAX);
imshow("dist image",distImg); //二值化
threshold(distImg, distImg, 0.4, , THRESH_BINARY);
imshow("dist binary image", distImg); //腐蚀(使得连在一起的部分分开)
Mat k1 = Mat::ones(, , CV_8UC1);
erode(distImg, distImg, k1);
imshow("分开", distImg); //标记
Mat dist_8u;
distImg.convertTo(dist_8u,CV_8U);
vector<vector<Point>> contours;
findContours(dist_8u, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(, )); //创建标记
Mat marker = Mat::zeros(src.size(),CV_32SC1); //画标记
for (size_t i = ; i < contours.size(); i++)
{
drawContours(marker,contours,static_cast<int>(i),Scalar(static_cast<int>(i)+),-);
} circle(marker, Point(, ), , Scalar(, , ), -);
imshow("marker",marker*); //分水岭变换
watershed(src,marker);//根据距离变换的标记,在原图上分离
Mat water = Mat::zeros(marker.size(),CV_8UC1);
marker.convertTo(water,CV_8UC1);
bitwise_not(water, water,Mat());//取反操作
//imshow("源 image", src);
imshow("watershed Image", water); // generate random color
vector<Vec3b> colors;
for (size_t i = ; i < contours.size(); i++) {
int r = theRNG().uniform(, );
int g = theRNG().uniform(, );
int b = theRNG().uniform(, );
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
} // fill with color and display final result
Mat dst = Mat::zeros(marker.size(), CV_8UC3);
for (int row = ; row < marker.rows; row++) {
for (int col = ; col < marker.cols; col++) {
int index = marker.at<int>(row, col);
if (index > && index <= static_cast<int>(contours.size())) {
dst.at<Vec3b>(row, col) = colors[index - ];
}
else {
dst.at<Vec3b>(row, col) = Vec3b(, , );
}
}
}
imshow("Final Result", dst);
waitKey();
return ;
}
OpenCV——距离变换与分水岭算法的(图像分割)的更多相关文章
- Blob分析--粘连颗粒检测 基于距离变换的分水岭区域分割 盆地与原连通域求交集
文章转自微信公众号:机器视觉那些事 *******************************************************************公众号:机器视觉那些事儿*** ...
- opencv::基于距离变换与分水岭的图像分割
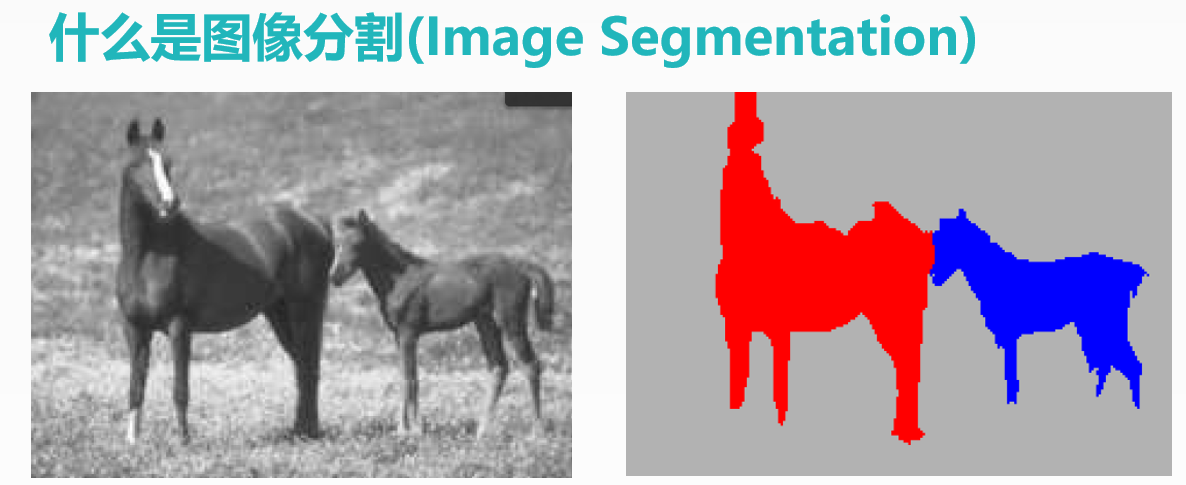
什么是图像分割 图像分割(Image Segmentation)是图像处理最重要的处理手段之一 图像分割的目标是将图像中像素根据一定的规则分为若干(N)个cluster集合,每个集合包含一类像素. 根 ...
- Opencv距离变换distanceTransform应用——细化字符轮廓&&查找物体质心
Opencv中distanceTransform方法用于计算图像中每一个非零点距离离自己最近的零点的距离,distanceTransform的第二个Mat矩阵参数dst保存了每一个点与最近的零点的距离 ...
- matlab实现分水岭算法处理图像分割
此程序为优化后的分水岭算法,避免了图像过分割 I= imread('D:\Images\pic_loc\1870405130305041503.jpg'); imshow(I); h=fspecial ...
- OpenCV学习(23) 使用kmeans算法实现图像分割
本章我们用kmeans算法实现一个简单图像的分割.如下面的图像,我们知道图像分3个簇,背景.白色的任务,红色的丝带以及帽子. Mat img = cv::imread(&quo ...
- 基于标记的分水岭分割算法/OpenCV中距离变换
Opencv分水岭算法——watershed自动图像分割用法 OpenCV距离变换distanceTransform应用 图像分割作为图像识别的基础,在图像处理中占有重要地位,通常需要在进行图像分割算 ...
- python实现分水岭算法
目录: 问题:分水岭算法对图像分割很有作用,怎么把对象分割开来的?分水岭算法是比较完美的分割,跟前面的讲的轮廓不一样! (一)原理 (二)实现 (一)原理 opencv中的分水岭算法是基于距离变换的, ...
- python数字图像处理(19):骨架提取与分水岭算法
骨架提取与分水岭算法也属于形态学处理范畴,都放在morphology子模块内. 1.骨架提取 骨架提取,也叫二值图像细化.这种算法能将一个连通区域细化成一个像素的宽度,用于特征提取和目标拓扑表示. m ...
- OpenCV 学习笔记 04 深度估计与分割——GrabCut算法与分水岭算法
1 使用普通摄像头进行深度估计 1.1 深度估计原理 这里会用到几何学中的极几何(Epipolar Geometry),它属于立体视觉(stereo vision)几何学,立体视觉是计算机视觉的一个分 ...
随机推荐
- Java - Iterator源码解析
java提高篇(三十)-----Iterator 迭代其实我们可以简单地理解为遍历,是一个标准化遍历各类容器里面的所有对象的方法类,它是一个很典型的设计模式.Iterator模式是用于遍历集合类的标准 ...
- 前端SEO
一.搜索引擎工作原理 当我们在输入框中输入关键词,点击搜索或查询时,然后得到结果.深究其背后的故事,搜索引擎做了很多事情. 在搜索引擎网站,比如百度,在其后台有一个非常庞大的数据库,里面存储了海量的关 ...
- K8s-Demo实现
Kubernates的基础界面 常用的操作 将创建好的yaml文件通过Create按钮创建所需资源项目. Dashbord: 可以通过Dashbord查看集群详情:cpu.memory.f ...
- JS 提升 p4
提示不多说,记住几个要点: 1.变量和函数都会提升,如下 a = 2; var a ; console.log(a); fn(); function fn(){ console.log(1); } 2 ...
- gulp常用插件汇总
1.gulp-sass 预编译 sass 文件为 css 文件,SASS 不多说,如果项目中有使用 sass ,那么这个插件应该是必备的.前面的一篇文章中,已经对该插件有所使用了,可配置编译后输出风格 ...
- 排序算法(2)--Insert Sorting--插入排序[2]--binary insertion sort--折半(二分)插入排序
作者QQ:1095737364 QQ群:123300273 欢迎加入! 1.基本思想 二分法插入排序的思想和直接插入一样,只是找合适的插入位置的方式不同,这里是按二分法找到合适的位置,可 ...
- sql server 大批数据插入时,时间过长的问题
private const string con = "server=192.168.30.36;database=test;user=sa;pwd=123456"; static ...
- hadoop重启后,hdfs目录权限问题
今天重启了下Hadoop集群,使用Eclipse调试hdfs api的时候报错: [WARNING] java.lang.NullPointerException at org.conan.kafka ...
- ActiveReports 报表控件V12新特性 -- 无需ETL处理,即可实现跨数据源分析数据
ActiveReports是一款专注于 .NET 平台的报表控件,全面满足 HTML5 / WinForms / ASP.NET / ASP.NET MVC / WPF 等平台下报表设计和开发工作需求 ...
- java EE 监听器
生命周期监听器与属性改变监听器都必须使用@WebListener或在web.xml中声明,容器才会知道要加载.读取相关的监听器.