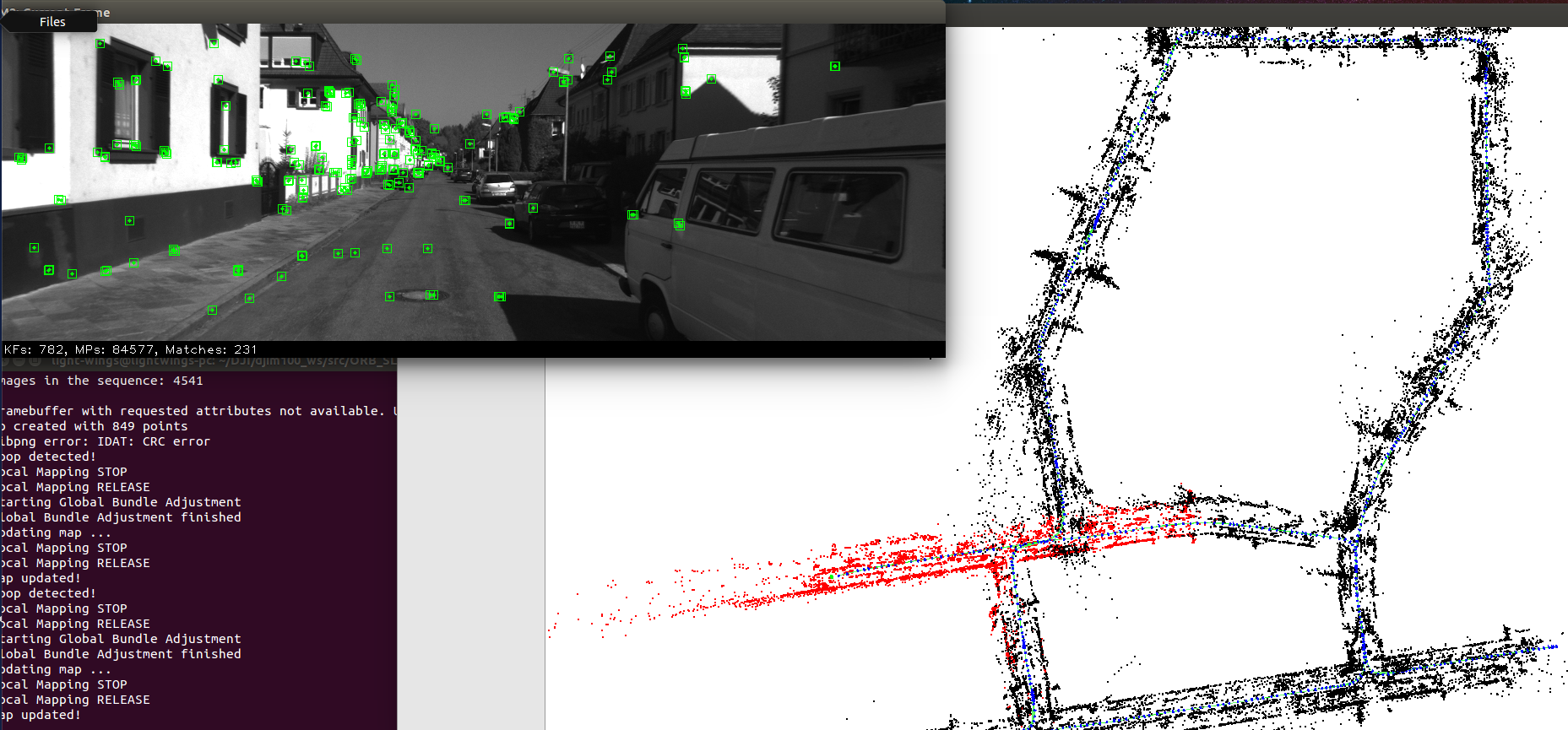
ORB-SLAM2(4) 离线双目数据测试
官网 https://github.com/raulmur/ORB_SLAM2
1从http://www.cvlibs.net/datasets/kitti/eval_odometry.php下载数据集(灰度图像)
百度网盘:
进入
进入00

进入image_0
2 执行以下命令.
官方说明:
2.1 根据测试的数据,KITTIX.yaml分别替换成KITTI00-02.yaml,KITTI03.yaml或KITTI04-12.yaml。
2.2 更改PATH_TO_DATASET_FOLDER未压缩的数据集文件夹。更改SEQUENCE_NUMBER为00,01,02,...,11。
官方运行命令
./Examples/Stereo/stereo_kitti Vocabulary/ORBvoc.txt Examples/Stereo/KITTIX.yaml PATH_TO_DATASET_FOLDER/dataset/sequences/SEQUENCE_NUMBER
自己说明:
这里我是使用的是00文件夹的测试数据.
对应相机参数文件 KITTI00-02.yaml
词袋模型是自带的 ORBvoc.txt
把这三个文件分别放在./Examples/Stereo/stereo_kitti下
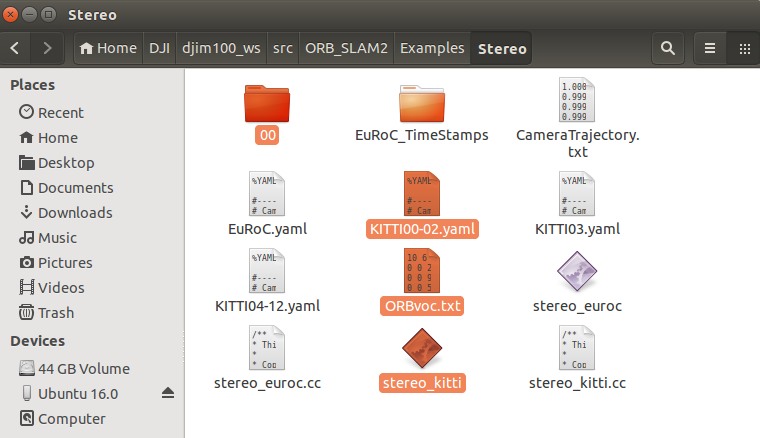
直接运行命令:
进入 目录下
目录下
./stereo_kitti ORBvoc.txt KITTI00-02.yaml 00

ORB-SLAM2(4) 离线双目数据测试的更多相关文章
- orb slam2 双目摄像头
主要参考了http://blog.csdn.net/awww797877/article/details/51171099这篇文章,其中需要添加的是:export ROS_PACKAGE_PATH=$ ...
- ORB SLAM2在Ubuntu 16.04上的运行配置
http://www.mamicode.com/info-detail-1773781.html 安装依赖 安装OpenGL 1. 安装opengl Library$sudo apt-get inst ...
- 关于ORB SLAM2资源整理(持续更新)
ORB SLAM2源码讲解(吴博) https://www.youtube.com/watch?v=2GVE7FTW7AU 泡泡机器人视频整理: http://space.bilibili.com/3 ...
- ORB SLAM2 学习笔记
cd ~/Documents/demos/ORB_SLAM2 ./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.y ...
- Ubuntu14.04 使用本地摄像头跑ORB SLAM2(暂未完成)
嗯 这个方法我暂时弄不出来,用了另外一个方法:SLAM14讲 第一次课 使用摄像头或视频运行 ORB-SLAM2 前面的准备: Ubuntu14.04安装 ROS 安装步骤和问题总结 Ubuntu14 ...
- orb slam2
- 使用 evo 工具评测 VI ORB SLAM2 在 EuRoC 上的结果
http://www.liuxiao.org/2017/11/%E4%BD%BF%E7%94%A8-evo-%E5%B7%A5%E5%85%B7%E8%AF%84%E6%B5%8B-vi-orb-sl ...
- Ubuntu16.04+Ros+Usb_Cam ORB SLAM2
转载自:https://www.jianshu.com/p/dbf39b9e4617亲测可用 1.其中编译ORB_SLAM2的 ./build.sh 和 ./build_ros.sh之前需要修改文 ...
- ORB-SLAM2:一种开源的VSLAM方案(译文)
摘要: ORB-SLAM2是基于单目,双目和RGB-D相机的一套完整的SLAM方案.它能够实现地图重用,回环检测和重新定位的功能.无论是在室内的小型手持设备,还是到工厂环境的无人机和城市里驾驶的汽车, ...
随机推荐
- Dynamics CRM 2016/365 窗体中添加按钮
一.工具下载,及界面介绍 1.下载XrmToolBox工具(XrmToolBox for Microsoft Dynamics CRM/365 CE) 链接:https://www.xrmtoolbo ...
- Windows环境使用Nexus-3.x搭建Maven私服
[前言] 本文主要讲解在Wiindows环境下搭建最新出的Nexus 3.x私服. 1.搭建私服的必要性 一般情况下,各个公司的开发团队为了提高开发效率,都会使用项目构建工具进行开发.常见的构建工具有 ...
- [PHP] 算法-两个n位的二进制整数相加问题PHP实现
两个n位二进制数分别存储在两个n元数组A和B中,这两个整数的和存在一个n+1元的数组C中答:此问题主要是考察相加进位的问题,元素1+1 =0 并且往前进一位ADD-BINARY(A,B) C=new ...
- javascript如何处理很多数据,类似分页切换
需求:一个用户列表数据,如果对应列表数据大于10个,就每10个保存到二维数组,后面不足10个的依然放在二维数组尾部 用处:模拟分页,或者局部刷新 在线DEMO:戳这里 var obj=[ { &quo ...
- 移动端FastClick和editor冲突问题。
FastClick.prototype.needsClickForParent = function (target) { let parent = target.parent ...
- Servlet—Cookie(显示用户上次访问时间、显示商品浏览历史)
1 . 什么是会话? 会话可简单理解为:用户开一个浏览器,点击多个超链接,访问服务器多个web资源,然后关闭浏览器,整个过程称之为一个会话. 1.1 会话过程中要解决的一些问题? 每个用户在使用浏览器 ...
- 使用bootstrap的JS插件实现模态框效果
在上一篇文章中,我们使用 js+css 实现了模态框效果,在理解了模态框的基本实现方法和实现效果后,我们就要寻找更快捷的方法,又快又好的来完成模态框开发需求,从而节约时间,提高效率.一个好的轮子,不仅 ...
- 西安OpenParty11月29日活动高清图文回顾——新增西安APEC蓝美图!
本次活动由西安OpenParty负责线下活动组织运营,线上由InfoQ-QClub.OSChina协办. OSChina活动召集帖:运维为王——应用系统.DevOps与Docker(11月29日) I ...
- spring使用BeanPostProcesor实现AOP源码分析
源码 AbstractApplicationContext#public void refresh() throws BeansException, IllegalStateException { f ...
- LeetCode题解之Insert into a Binary Search Tree
1.题目描述 2.分析 插入算法. 3.代码 TreeNode* insertIntoBST(TreeNode* root, int val) { insert(root, val); return ...