学习OpenCV双目测距原理及常见问题解答
学习OpenCV双目测距原理及常见问题解答
转自博客:https://blog.csdn.net/angle_cal/article/details/50800775
一. 整体思路和问题转化.
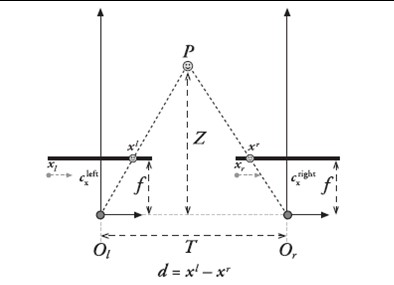
图1. 双摄像头模型俯视图
图1解释了双摄像头测距的原理,书中Z的公式如下: 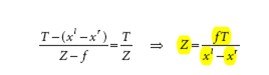
在OpenCV中,f的量纲是像素点,T的量纲由定标棋盘格的实际尺寸和用户输入值确定,一般总是设成毫米,当然为了精度提高也可以设置为0.1毫米量级,d=xl-xr的量纲也是像素点。因此分子分母约去,z的量纲与T相同 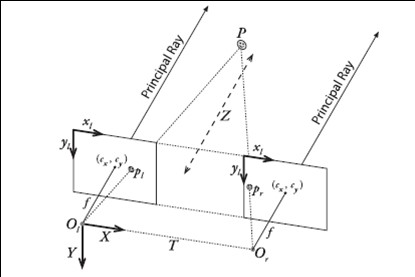
图2, 双摄像头模型立体视图
图2解释了双摄像头获取空间中某点三维坐标的原理。
注意,左镜头光心是世界坐标系的原点,该坐标系是左手屏幕坐标系,所以在该点上方,前方的物体,他的世界坐标中,Y是负数. 
可以看到,实际的坐标计算利用的都是相似三角形的原理,其表达式就如同Q矩阵所示。空间中某点的三维坐标就是(X/W, Y/W, Z/W)。所以,得到了Q矩阵,就是得到了一个点的世界坐标.
因此,为了精确地求得某个点在三维空间里的距离,我们需要获得的参数有焦距f、视差d、摄像头中心距Tx。如果还需要获得X坐标和Y坐标的话,那么还需要额外知道左右像平面的坐标系与立体坐标系中原点的偏移cx和cy。
要测距,就又有这五个参数.
f, Tx, cx和cy可以通过立体标定获得初始值,并通过立体校准优化,使得两个摄像头在数学上完全平行放置,并且左右摄像头的cx, cy和f相同(也就是实现下图中左右视图完全平行对准的理想形式)。 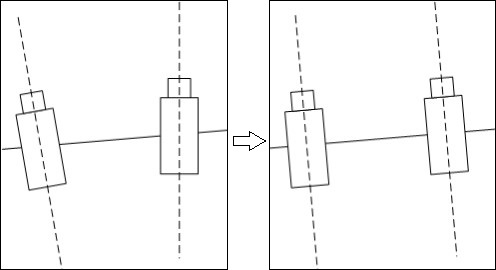
立体匹配所做的工作,就是在之前的基础上,求取最后一个变量:视差d(这个d一般需要达到亚像素精度)。从而最终完成求一个点三维坐标所需要的准备工作。
总结:使用OpenCV进行的立体视觉测距,其实思路是这样的:根据摄像头的成像原理(表现为小孔成像等效模型)和具体设备的成像特性(表现为光心距离,两个焦距,两个镜头安装的相对位置),设法建立像和真实世界的映射关系(表现为上述五个参数),并以摄像机系统为参考系,为真实世界建立绝对坐标系(该坐标系的具体形式请看下文),通过上述映射关系,该方法能够把像点所在的世界坐标位置求解出来,实现距离测量.
在清楚了上述原理之后,我们也就知道了,所有的这几步:标定、校准和匹配,都是围绕着如何更精确地获得f, d, Tx, cx和cy而设计的。
二. OpenCV2.4.11的实现.
按照上述解释,步骤是这样的:
1.准备工作:依次完成:标定->校准->匹配这三个操作,获得所需的参数:
T_x,f,d, C_x, C_y.其中,标定和校准的目的是求解Q矩阵,匹配的目的是求解视差值d. 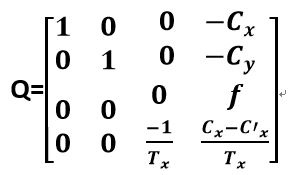
2. 通过某种手段,获得待测点在”像世界”中的坐标(x.y),构造向量: 
3. 通过Q•W运算,得到世界坐标向量,进而计算距离.
4. 具体实现步骤:
(1)标定和矫正
函数 findChessboardCorners()以标定盘图片和标定盘参数为输入,得到立体标定的输入参数;
函数:stereoCalibrate()输出变量:
R – Output rotation matrix (旋转)
T – Output translation vector(平移)
E – Output essential matrix.(本征)
F – Output fundamental matrix.(基础)
函数:stereoRectify()的输入变量已经从上面得到,他的输出变量如下:
R1 – Output 3x3 rectification transform (rotation matrix) for the first camera.
R2 – Output 3x3 rectification transform (rotation matrix) for the second camera.
P1 – Output 3x4 projection matrix in the new (rectified) coordinate systems for the first camera.
P2 – Output 3x4 projection matrix in the new (rectified) coordinate systems for the second camera.
Q – Output disparity-to-depth mapping matrix
(2)匹配
OpenCV2.4.11中提供了若干种匹配方法,这里采用的是BM,SGBM,VAR算法,这三个算法在使用的时候都需要构造相应的对象,对其中的输入属性进行设置,利用其提供的”()”操作符的重载执行相关的算法.他们都要求输入左右视图,输出视差图,具体情况如下:
SGBM: left – Left 8-bit single-channel or 3-channel image.
right – Right image of the same size and the same type as the left one.
disp – Output disparity map. It is a 16-bit signed single-channel image of the same size as the input image. It contains disparity values scaled by 16. So, to get the floating-point disparity map, you need to divide each disp element by 16.
BM: left – Left 8-bit single-channel image.
right – Right image of the same size and the same type as the left one.
disparity – Output disparity map. It has the same size as the input images. When disptype==CV_16S, the map is a 16-bit signed single-channel image, containing disparity values scaled by 16. To get the true disparity values from such fixed-point representation, you will need to divide each disp element by 16. If disptype==CV_32F, the disparity map will already contain the real disparity values on output.
disptype – Type of the output disparity map, CV_16S (default) or CV_32F.
Var: left – Left 8-bit single-channel or 3-channel image.
right – Right image of the same size and the same type as the left one.
disp – Output disparity map. It is a 8-bit signed single-channel image of the same size as the input image.
输出统一以8位视差图计算,不是8位转换成8位.全部采用CV_16S制式.
(3)取得待测点的图像空间坐标值
这一步很简单,只需要设法获取图片上的某个点的坐标就可以,此坐标只是相对于图片本身而言,所以可以使用例如鼠标点击或输入坐标的方法
(4)已经得到了全部的数据,利用Q矩阵进行计算就可以了。
三.代码中的关键函数:
cvInitUndistortRectifyMap()函数是开源视觉库OpenCV的库函数。该函数是以C语言为基础编写的,而initUndistortRectifyMap()以C++语言为基础编写的。
函数体
参数说明
概述
函数体
参数解释
概述
OpenCV三种立体匹配求视差图算法总结:
首先我们看一下BM算法:
Ptr<StereoBM> bm = StereoBM::create(16,9);//局部的BM;
// bm算法
bm->setROI1(roi1);//左右视图的有效像素区域 在有效视图之外的视差值被消零
bm->setROI2(roi2);
bm->setPreFilterType(CV_STEREO_BM_XSOBEL);
bm->setPreFilterSize(9);//滤波器尺寸 [5,255]奇数
bm->setPreFilterCap(31);//预处理滤波器的截断值 [1-31]
bm->setBlockSize(SADWindowSize > 0 ? SADWindowSize : 15);//sad窗口大小
bm->setMinDisparity(0);//最小视差值,代表了匹配搜索从哪里开始
bm->setNumDisparities(numberOfDisparities);//表示最大搜索视差数
bm->setTextureThreshold(10);//低纹理区域的判断阈值 x方向导数绝对值之和小于阈值
bm->setUniquenessRatio(15);//视差唯一性百分比 匹配功能函数
bm->setSpeckleWindowSize(100);//检查视差连通域 变化度的窗口大小
bm->setSpeckleRange(32);//视差变化阈值 当窗口内视差变化大于阈值时,该窗口内的视差清零
bm->setDisp12MaxDiff(-1);// 1
该方法速度最快,一副320*240的灰度图匹配时间为31ms
第二种方法是SGBM方法这是OpenCV的一种新算法:
Ptr<StereoSGBM> sgbm = StereoSGBM::create(0,16,3);//全局的SGBM;
// sgbm算法
sgbm->setPreFilterCap(63);//预处理滤波器的截断值 [1-63]
int sgbmWinSize = SADWindowSize > 0 ? SADWindowSize : 3;
sgbm->setBlockSize(sgbmWinSize);
int cn = img0.channels();
sgbm->setP1(8*cn*sgbmWinSize*sgbmWinSize);// 控制视差变化平滑性的参数。P1、P2的值越大,视差越平滑。
//P1是相邻像素点视差增/减 1 时的惩罚系数;P2是相邻像素点视差变化值大于1时的惩罚系数。P2必须大于P1
sgbm->setP2(32*cn*sgbmWinSize*sgbmWinSize);
sgbm->setMinDisparity(0);//最小视差值,代表了匹配搜索从哪里开始
sgbm->setNumDisparities(numberOfDisparities);//表示最大搜索视差数
sgbm->setUniquenessRatio(10);//表示匹配功能函数
sgbm->setSpeckleWindowSize(100);//检查视差连通域 变化度的窗口大小
sgbm->setSpeckleRange(32);//视差变化阈值 当窗口内视差变化大于阈值时,该窗口内的视差清零
sgbm->setDisp12MaxDiff(-1);// 1
//左视图差(直接计算)和右视图差(cvValidateDisparity计算得出)之间的最大允许差异
if(alg==STEREO_HH) sgbm->setMode(StereoSGBM::MODE_HH);
else if(alg==STEREO_SGBM) sgbm->setMode(StereoSGBM::MODE_SGBM);
else if(alg==STEREO_3WAY) sgbm->setMode(StereoSGBM::MODE_SGBM_3WAY);
各参数设置如BM方法,速度比较快,320*240的灰度图匹配时间为78ms,
第三种为GC方法:
该方法速度超慢,但效果超好。四.FAQ:
Q1:标定时棋盘格的大小如何设定,对最后结果有没有影响?
A:当然有。在标定时,需要指定一个棋盘方格的长度,这个长度(一般以毫米为单位,如果需要更精确可以设为0.1毫米量级)与实际长度相同,标定得出的结果才能用于实际距离测量。一般如果尺寸设定准确的话,通过立体标定得出的Translation的向量的第一个分量Tx的绝对值就是左右摄像头的中心距。一般可以用这个来验证立体标定的准确度。比如我设定的棋盘格大小为270 (27mm),最终得出的Tx大小就是602.8 (60.28mm),相当精确。
Q2:通过立体标定得出的Tx符号为什么是负的?
A:这个其实我也不是很清楚。个人的解释是,立体标定得出的T向量指向是从右摄像头指向左摄像头(也就是Tx为负),而在OpenCV坐标系中,坐标的原点是在左摄像头的。因此,用作校准的时候,要把这个向量的三个分量符号都要换一下,最后求出的距离才会是正的。
但是这里还有一个问题,就是Learning OpenCV中Q的表达式,第四行第三列元素是-1/Tx,而在具体实践中,求出来的实际值是1/Tx。这里我和maxwellsdemon讨论下来的结果是,估计书上Q表达式里的这个负号就是为了抵消T向量的反方向所设的,但在实际写OpenCV代码的过程中,那位朋友却没有把这个负号加进去。(一家之言,求更详细的解释)
Q3:cvFindStereoCorrespondenceBM的视差输出结果单位是?
A:在OpenCV中,BM函数得出的结果是以16位符号数的形式的存储的,出于精度需要,所有的视差在输出时都扩大了16倍(2^4)。其具体代码表示如下:
dptr[y*dstep] = (short)(((ndisp - mind - 1 + mindisp)*256 + (d != 0 ? (p-n)*128/d : 0) + 15) >> 4);
可以看到,原始视差在左移8位(256)并且加上一个修正值之后又右移了4位,最终的结果就是左移4位
因此,在实际求距离时,cvReprojectTo3D出来的X/W,Y/W,Z/W都要乘以16 (也就是W除以16),才能得到正确的三维坐标信息
Q4:利用双摄像头进行测距的时候世界坐标的原点究竟在哪里?
A:世界坐标系的原点是左摄像头凸透镜的光心。
说起这个,就不得不提到针孔模型。如图3所示,针孔模型是凸透镜成像的一种简化模型。当物距足够远时(远大于两倍焦距),凸透镜成像可以看作是在焦距处的小孔成像。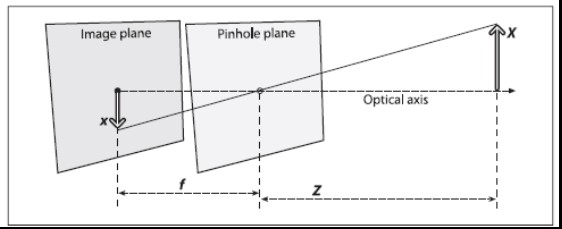
在实际计算过程中,为了计算方便,我们将像平面翻转平移到针孔前,从而得到一种数学上更为简单的等价形式(方便相似三角形的计算),如下图所示。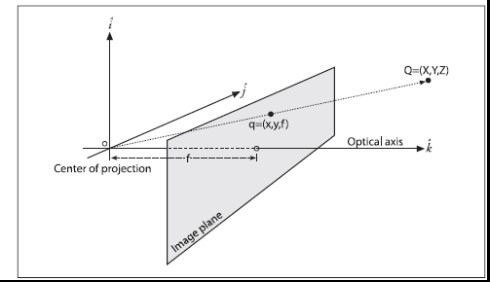
因此,对应图2就可以知道,世界坐标系原点就是左摄像头针孔模型的针孔,也就是左摄像头凸透镜的光心
Q5:f和d的单位是像素,那这个像素到底表示什么,它与毫米之间又是怎样换算的?
A:这个问题也与针孔模型相关。在针孔模型中,光线穿过针孔(也就是凸透镜中心)在焦距处上成像,因此,图3的像平面就是摄像头的CCD传感器的表面。每个CCD传感器都有一定的尺寸,也有一定的分辨率,这个就确定了毫米与像素点之间的转换关系。举个例子,CCD的尺寸是8mm X 6mm,分辨率是640X480,那么毫米与像素点之间的转换关系就是80pixel/mm。
在实际运用中,我们在数学上将这个像平面等效到小孔前(图4),这样就相当于将在透镜中心点之前假设了一块虚拟的CCD传感器。
Q6:为什么cvStereoRectify求出的Q矩阵cx, cy, f都与原来的不同?
A:这个在前文有提到过。在实际测量中,由于摄像头摆放的关系,左右摄像头的f, cx, cy都是不相同的。而为了使左右视图达到完全平行对准的理想形式从而达到数学上运算的方便,立体 校准所做的工作事实上就是在左右像重合区域最大的情况下,让两个摄像头光轴的前向平行,并且让左右摄像头的f, cx, cy相同。因此,Q矩阵中的值与两个instrinsic矩阵的值不一样就可以理解了。
相关网址:
opencv双目测距实现:https://cloud.tencent.com/developer/article/1082064
initUndistortRectifyMap:http://www.voidcn.com/article/p-qyftgzxl-brg.html
真实场景的双目立体匹配(Stereo Matching)获取深度图详解——最终得到深度图像并且填充:https://www.cnblogs.com/riddick/p/8486223.html
OpenCV畸变校正原理以及损失有效像素原理分析:https://www.cnblogs.com/riddick/p/6711263.html
github双目相关理论与实践:https://github.com/melodybinbin/MVision/tree/master/stereo
学习OpenCV双目测距原理及常见问题解答的更多相关文章
- 学习笔记:使用opencv做双目测距(相机标定+立体匹配+测距).
最近在做双目测距,觉得有必要记录点东西,所以我的第一篇博客就这么诞生啦~ 双目测距属于立体视觉这一块,我觉得应该有很多人踩过这个坑了,但网上的资料依旧是云里雾里的,要么是理论讲一大堆,最后发现还不知道 ...
- 双目相机标定以及立体测距原理及OpenCV实现
单目相机标定的目标是获取相机的内参和外参,内参(1/dx,1/dy,Cx,Cy,f)表征了相机的内部结构参数,外参是相机的旋转矩阵R和平移向量t.内参中dx和dy是相机单个感光单元芯片的长度和宽度,是 ...
- web前端工程师面试技巧 常见问题解答
web前端工程师面试技巧 常见问题解答 每年的春招是各企业需求人才的黄金时期,不少的前端大牛或者前端新手在面试时候不知道怎么来回答面试官的问题,下面来看下我转载的这篇文章吧,希望对从事前端工作的你有所 ...
- 学习OpenCV研究报告指出系列(二)源代码被编译并配有实例project
下载并安装CMake3.0.1 要自己编译OpenCV2.4.9的源代码.首先.必须下载编译工具,使用的比較多的编译工具是CMake. 以下摘录一段关于CMake的介绍: CMake是一个 ...
- Delphi XE5 常见问题解答
Delphi XE5 常见问题解答 有关于新即时试用的问题吗?请看看 RAD Studio 即时试用常见问答. 常见问题 什么是 Delphi? Embarcadero? Delphi? XE5 是易 ...
- SSL/TLS 高强度加密: 常见问题解答
关于这个模块 mod_ssl 简史 mod_ssl会受到Wassenaar Arrangement(瓦森纳协议)的影响吗? mod_ssl 简史 mod_ssl v1 最早在1998年4月由Ralf ...
- 《学习OpenCV》中求给定点位置公式
假设有10个三维的点,使用数组存放它们有四种常见的形式: ①一个二维数组,数组的类型是CV32FC1,有n行,3列(n×3) ②类似①,也可以用一个3行n列(3×n)的二维数组 ③④用一个n行1列(n ...
- 学习opencv中文版教程——第二章
学习opencv中文版教程——第二章 所有案例,跑起来~~~然而并没有都跑起来...我只把我能跑的都尽量跑了,毕竟看书还是很生硬,能运行能出结果,才比较好. 越着急,心越慌,越是着急,越要慢,越是陌生 ...
- 【从零学习openCV】IOS7下的人脸检測
前言: 人脸检測与识别一直是计算机视觉领域一大热门研究方向,并且也从安全监控等工业级的应用扩展到了手机移动端的app,总之随着人脸识别技术获得突破,其应用前景和市场价值都是不可估量的,眼下在学习ope ...
随机推荐
- 解决Maven 编译出的jar中没有主清单属性
出现这个问题的原因是 pom 中没有添加主程序入口 在配置中添加如下配置 <plugin> <groupId>org.apache.maven.plugins</grou ...
- netcat瑞士军刀实现电脑远程控制termux
关于nc实现远程控制termux 1.首先termux安装namp pkg install namp 2.windows系统安装netcat 此为netcat下载连接 下载得到zip压缩包,解压得到里 ...
- MySQL增删查改语句(入门)
目录 create alter: insert delete update select 数据库定义语句: create:创建数据库及表对象 drop:删除数据库及表对象 alter:修改数据库及表对 ...
- poi 读取word 遍历表格和单元格中的图片
背景 项目需要解析word表格 需要批量导入系统,并保存每行信息到数据库 并且要保存word中的图片, 并保持每条信息和图片的对应关系 一行数据可能有多条图片 解决办法 没有找到现成的代码,怎么办呐? ...
- uboot中setenv和saveenv分析
转:https://blog.csdn.net/weixin_34355715/article/details/85751477 Env在u-boot中通常有两种存在方式,在永久性存储介质中(flas ...
- P1736 创意吃鱼法[二维dp]
题目背景 感谢@throusea 贡献的两组数据 题目描述 回到家中的猫猫把三桶鱼全部转移到了她那长方形大池子中,然后开始思考:到底要以何种方法吃鱼呢(猫猫就是这么可爱,吃鱼也要想好吃法 ^_*).她 ...
- springboot的入门
SpringBoot SpringBoot是SpringMVC的升级版,简化配置,很可能成为下一代的框架 1.新建项目 怎么创建springBoot项目呢? 创建步骤复杂一点点 New Project ...
- 2019-2020-1 20199312《Linux内核原理与分析》第二周作业
c语言代码 // main.c int g(int x) { return x + 4; } int f(int x) { return g(x); } int main(void) { return ...
- django rest framework框架中都有那些组件
1.权限 2.认证 3.访问频率 4.序列化 5.路由 6.视图 7.分页 8.解析器 9.渲染器 规定页面显示的效果(无用) https://www.cnblogs.com/Rivend/p/118 ...
- Java中String、StringBuilder和StringBuffer
StringBuilder和StringBuffer内部都是通过char[]来实现的.(jdk1.9后,底层把char 数组变成了byte[].)唯一不同的就是我们的StringBuffer内部操作方 ...