模糊控制——(3)模糊自适应整定PID控制
1、原理
这种控制必须精确地确定对象模型,首先将操作人员(专家)长期实践积累的经验知识用控制规则模型化,然后运用推理便可对PID参数实现最佳调整。
自适应模糊PID控制器以误差e和误差变化ec作为输入,可以满足不同时刻的e和ec对PID参数自整定的要求。利用模糊控制规则在线对PID参数进行修改,便构成了自适应模糊PID控制器,其结构如图4-17所示。
离散PID控制算法为:

式中, k为采样序号,T 为采样时间。

PID参数模糊自整定是找出PID三个参数 Kp, Ki, Kd 与e和ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制原理来对3个参数进行在线修改,以满足不同e和ec时对控制参数的不同要求,而使被控对象有良好的动、静态性能。
从系统的稳定性、响应速度、超调量和稳态精度等各方面来考虑, Kp, Ki, Kd的作用如下:
(1)比例系数Kp的作用是加快系统的响应速度,提高系统的调节精度。 Kp越大,系统的响应速度越快,系统的调节精度越高,但易产生超调,甚至会导致系统不稳定。 Kp取值过小,则会降低调节精度,使响应速度缓慢,从而延长调节时间,使系统静态、动态特性变坏。
(2)积分作用系数 Ki的作用是消除系统的稳态误差。 Ki越大,系统的静态误差消除越快,但Ki过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调。若 Ki过小,将使系统静态误差难以消除,影响系统的调节精度。
(3)微分作用系数Kd的作用是改善系统的动态特性,其作用主要是在响应过程中抑制偏差向任何方向的变化,对偏差变化进行提前预报。但Kd过大,会使响应过程提前制动,从而延长调节时间,而且会降低系统的抗干扰性能。
以PI参数整定为例,必须考虑到在不同时刻两个参数的作用以及相互之间的互联关系。模糊自整定PI是在PI算法的基础上,通过计算当前系统误差e和误差变化率ec,利用模糊规则进行模糊推理,查询模糊矩阵表进行参数调整。
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,得到针对Kp, Ki两个参数分别整定的模糊控制表。
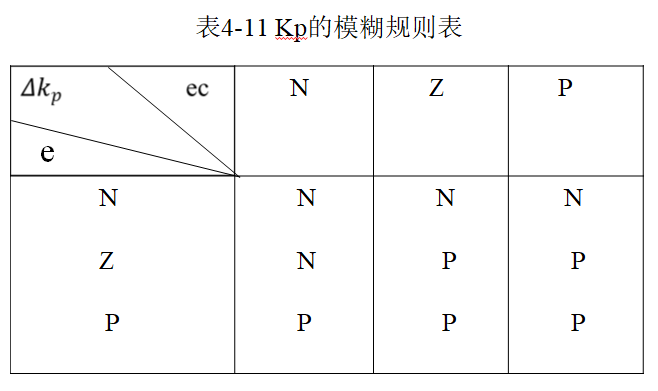
(1) Kp的模糊整定规则表(见表4-11)
(2)Ki的模糊整定规则表(见表4-12)

Kp,Ki的模糊控制规则表建立好后,可根据如下方法进行自适应校正。将系统误差e和误差变化率ec变化范围定义为模糊集上的论域。
其模糊子集为 e,ec={N,O,P},子集中元素分别代表负,零,正。设e、ec和两个系数均服从正态分布,因此可得出各模糊子集的隶属度,根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PI参数的模糊矩阵表,查出修正参数代入下式计算。

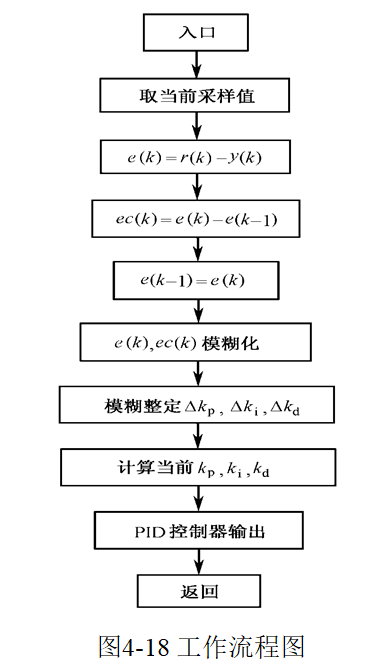
在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运 算,完成对PID参数的在线自校正。其工作流程图如图4-18所示。
模糊控制——(3)模糊自适应整定PID控制的更多相关文章
- PID控制及整定算法
一.PID控制算法 PID是比例.积分.微分的简称,PID控制的难点不是编程,而是控制器的参数整定.参数整定的关键是正确地理解各参数的物理意义,PID 控制的原理可以用人对炉温的手动控制来理解.阅读本 ...
- 通俗理解 模糊自适应PID
模糊自适应PID算法就是在经典的PID的基础上添加模糊控制规则库,建立这个库的目的就是算法能够自己来进行改变P.I.D的值. 就拿温度的上升过程控制来说,刚开始的时候,希望温度能够快速的升到终点温度, ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——5.底盘PID控制参数整定
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
- PID控制最通俗的解释与PID参数的整定方法
转自->这里 PID是比例.积分.微分的简称,PID控制的难点不是编程,而是控制器的参数整定.参数整定的关键是正确地理解各参数的物理意义,PID控制的原理可以用人对炉温的手动控制来理解.阅读本文 ...
- STM32L476应用开发之七:流量的PID控制
在气体分析仪使用过程中,为了力求分析结果的准确性,一般要求通过的气体流量尽可能的稳定.为了保证流量控制的稳定,我们采用PID调节来控制气路阀门的开度. 1.硬件设计 我们采用的流量计为气体质量流量计, ...
- 经典PID控制及应用体会总结
经典PID控制及应用体会总结 PID控制原理 PID是一种线性控制器,它根据给定值rin(t)与实际输出值yout(t)构成控制方案: 重点关注相关算法是如何对偏差进行处理的: PID控制器各校正环节 ...
- STM32—PID控制在直流电机中的应用
文章目录 一.PID控制算法 1.什么是PID 2.PID系数的理解 Ⅰ.比例(P)部分 Ⅱ.积分(I)部分 Ⅲ.微分(D)部分 3.PID的数字化处理 二.位置闭环控制 三.速度闭环控制 一.PID ...
- 【iCore3应用开发平台】发布 iCore3 应用开发平台PID控制代码
说明:1.本代码包包含FPGA和STM32F407两部分内容2.FPGA工程为出厂代码FPGA工程,版本为REV43.STM32F407为只含PID控制的ARM工程4.在使用风扇过程中,请勿将手伸入扇 ...
- 两轮自平衡小车双闭环PID控制设计
两轮自平衡小车的研究意义 ...
随机推荐
- 统计SQL Server所有表记录数
SELECT SCHEMA_NAME(t.schema_id) AS [schema] ,t.name AS tableName ,i.rows AS [rowCount] FROM sys.tabl ...
- 【PyQt5 学习记录】010:QSplitter
import sys from PyQt5.QtWidgets import (QApplication, QWidget, QSplitter, QTextEdit, QPushButton, QL ...
- LeetCode 536----Construct Binary Tree from String
536. Construct Binary Tree from String You need to construct a binary tree from a string consisting ...
- angularjs -- 路由监听
前几天,项目在做一个功能时需要在页面切换之前关闭正在执行的函数.尝试了几种方式都不行,最后想到既然angularjs是通过理由切换页面,那就在路由上面做文章吧.AngularJS在路由发生改变时,可以 ...
- oracle 企业管理器及无线网环境下配置方法
注意: oracle em 的访问地址在 D:\oracle\product\11.2.0\dbhome_1\install 下的文件里. 如果在windows 安装oracle,并且在本地访问,or ...
- Pig类型转换
users.data的内容如下: lisg 28 75 dengsl 24 88 强制类型转换 users = load '/users.data' fehed = foreach users gen ...
- java笔记--关于多线程如何查看JVM中运行的线程
查看JVM中的线程 --如果朋友您想转载本文章请注明转载地址"http://www.cnblogs.com/XHJT/p/3890280.html "谢谢-- ThreadGrou ...
- 【Kettle】8、变量参数传递介绍
本文为转载,感觉作者的辛勤劳作:http://blog.csdn.net/rotkang/article/details/21008271 ------------------------------ ...
- uml各类图
原文:http://www.cnblogs.com/way-peng/archive/2012/06/11/2544932.html 一.UML是什么?UML有什么用? 二.UML的历史 三.UML的 ...
- 通过ffplay实现摄像头preview
通过ffplay实现摄像头preview 硬件平台:Jetson TK1 开发板(NVIDIA Tegra K1 Mobile Processor 32bit),宁波舜宇光电SP103A(OV1682 ...