某科学的PID算法学习笔记
最近,在某社团的要求下,自学了PID算法。学完后,深切地感受到PID算法之强大。PID算法应用广泛,比如加热器、平衡车、无人机等等,是自动控制理论中比较容易理解但十分重要的算法。
下面是博主学习过程中所做的笔记,笔记后面提供了4种编程语言的仿真代码(C, C++, Python, Matlab),使实现方式更加灵活,同时增强对PID的理解。(文章较长,可点击右侧目录选择性阅读)

PID算法学习笔记
参考:PID基础入门教程
一、位式控制算法
1.1 位式控制算法原理
位式控制算法,通过比较SV(设定值)和PV(当前值),输出高低电平给执行部件,执行部件(如开关)通过执行/停止来控制目标(如加热器),控制对象通过传感器将当前值反馈给控制算法,如图1。
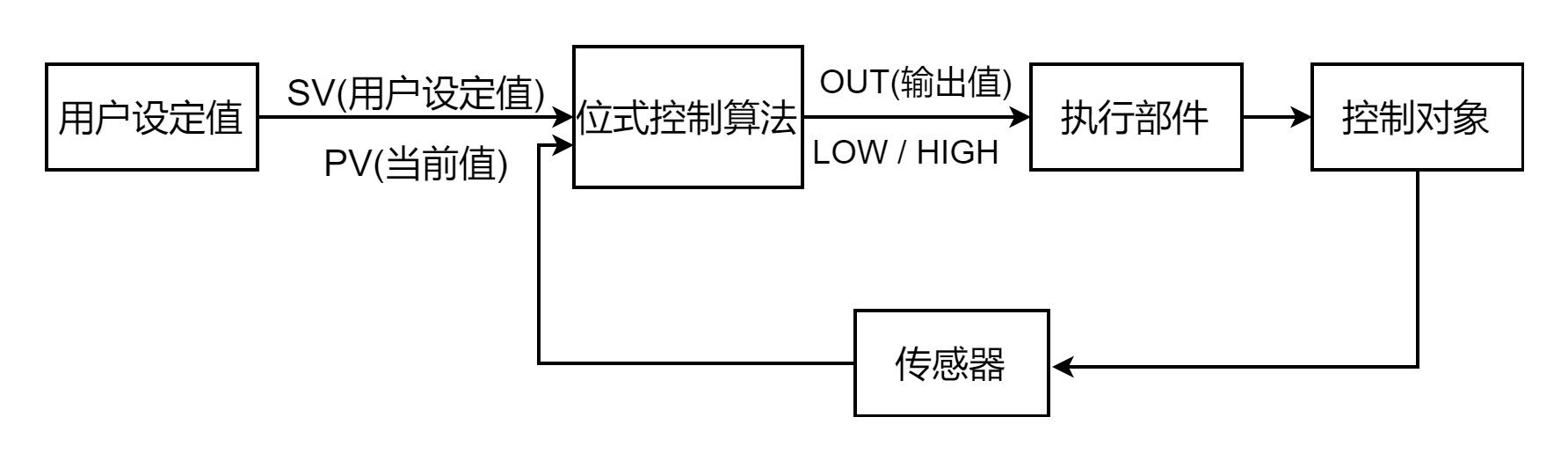
图1 位式控制算法简单应用
1.2 位式控制算法特点
位式控制算法具有如下特点:
(1)输出信号一般只有两种状态(LOW / HIGH)。
(2)通过比较SV和PV的值来产生OUT值,比如PV < SV输出高电平,PV > SV输出低电平。
(3)只比较控制对当前的状态值。
1.3 位式控制算法缺陷
位式控制算法的缺陷:
(1)输出信号单一,缺乏包容性。
(2)仅仅活在当下,没有回顾历史和展望未来。
二、PID控制算法
2.1 PID算法原理
PID控制算法,通过分析PV与SV的偏差值(包括当前偏差、历史偏差、最近偏差),输出值(PWM)经过执行器转换后应用于控制对象,控制对象通过传感器将PV反馈给PID,通过硬件寄存器等记录偏差值,以便PID随时调用,如图2。
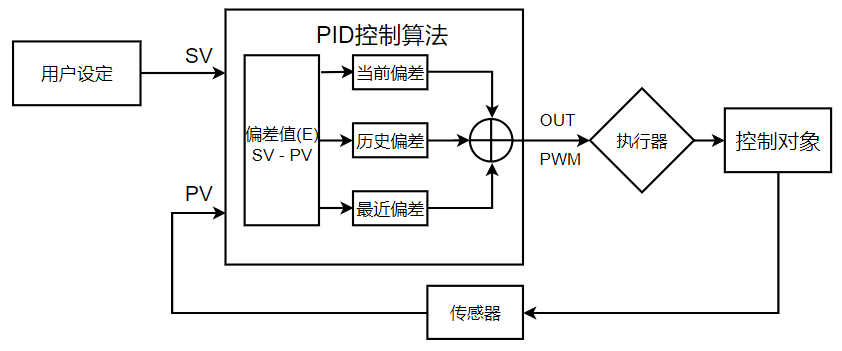
图2 PID控制算法简单应用
假设从“0”时刻到 k 时刻,传感器获取的状态值分别为
${X_{0}, X_{1}, X_{2}, ..., X_{k-1}, X_{k}}$
2.2 PID比例控制
在2.1的条件下,设偏差值 Ek 为设定值与当前值之差,即
${E_{k}=SV-X_{k}}$
实际应用中的偏差值存在如下3种情况

分析以上三种情况,不同情况下算法将输出不同值。比如算法在Ek > 0时输出较高的值,以促进当前值接近设定值。而实际应用中,控制对象的状态偏差值一般不能直接作为PWM输出值,需要进行一定比例的放大或缩小,以提高控制灵敏度。因此输出值满足关系式
${P_{out}=K_{p}\cdot E_{k}+OUT_{0}}$ ①
其中,POUT为输出值,一般与PWM有关。Kp 为比例系数,对偏差值Ek 进行一定比例的放大或缩小。OUT0 是当偏差值为 0 时,算法的输出值,防止负载失控。分析公式可知,偏差值Ek 越大,输出值越大,当前值接近设定值的速度越快,当前值超过设定值时,Ek < 0, 算法输出负值,当前值减小。往复循环,直到当前值稳定在设定值的误差允许范围内。
2.3 PID积分控制
在2.2的条件下,将历史偏差相加,其和为
${S_{k}=E_{0}+E{1}+E_{2}+...+E_{k-1}+E_{k}}$
实际应用中的历史偏差值之和存在如下3种情况
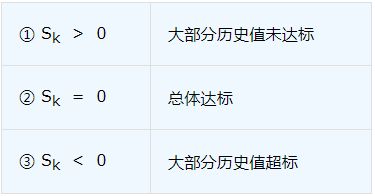
不同情况下输出值应不同,分析以上情况,可以令输出值满足关系式
${I_{out}=K_{p}\cdot S_{k}+OUT_{0}}$ ②
其中Iout为输出值,Kp为比例系数,Sk为历史偏差和,OUT0为初始值。通过上述算法,可以对控制对象的历史状态值进行评估,根据历史状态判断输出值的大小。这种方法比较局限,因为当历史值较多时,当前值的变化将很难引起输出值改变,因此积分控制一般不会从0开始启动,当当前值接近设定值时才开启积分控制,以减少参考的历史值。
2.4 PID微分控制
在2.2的条件下,将最近两次偏差值相减,其差为
${D_{k}=E_{k}-E_{k-1}}$
实际应用中的最近偏差值之差存在如下3种情况
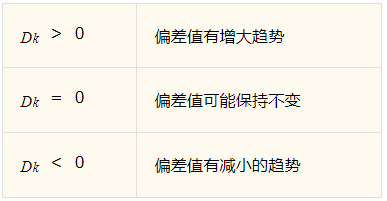
不同情况下输出值应不同,分析以上情况,可以令输出值满足关系式
${D_{out}=K_{p}\cdot D_{k}+OUT_{0}}$ ③
其中Dout为输出值,Kp为比例系数,Sk为历史偏差和,OUT0为初始值。通过最近偏差值之差,判断偏差值的变化趋势,预测未来的偏差值大小,从而输出对应的PWM。
2.5 PID算法模型
根据以上分析,每种控制算法均有较大局限。因此综合①②③算法,令输出值为
${PID_{out_{k}}=P_{out}+I_{out}+D_{out}}$
代入①②③关系式,并进行简单归并,得到关系式
${PID_{out_{k}}=K_{p}\cdot \left ( E_{k}+S_{k}+D_{k}\right )+OUT_{0}}$ ④
分析上式中 Sk , Dk 的值,假设T为计算周期,即每次运行算法的时间间隔,Ti为积分时间常数,用于控制积分算法对输出值的影响因数,Td为微分时间常数,用于控制微分算法对输出值的影响。
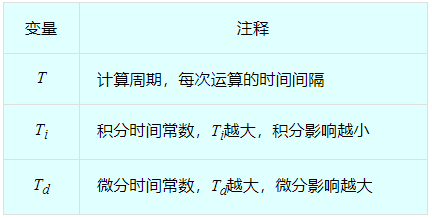
综上,积分控制Sk满足关系式
${S_{k}=\frac{1}{T_{i}}\cdot\sum_{k=0}^{k}E_{k} \cdot T}$ ⑤
微分控制Dk满足关系式
${D_{k}=T_{d}\cdot\frac{\left ( E_{k}-E_{k-1}\right )}{T}}$ ⑥
综合④⑤⑥,并进行简单的归并处理后,得到PID的输出关系式
${PID_{out_{k}}=P\left (K_{p}\cdot E_{k} \right )+I\left (K_{p}\cdot \frac{T}{T_{i}}\cdot \sum_{k=0}^{k}\cdot E_{k} \right )+D\left [K_{p}\cdot \frac{T_{d}}{T}\cdot\left(E_{k}-E_{k-1}\right) \right ]}$ ⑦
其中P,I,D分别表示比例,积分,微分控制。通过调整 Kp ,Ti ,Td 的值来调整P, I,D对输出值的影响权重,从而使当前值更快接近并稳定在设定值误差允许范围内。
上述算法有一个明显的特点,即计算结果输出为PWM值,直接控制负载。因此又被称为“位置式PID算法“
2.6 增量式PID算法
实际应用中,大部分控制系统具有记忆功能,可以记录每个时刻状态值,因此为了减小累加产生的运算负担,可以采用计算“增量”的方式来输出控制信号。
增量式PID算法的特点是只计算增加(减小)值,历史值加上增加值即为输出值,满足关系式
${\Delta PID_{out}=PID_{out_{k}}-PID_{out_{k-1}}}$ ⑧
代入④关系式,
${\Delta PID_{out}=P\left [K_{p}\cdot \left ( E_{k}-E_{k-1}\right ) \right ]+I\left (K_{p}\cdot \frac{T}{T_{i}}\cdot E_{k} \right )+D\left [K_{p}\cdot \frac{T_{d}}{T}\cdot \left ( E_{k}-2E_{k-1}-E_{k-2}\right ) \right ]}$ ⑨
对比⑧式和⑦式,⑧式运算量更小。因此对于有记忆功能的硬件系统,可以使用增量式PID算法,以减少运算,提升性能。

PID仿真实验
一、问题
既然是仿真实验,那就应该以模拟解决生活中的问题为主,为了进行比较具体,但不复杂的仿真实验,博主绞尽脑汁,终于构造了下面这个题目。
在《机甲大师》动漫中,主角“单单”拥有一架语音遥控的双旋翼无人机,名叫“KAKA"。如图1,动漫第一集5:35左右,KAKA在追踪飞盘时,突然受海风影响,飞行姿态偏离水平位置。性能超高的KAKA通过内部传感器测得偏角后,迅速调整姿态,恢复水平。请对这一情形进行建模分析。
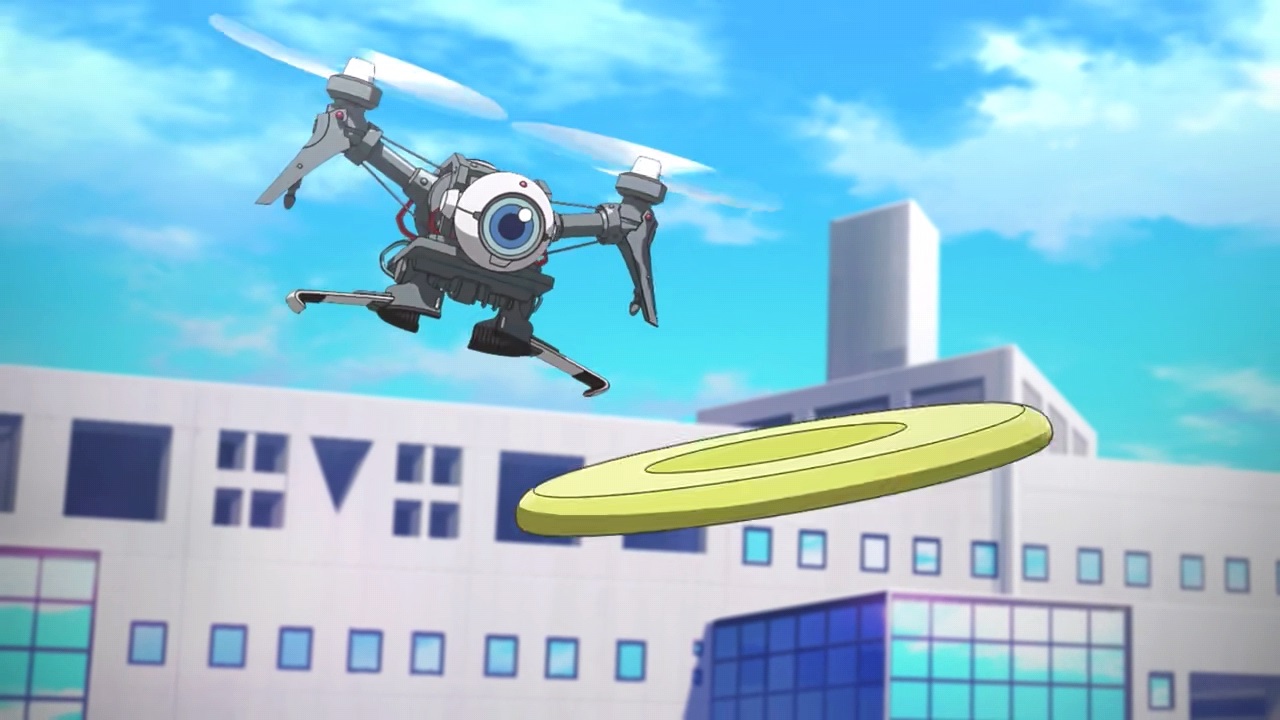
图1 被海风影响的KAKA
二、解答
分析题目,需要对KAKA“恢复姿态”这一现象进行分析。围绕这个问题,下面以“建立物理模型→建立数学模型→算法仿真”进行逐步分析。
2.1 建立物理模型
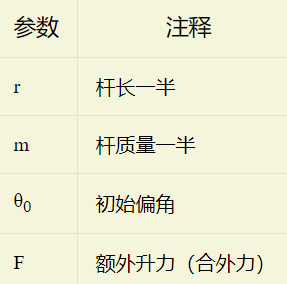
首先简化问题,将KAKA看作刚性直杆。如图2.1,一质量为2m,长度为2r的刚性直杆,两端垂直固定一个不计质量的直流电机。直杆可以绕中心自由旋转,初始位置相对水平线偏离θ角。
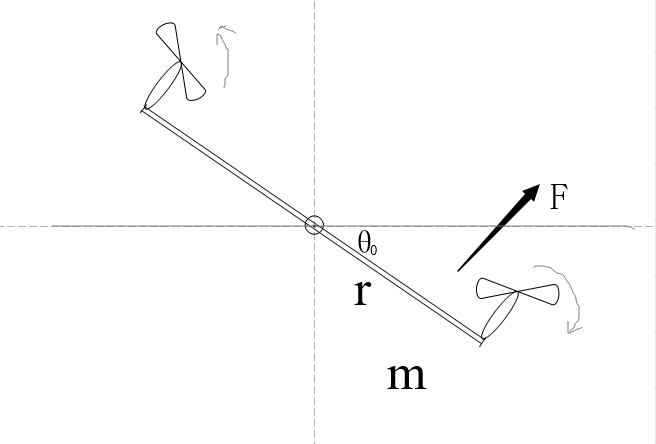
为了使直杆恢复水平位置,改变右端电机转速,产生“额外”升力F。
根据以上参数,在理想情况下,可以得到直杆的合外力矩M满足
${M = F\cdot r}$ ①
转动惯量J满足
${J=\frac{2}{3}mr^{2}}$ ②
由刚体轴转动定理
${M=J\cdot \alpha}$ ③
其中α为角加速度,满足关系式
${\alpha =\frac{\mathrm{d^2}\theta }{\mathrm{d} t^2}}$ ④
其中t为时间,联立①②③④,求解微分方程可得到关系式
${\theta _{t}=\frac{3\cdot F}{4\cdot m\cdot r}\cdot t^2}$ ⑤
其中θ为直杆在力合外力F的作用下,经过时间t后转动的角度。
2.2 建立数学模型
设${T}$为计算周期,在⑤式的条件下,令${t=T}$,在${T}$时间内直杆转动角度满足关系式
${\theta _{T} =\frac{3\cdot F}{4\cdot m\cdot r}\cdot T^2}$ ⑥
假设${F}$随时间的变化周期为${T}$,那么经过${t}$时间后,${F}$变化${n}$次,直杆转动角度满足
${\theta =\frac{3\cdot T^2}{4\cdot m\cdot r}\cdot\sum_{n=0}^{n} F_{n}}$ ⑦
直杆与水平线的当前偏差角${E_{k}}$满足
${E_{k}=\theta_{0}-\frac{3\cdot T^2}{4\cdot m\cdot r}\cdot\sum_{n=0}^{k} F_{n}}$ ⑧
上式即为直杆在恢复水平位置过程中,在合外力F作用下,当前偏角对于时间的函数。
参考实际情况,由于合外力以T为周期发生变化,该偏角函数曲线应如满足图2.2
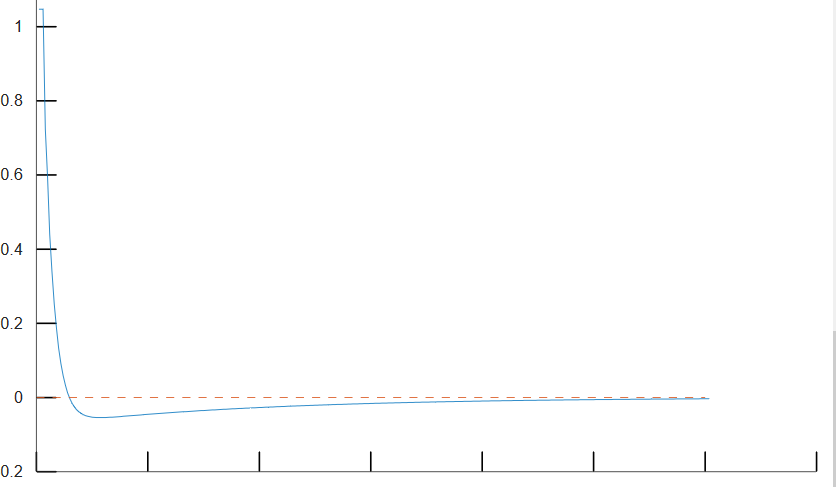
图2.2 (预测)直杆偏角对于时间的变化曲线
分析上图曲线,发现其变化趋势可以用PID算法进行拟合。
2.3 PID算法仿真
分析关系式⑧,其中${T}$可以看作采样周期,${F}$为算法输出值,${E_{k}}$为当前偏差角。应用位置式${PID}$算法,设比例系数为${K_{p}}$,积分时间常数为${T_{i}}$,微分时间常数为${T_{d}}$,输出值满足PID算法关系式
${F_{out_{k}}=K_{p}\cdot E_{k} +K_{p}\cdot \frac{T}{T_{i}}\cdot \sum_{k=0}^{k}\cdot E_{k} + K_{p}\cdot \frac{T_{d}}{T}\cdot E_{k}-E_{k-1}}$ ⑨
分析⑧式,为了简化计算,不妨令
${m = 0.3}$, ${r=0.1}$, ${\theta _{0}=\frac{\pi}{3}}$ (${SI}$)
则当前偏差角满足
${E_{k}=\frac{\pi}{3}-25\cdot T^2\cdot\sum_{n=0}^{k} F_{out_{n}}}$ ⑩
综上,可以假设如表2.3中的参数

表2.3 PID参数
下面,在上述模型条件下,用5种编程语言(Matlab, C, C++, Python)进行算法仿真。

1) Matlab
比较方便,可以先通过Matlb仿真确定PID系数
源码:
clear,clc,close all % 清屏 syms x
SV = 0; % 设定值,角(弧)度 0 (rad)
T = 0.01; % 计算周期/采样周期
Kp = 50; % 比例系数
Ti = 5; % 积分时间常数
Td = 0.05; % 微分时间常数 E = []; % 历史偏差
Fout = []; % 输出值,升力
E(1) = pi ./3; % 初始角度 π/3 (rad) for i = 1:1:3 % 绘制3种比较曲线
if i == 2;
Kp = 50; % 比例系数
Ti = 0.05; % 积分时间常数
Td = 0.05; % 微分时间常数
E = []; % 历史偏差
Fout = []; % 输出值,升力
E(1) = pi ./3; % 初始角度 π/3 (rad)
end % if i ==2 if i ==3;
Kp = 50; % 比例系数
Ti = 5; % 积分时间常数
Td = 0.005; % 微分时间常数
E = []; % 历史偏差
Fout = []; % 输出值,升力
E(1) = pi ./3; % 初始角度 π/3 (rad)
end % if i ==3 for t = 0:0.01:3; % 计算300次
k = round(t*100 + 2); % 当前指数 E(k) = E(1) - 25*(T^2)*sum(Fout); % 获取当前值 %#### 核心,PID计算输出值 ####%
if k>2;
if E(k) != 0;
Fout(k) = Kp*(E(k) + (T./Ti)*sum(E) + (Td./T)*(E(k)-E(k-1)));
end % end if E(k) !=0
end % end if k>2
%#############################% k++; % 当前指数+1 end % end for 计算400次 hold on
plot(E) % 显示数据图
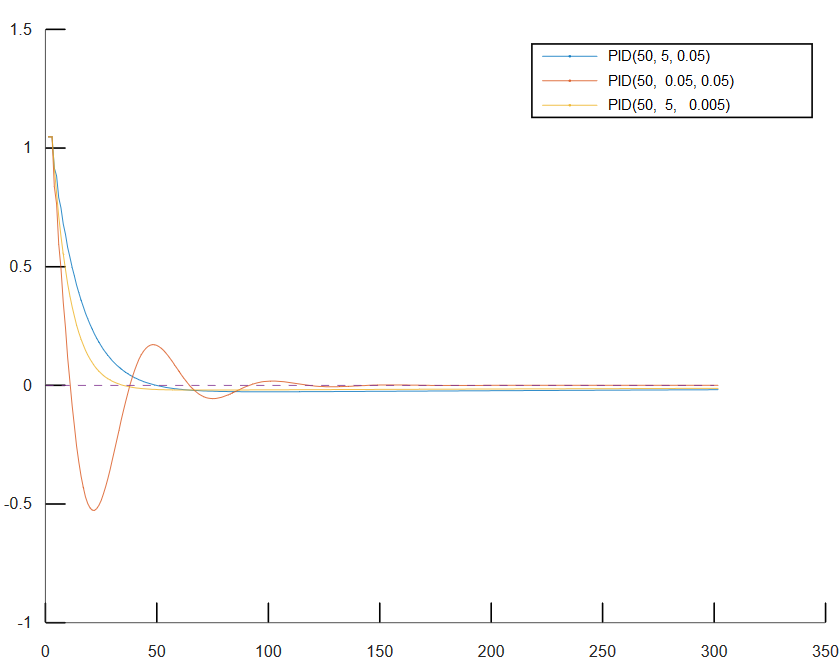
end # for 绘制3种比较曲线 legend('PID(50, 5, 0.05)','PID(50, 0.05, 0.05)','PID(20, 5, 0.005)') hold on
plot([0,300],[0,0],'--'); % 显示参考线,斜率0,截距0
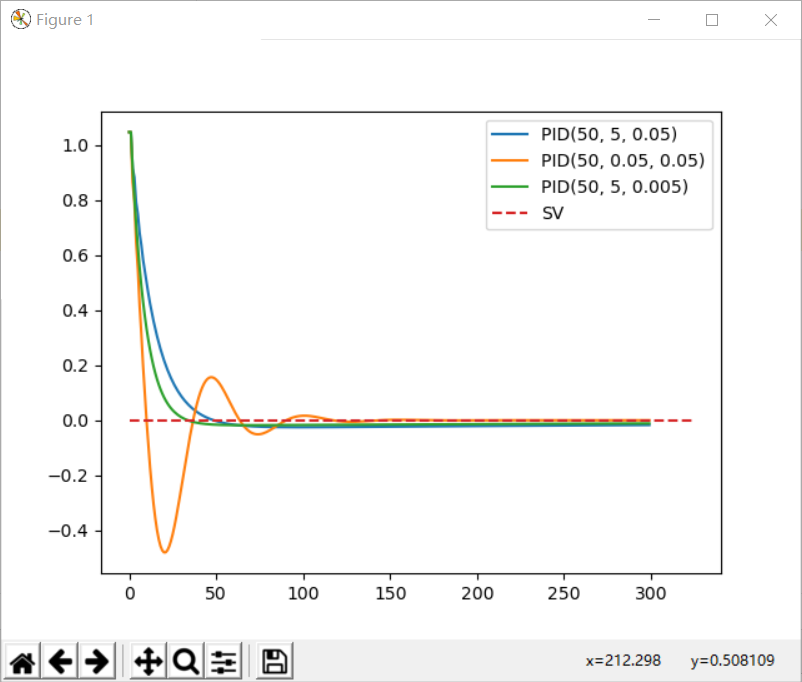
运行结果

2) C语言
/**@file main.c
* @brief 位置式PID C语言算法仿真
* @author BROSY
* @copyright CSU | BROSY
********************************************************************************/ /*************************************************************************************
注:以便查阅,我将所有函数和声明都放在main.c中,进行项目实践时,再设计文件架构
*************************************************************************************/ #include<stdio.h>
#define PI (3.1416) typedef struct {
const int SV = ; // 设定值(弧度rad) double InitVal; //初始偏差值
double T; // 采样周期
double Kp; // 比例系数
double Ti; // 积分时间常数
double Td; // 微分时间常数
double Ek; //当前偏差
double SumEk; //历史偏差之和
double Ek_1; //上次偏差
double SumFout; // 输出值之和
}PID_Structure; /**
@brief 位置式PID输出函数
@param [in] PID结构体
@return 算法输出值(额外升力)
*/
double PID_OUT(PID_Structure* PID)
{
double Fout;
Fout = PID->Kp * (PID->Ek
+ (PID->T / PID->Ti) * PID->SumEk
+ (PID->Td / PID->T) * (PID->Ek - PID->Ek_1)); return Fout; // 输出值(额外升力)
} /**
@brief 获取当前偏差值
@param [in] PID结构体, 历史输出值(数组)
@return kaka当前状态偏差值
*/
double GetCurrE(PID_Structure PID)
{
double Ek;
Ek = PID.InitVal - * (PID.T * PID.T) * PID.SumFout;
return Ek;
} int main()
{
PID_Structure PID; // 创建PID PID.InitVal = PI / ;
PID.T = 0.01;
PID.Kp = ;
PID.Ti = ;
PID.Td = 0.005;
PID.Ek = ;
PID.Ek_1 = ;
PID.SumFout = ;
PID.SumEk = ; // 计算400次
for (int i = ; i < ; i++)
{
if (i > )
{
PID.Ek_1 = PID.Ek; // 获取k-1的偏差值
}
PID.Ek = GetCurrE(PID); // 获取当前偏差值
PID.SumEk += PID.Ek; // 历史偏差之和 printf("%f\n", PID.Ek);
if (PID.Ek != && i > ) // 误差
{
PID.SumFout += PID_OUT(&PID); // 获取输出值之和 }
else
{
PID.SumFout += ; // 储存输出值
}
} }
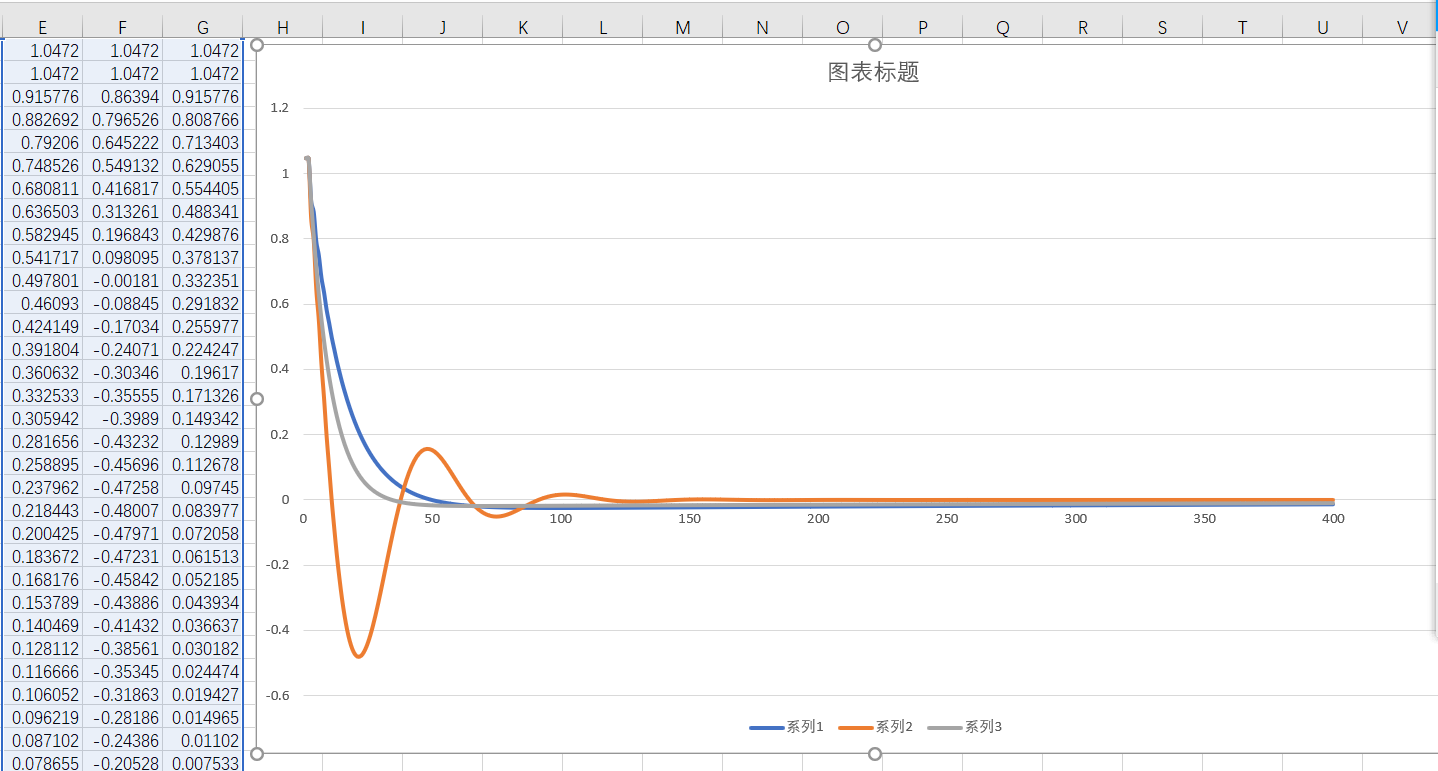
//C show all
将输出结果导入到excel中并绘制曲线:

3) C++
/**@file main.cpp
* @brief 位置式PID C语言算法仿真
* @author BROSY
* @copyright CSU | BROSY
********************************************************************************/ #include "PID.h" int main()
{
PID* pid[]; // 创建PID pid[] = new PID(, , 0.05); // 初始化PID1
pid[] = new PID(, 0.05, 0.05); // 初始化PID2
pid[] = new PID(, , 0.005); // 初始化PID3 for (int i = ; i < ; i++)
{
pid[i]->Loop();// 计算400次
delete pid[i]; // 释放内存
}
}
//main.cpp 展开全部
#include "PID.h"
#include <iostream>
/**
@brief 初始化PID参数
@param [in] P I D系数
只设置P I D的系数,其余默认
*/
PID::PID(double P, double I, double D)
{
Kp = P;
Ti = I;
Td = D; InitVal = (3.1426)/; // 初始偏差值π/3
T = 0.01; // 采样周期
Ek = ; //当前偏差
SumEk = ; //历史偏差之和
Ek_1 = ; //上次偏差
SumFout = ; // 输出值之和
} /**
@brief 位置式PID输出函数
@return 算法输出值(额外升力)
*/
double PID::PID_OUT()
{
double Fout; Fout = Kp * (Ek
+ (T / Ti) * SumEk
+ (Td / T) * (Ek - Ek_1)); return Fout; // 输出值(额外升力)
} /**
@brief 获取当前偏差值
@return kaka当前状态偏差值
*/
double PID::GetCurrE()
{
double Ek;
Ek = InitVal - * (T * T) * SumFout;
return Ek;
} /**
@brief 循环计算并输出值
@param [in] 计算次数
*/
void PID::Loop(int times)
{
std::cout << "计算次数:" << times << std::endl;
std::cout << "P = " << Kp << std::endl;
std::cout << "I = " << Ti << std::endl;
std::cout << "D = " << Td << std::endl<<std::endl; for (int i = ; i < times; i++)
{
if (i > )
{
Ek_1 = Ek; // 获取k-1的偏差值
}
Ek = GetCurrE(); // 获取当前偏差值
SumEk += Ek; // 历史偏差之和 std::cout << Ek << std::endl;
if (Ek != && i > ) // 误差
{
SumFout += PID_OUT(); // 获取输出值之和 }
else
{
SumFout += ; // 储存输出值
}
}
}
//PID.cpp
#pragma once
class PID
{
private:
const int SV = ; // 设定值(弧度rad) double InitVal; //初始偏差值
double T; // 采样周期
double Kp; // 比例系数
double Ti; // 积分时间常数
double Td; // 微分时间常数
double Ek; //当前偏差
double SumEk; //历史偏差之和
double Ek_1; //上次偏差
double SumFout; // 输出值之和 public:
PID(double P, double I, double D); // PID初始化,只输入PID系数,其余默认 double PID_OUT(); // PID算法核心,计算输出值
double GetCurrE(); // 获取当前值 void Loop(int times); // 循环计算输入计算次数
};
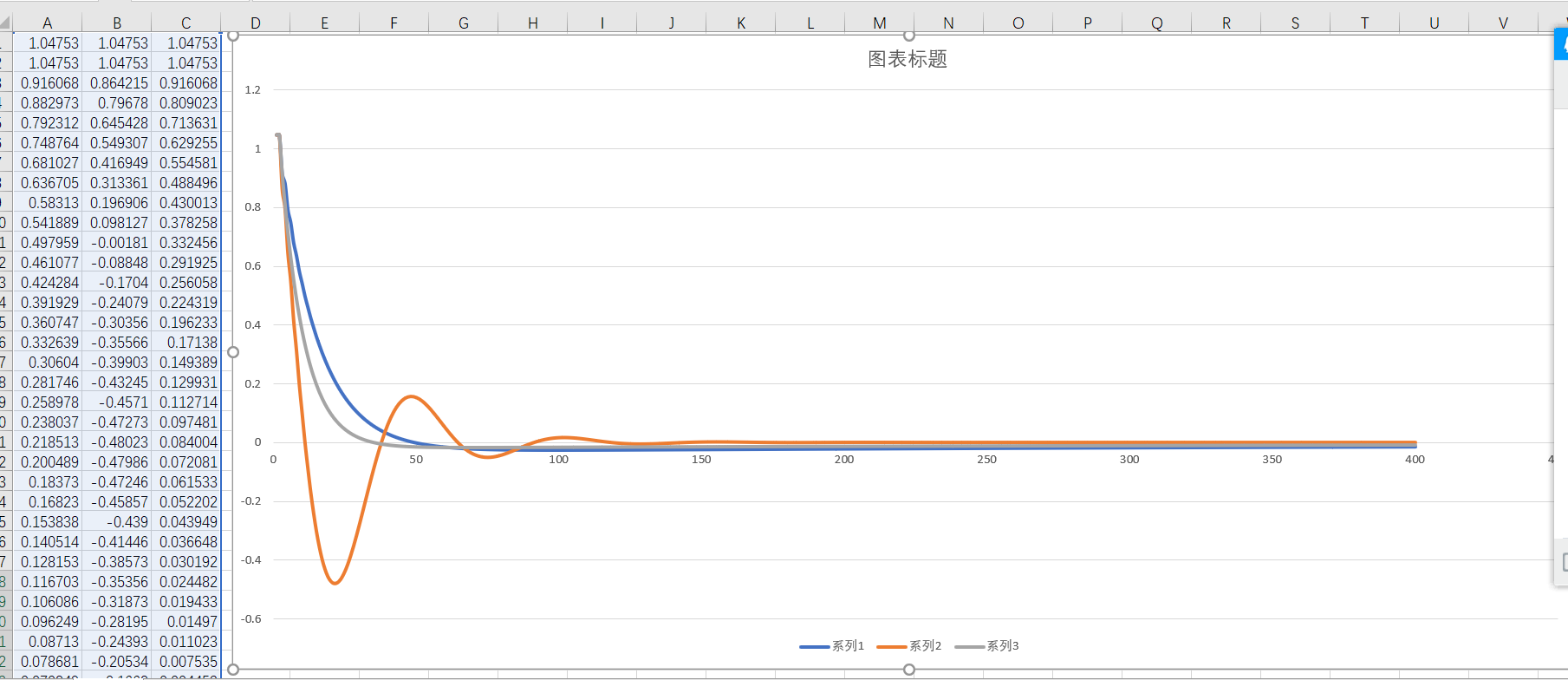
//PID.h
将输出结果导入到excel中并绘制曲线:

4) Python
import matplotlib.pyplot as plt # 导入绘图库
import numpy as np '''
@brief 位置式PID输出函数
@param [in] PID结构体
@return 算法输出值(额外升力)
''' def pid_out():
f_out = Kp * (Ek
+ (T / Ti) * sum_Ek
+ (Td / T) * (Ek - Ek_1))
return f_out '''
@brief 获取当前偏差值
@param [in] PID结构体, 历史输出值(数组)
@return kaka当前状态偏差值
''' def get_curr_e():
ek = init_val - 25 * (T ** 2) * sum_f_out
return ek sv = 0.0 # 设定值
init_val = (3.1416) / 3 # 初始值
T = 0.01 # 采样周期
times = 300 # 计算次数
e = np.zeros(times)
for t in range(3):
Ek = 0.0 # 当前偏差
sum_Ek = 0.0 # 历史偏差之和
Ek_1 = 0.0 # 上一次偏差
sum_f_out = 0.0 # 输出值之和(升力) if t == 0:
Kp = 50 # 比例系数
Ti = 5 # 积分时间常数
Td = 0.05 # 微分时间常数
if t == 1:
Kp = 50 # 比例系数
Ti = 0.05 # 积分时间常数
Td = 0.05 # 微分时间常数
if t == 2:
Kp = 50 # 比例系数
Ti = 5 # 积分时间常数
Td = 0.005 # 微分时间常数 '''
@brief 循环计算并输出值
@param [in] 计算次数
'''
for i in range(times):
if i > 0:
Ek_1 = Ek Ek = get_curr_e() # 获取当前值
sum_Ek = sum_Ek + Ek # 获取历史值之和 e[i] = Ek # 储存当前值,方便后面绘图 if Ek != 0 and i > 0:
sum_f_out = sum_f_out + pid_out() # 获取输出值之和 plt.plot(e, label='PID({0}, {1}, {2})'.format(Kp, Ti, Td)) # 画曲线图,显示PID图例 plt.plot(np.zeros(times + 25), label='SV', linestyle='--') # 设定值
plt.legend() # 显示图例 plt.show()
#
下载源码
链接:PID仿真源码 密码:hhh
某科学的PID算法学习笔记的更多相关文章
- C / C++算法学习笔记(8)-SHELL排序
原始地址:C / C++算法学习笔记(8)-SHELL排序 基本思想 先取一个小于n的整数d1作为第一个增量(gap),把文件的全部记录分成d1个组.所有距离为dl的倍数的记录放在同一个组中.先在各组 ...
- Manacher算法学习笔记 | LeetCode#5
Manacher算法学习笔记 DECLARATION 引用来源:https://www.cnblogs.com/grandyang/p/4475985.html CONTENT 用途:寻找一个字符串的 ...
- Johnson算法学习笔记
\(Johnson\)算法学习笔记. 在最短路的学习中,我们曾学习了三种最短路的算法,\(Bellman-Ford\)算法及其队列优化\(SPFA\)算法,\(Dijkstra\)算法.这些算法可以快 ...
- Johnson 全源最短路径算法学习笔记
Johnson 全源最短路径算法学习笔记 如果你希望得到带互动的极简文字体验,请点这里 我们来学习johnson Johnson 算法是一种在边加权有向图中找到所有顶点对之间最短路径的方法.它允许一些 ...
- PID算法学习记录
最近做项目需要用到PID算法,这个本来是我的专业(控制理论与控制工程),可是我好像是把这个东西全部还给老师了. 没办法,只好抽时间来学习了. 先占个座,后续将持续更新!
- 算法学习笔记——sort 和 qsort 提供的快速排序
这里存放的是笔者在学习算法和数据结构时相关的学习笔记,记录了笔者通过网络和书籍资料中学习到的知识点和技巧,在供自己学习和反思的同时为有需要的人提供一定的思路和帮助. 从排序开始 基本的排序算法包括冒泡 ...
- PID控制学习笔记(二)
不管是基本的PID控制还是变形的PID控制算法,其核心都是对输入信号(设定值信号.测量信号或者偏差信号等)做基本的比例.积分.微分运算,最终提供给被控过程良好的调节信号. 在过程控制仪表,特别是在数字 ...
- R语言实现关联规则与推荐算法(学习笔记)
R语言实现关联规则 笔者前言:以前在网上遇到很多很好的关联规则的案例,最近看到一个更好的,于是便学习一下,写个学习笔记. 1 1 0 0 2 1 1 0 0 3 1 1 0 1 4 0 0 0 0 5 ...
- 二次剩余Cipolla算法学习笔记
对于同余式 \[x^2 \equiv n \pmod p\] 若对于给定的\(n, P\),存在\(x\)满足上面的式子,则乘\(n\)在模\(p\)意义下是二次剩余,否则为非二次剩余 我们需要计算的 ...
随机推荐
- 多线程高并发编程(5) -- CountDownLatch、CyclicBarrier源码分析
一.CountDownLatch 1.概念 public CountDownLatch(int count) {//初始化 if (count < 0) throw new IllegalArg ...
- awd平台搭建
1.先是使用 https://github.com/m0xiaoxi/AWD_CTF_Platform 这个平台搭建 这个平台很好用,是python脚本自动搭建,基本不需要怎么更改,自带了四道题的源码 ...
- 控制反转IOC,依赖注入DI理解
IOC:控制反转,常规下,高层依赖低层,项目是不稳定的.我们则应该把高层对低层的依赖去掉,换成对抽象的依赖,细节交给第三方来决定,这就是控制反转,反转的目的是为了降低依赖,增强扩展性. DI:依赖注入 ...
- react: typescript integrate withRouter
define interface: export interface INav { nav: string } export interface IModuleItem { state?: strin ...
- System类的两个静态方法currentTimeMillis 和 arraycopy
package com.yhqtv.demo02.ThreadPool; import java.util.Arrays; public class Test { public static void ...
- 认证与授权】Spring Security系列之认证流程解析
上面我们一起开始了Spring Security的初体验,并通过简单的配置甚至零配置就可以完成一个简单的认证流程.可能我们都有很大的疑惑,这中间到底发生了什么,为什么简单的配置就可以完成一个认证流程啊 ...
- nignx location index的用法
来源:https://blog.csdn.net/qq_32331073/article/details/81945134#_10 index指令的作用 在前后端分离的基础上,通过Nginx配置,指定 ...
- Spring5参考指南:SpringAOP简介
文章目录 AOP的概念 Spring AOP简介 Spring AOP通知类型 写过程序的都知道OOP即面向对象编程. 从最开始的面向过程编程,到后面的面向对象编程,程序的编写方式发生了重大的变化,面 ...
- Spring5参考指南: BeanWrapper和PropertyEditor
文章目录 BeanWrapper PropertyEditor BeanWrapper 通常来说一个Bean包含一个默认的无参构造函数,和属性的get,set方法. org.springframewo ...
- 整整 Java 线程池
为什么用线程池 用官方文档来说,线程池解决了两个问题: 一是在执行大量的异步任务时,因为线程池减少了任务开始前的准备工作,如频繁创建线程,启动线程等工作,提升了性能表现:二是提供了一种绑定资源和管理资 ...