洛谷——P1126 机器人搬重物
P1126 机器人搬重物
题目描述
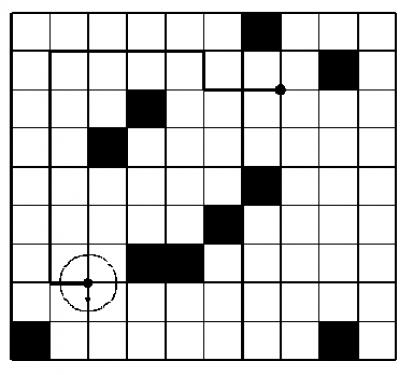
机器人移动学会(RMI)现在正尝试用机器人搬运物品。机器人的形状是一个直径1.6米的球。在试验阶段,机器人被用于在一个储藏室中搬运货物。储藏室是一个N*M的网格,有些格子为不可移动的障碍。机器人的中心总是在格点上,当然,机器人必须在最短的时间内把物品搬运到指定的地方。机器人接受的指令有:向前移动1步(Creep);向前移动2步(Walk);向前移动3步(Run);向左转(Left);向右转(Right)。每个指令所需要的时间为1秒。请你计算一下机器人完成任务所需的最少时间。
输入输出格式
输入格式:
输入的第一行为两个正整数N,M(N,M<=50),下面N行是储藏室的构造,0表示无障碍,1表示有障碍,数字之间用一个空格隔开。接着一行有四个整数和一个大写字母,分别为起始点和目标点左上角网格的行与列,起始时的面对方向(东E,南S,西W,北N),数与数,数与字母之间均用一个空格隔开。终点的面向方向是任意的。
输出格式:
一个整数,表示机器人完成任务所需的最少时间。如果无法到达,输出-1。
输入输出样例
9 10 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 7 2 2 7 S
#include<queue>
#include<cstdio>
#include<cstring>
#include<iostream>
#include<algorithm>
#define N 100
using namespace std;
char ch;
];
int n,m,d,sx,sy,ex,ey,dis[N][N];
][]={{,,},{-,-,-},{,,},{,,}};
][]={{-,-,-},{,,},{,,},{,,}};
int read()
{
,f=; char ch=getchar();
') ch=getchar();
+ch-',ch=getchar();
return x*f;
}
struct Que
{
int x,y,d,step;
}que;
queue<Que>q;
int main()
{
n=read(),m=read();
;i<=n;i++)
;j<=m;j++)
{
vis[i][j]=read();
if(vis[i][j])
vis[i-][j]=vis[i-][j-]=vis[i][j-]=true;
}
sx=read(),sy=read();
ex=read(),ey=read();
cin>>ch;vis[sx][sy]=;
;
;
;
;
que.x=sx,que.y=sy;
dis[sx][sy]=que.step=;
vist[sx][sy][que.d]=true;
q.push(que);
while(!q.empty())
{
Que p=q.front();q.pop();
;}
;i<;i++)
{
int x=p.x+xx[p.d][i],y=p.y+yy[p.d][i];
||y<||x>=n||y>=m||vis[x][y]) break;
if(vist[x][y][p.d]) continue;
vist[x][y][p.d]=true;
que.x=x,que.y=y,que.d=p.d,que.step=p.step+;
q.push(que);
}
que.x=p.x,que.y=p.y,que.d=p.d+,que.step=p.step+;
==) que.d=;
if(!vist[que.x][que.y][que.d]) vist[que.x][que.y][que.d]=true,q.push(que);
que.x=p.x,que.y=p.y,que.d=p.d-,que.step=p.step+;
==-) que.d=;
if(!vist[que.x][que.y][que.d])
vist[p.x][p.y][p.d]=true,q.push(que);
}
printf("-1");
;
}
洛谷——P1126 机器人搬重物的更多相关文章
- 洛谷P1126 机器人搬重物
洛谷1126 机器人搬重物 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格, ...
- 洛谷 P1126 机器人搬重物 (BFS)
题目链接:https://www.luogu.org/problemnew/show/P1126 吐槽:这题很阴险 一开始没把格子图转化成点图:30分 转化成点图,发现样例过不去,原来每步要判断vis ...
- 洛谷P1126 机器人搬重物【bfs】
题目链接:https://www.luogu.org/problemnew/show/P1126 题意: 给定一个n*m的方格,机器人推着直径是1.6的球在格子的线上运动. 每一秒钟可以向左转,向右转 ...
- 洛谷P1126机器人搬重物[BFS]
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有些格子为不可移动的障碍.机 ...
- 洛谷 P1126 机器人搬重物
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径 $1.6 米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个 N×MN \times MN×M ...
- 洛谷—— P1126 机器人搬重物
https://www.luogu.org/problem/show?pid=1126 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机 ...
- luogu P1126 机器人搬重物 题解
luogu P1126 机器人搬重物 题解 题目描述 机器人移动学会(\(RMI\))现在正尝试用机器人搬运物品.机器人的形状是一个直径\(1.6\)米的球.在试验阶段,机器人被用于在一个储藏室中搬运 ...
- P1126 机器人搬重物
P1126 机器人搬重物 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有 ...
- luogu P1126 机器人搬重物
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有些格子为不可移动的障碍.机 ...
随机推荐
- SDUSToj第十一次作业源代码格式问题
Problem I: 源代码的格式 Time Limit: 1 Sec Memory Limit: 64 MBSubmit: 1471 Solved: 634 [Submit][Status][W ...
- hdu 1011 Starship Troopers(树形背包)
Starship Troopers Time Limit: 10000/5000 MS (Java/Others) Memory Limit: 65536/32768 K (Java/Other ...
- python单例模式的几种实现方法
单例模式 单例模式(Singleton Pattern)是一种常用的软件设计模式,该模式的主要目的是确保某一个类只有一个实例存在.当你希望在整个系统中,某个类只能出现一个实例时,单例对象就能派上用场. ...
- Nginx配置语法和日志
nginx配置 配置文件 重启服务 http请求 nginx日志 一共有两个日志文件 在配置文件中添加这个,就可以在日志文件中看到请求的userAgent 配置语法的检查 nginx重新加载配置 发送 ...
- mongo以及mysql常用语句
db.user.find({']}}).pretty(); db.user.find({primaryPhone:).forEach(function(user){print('my phonenum ...
- datatable 修改点击列头进行排序顺序
一般点击排序时,是先升序后降序 可以通过如下代码修改排序规则 jQuery(function ($) { $(".datatable").dataTable({ "pag ...
- J2ee项目 编译依赖顺序
这儿有个帖子, 最后一个回复是: “我把我项目的libraries的"Order and Export"中的JRE与J2EE顺序换了一个问题解决”. 帖子地址: http://b ...
- Django Rest Framework 教程及API向导
Django Rest Framework 教程及API向导. 一.请求(Request)REST_FRAMEWORK 中的 Request 扩展了标准的HttpRequest,为 REST_FRAM ...
- JS进行人民币大小写转换
//数字金额大写转换(可以处理整数,小数,负数) function upDigit() { digit=$("#digit").html(); n=digit.replace(/\ ...
- js的编码函数
js对文字进行编码,涉及3个函数:escape,encodeURI,encodeURIComponent,相应3个解码函数:unescape,decodeURI,decodeURIComponent ...