引擎设计跟踪(九.14.2 final) Inverse Kinematics: CCD 在Blade中的实现
因为工作忙, 好久没有记笔记了, 但是有时候发现还得翻以前的笔记去看, 所以还是尽量记下来备忘.
关于IK, 读了一些paper, 觉得之前翻译的那篇, welman的paper (http://graphics.ucsd.edu/courses/cse169_w04/welman.pdf 摘译:http://www.cnblogs.com/crazii/p/4662199.html) 非常有用, 入门必读. 入门了以后就可以结合工程来拓展了.
先贴一下CCD里面一个关节的分析: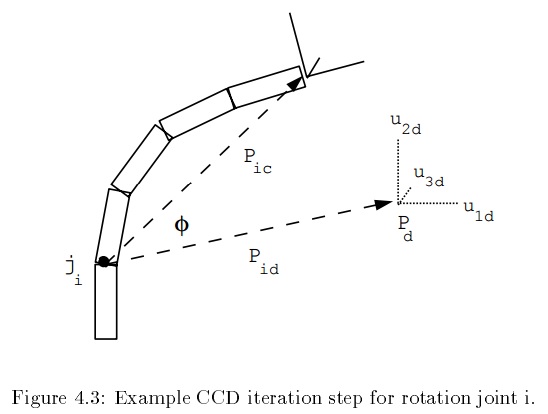
当Pic的方向和Pid重合时, 末端器离目标的距离最近, 所以把Pic绕着旋转轴旋转Φ度就可以. 当然旋转轴有方向,Φ也有方向(顺时针/逆时针).
如果取转轴axis = Pic x Pid, 如果Pic和Pid已经单位化, 那么旋转角度等于asin(|axis|).
实际中可能会先判断两个向量是否已经同向, 如果方向不一致再旋转. 代码可以简单表示如下:
Pic.normalize();
Pid.normalize();
scalar cosAngle = Pic.dotProduct(Pid);
if( cosAngle < 1.0f ) //whether in same direction
{
Vector3 axis = Pic.crossProduct(Pid);
scalar angle = std::acos(cosAngle);
Quaternion rotation(axis, angle);
//rotate the joint using rotation
}
这里跟welman paper里的思路相同, 但是有细微的不同:
- 这里直接使用了3D的vector math来旋转向量, 而welman用了几何分析来建模, 之后就用代数简约并用导数求极值.
- 这里考虑到关节的多个DOF(Dimensions Of Freedom), axis是根据Pic和Pid两个方向叉积直接求得, 故axis可以是任意方向, 而原文中使用的是已知的固定转轴.
- 原文中的CCD没有奇异性, 因为用的固定转轴, 但是这里的方法是有奇异方向的: 当Pic和Pid一开始就方向相同或相反方向的时候, (跟原文中雅克比转置的奇异方向一样), 已经不需要旋转. 况且Pic x Pid是0向量, 转轴丢失, 产生了Gimbal lock. 这个问题后面再分析.
上面是对CCD问题的基本算法, 下面记录实际使用时的一些问题:
约束(constraints)
考虑到DOF和旋转角度的限制, 需要给每个关节的旋转角度加上最大值和最小值. 这个些限制是关节点的局部限制, 并且与CCD旋转时的那个旋转过程量的转轴无关, 可以使用用局部旋转的欧拉角.
这就需要上面CCD迭代旋转关节时, 最好在关节的局部空间进行. 当然我也试过在模型空间(这里可以等同于世界空间)计算CCD, 不过应用约束的时候必须转换到局部空间.
约束角度的建立, 可以根据现实中关节的角度来定义, 比如"胳膊肘不能往外拐", 来限制关节的旋转. 需要注意的是, constraint的角度定义要跟artist建模时的空间一致.
比如建模时, 模型正面朝向z+, 那么膝盖的转轴就是x, 对应的欧拉角分量为pitch. 当模型正面朝向x+, 那么膝盖的转轴就变成z, 对应roll. 所以如果要配置约束角, 要跟实际美术的规范一致.
不过Blade角度约束是这样得来的: 分析原始FK动画, 得到所有关节的活动范围, 把它作为约束.
这是在快速阅读某个paper时发现的方法, 不过因为看的paper太多, 这个方法也只是在文中一句带过, 所以一不小心就可能没注意到. 还有一个Inverse Inverse Kinematics的方法, 也是分析FK来求解IK的, 不过没有读.
这个方法非常的简单, 缺点是需要有原始FK的复杂完整动画才有效. 比如一个简单站立动画, 腿部从来没有弯曲过, 膝盖没有旋转, 那么生成的约束范围就太小, 导致IK不可能出现弯腿.
对于原始FK动画的分析, blade是把它放在动画导入/导出时做的, 也就是在生成动画文件的时候, 顺便提取了所有关键中的数据, 并保存在骨骼动画文件中.
blade中constraints的定义如下:
typedef struct IKConstraints
{
fp32 mMinX;
fp32 mMaxX;
fp32 mMinY;
fp32 mMaxY;
fp32 mMinZ;
fp32 mMaxZ;
inline IKConstraints()
{
mMinX = mMinY = mMinZ = FLT_MAX;
mMaxX = mMaxY = mMaxZ = -FLT_MAX;
}
inline IKConstraints(fp32 minx, fp32 maxx, fp32 miny, fp32 maxy, fp32 minz, fp32 maxz)
{
mMinX = minx; mMaxX = maxx;
mMinY = miny; mMaxY = maxy;
mMinZ = minz; mMaxZ = maxz;
} inline void merge(const SIKConstraints& rhs)
{
mMinX = std::min(mMinX, rhs.mMinX);
mMaxX = std::max(mMaxX, rhs.mMaxX);
mMinY = std::min(mMinY, rhs.mMinY);
mMaxY = std::max(mMaxY, rhs.mMaxY);
mMinZ = std::min(mMinZ, rhs.mMinZ);
mMaxZ = std::max(mMaxZ, rhs.mMaxZ);
}
}IK_CONSTRAINTS;
可以看到constraints包含了yaw,pitch,roll的最大值和最小值, 作为旋转的有效范围.
在生成骨骼动画时, 提取了constraints的信息:
Vector<IK_CONSTRAINTS> constraints( boneCount );
size_t index = ;
for(size_t i = ; i < boneCount; ++i)
{
scalar initPitch = , initYaw = , initRoll = ;
for(size_t j = ; j < keyCountList[i]; ++j)
{
const BoneDQ& keyDQ = keyFrameArray[index++].getTransform();
scalar yaw, pitch, roll;
keyDQ.real.getYawPitchRoll(yaw, pitch, roll);
scalar minPitch = std::min(pitch, initPitch);
scalar maxPitch = std::max(pitch, initPitch);
scalar minYaw = std::min(yaw, initYaw);
scalar maxYaw = std::max(yaw, initYaw);
scalar minRoll = std::min(roll, initRoll);
scalar maxRoll = std::max(roll, initRoll);
constraints[i].merge( IK_CONSTRAINTS(minPitch, maxPitch, minYaw, maxYaw, minRoll, maxRoll) );
}
}
需要注意如果有offline工具支持skeleton文件/动画的合并操作, 那么也需要将这些约束角合并.
然后在每次CCD迭代时, 应用这些约束角. 约束角是针对关节的局部最终pose:状态量的角度, 不是单次旋转的过程量的约束.
所以在CCD中计算出的rotation, 先应用到关节点当前的pose上, 得到一个准final pose, 在用角度约束, 得到约束后的final pose:
Vector3 t = localTransformCache[i].getTranslation();
//apply rotation
Quaternion r = localTransformCache[i].getRotation() * Quaternion(axis, angle); const IK_CONSTRAINTS& constraints = chain[i].getConstraints();
scalar yaw, pitch, roll;
//get rotated pose
r.getYawPitchRoll(yaw, pitch, roll); //apply constraints
pitch = Math::Clamp(pitch, constraints.mMinX, constraints.mMaxX);
yaw = Math::Clamp(yaw, constraints.mMinY, constraints.mMaxY);
roll = Math::Clamp(roll, constraints.mMinZ, constraints.mMaxZ); //final pose
localTransformCache[i].set(Quaternion(yaw, pitch, roll), t);
另外因为Blade最近把quaternion的operator* 重新定义为contatenate, 所以顺序跟以前不一样了.
奇异性问题和基于约束角的启发函数(singularity problem, and heuristic function based on constraints)
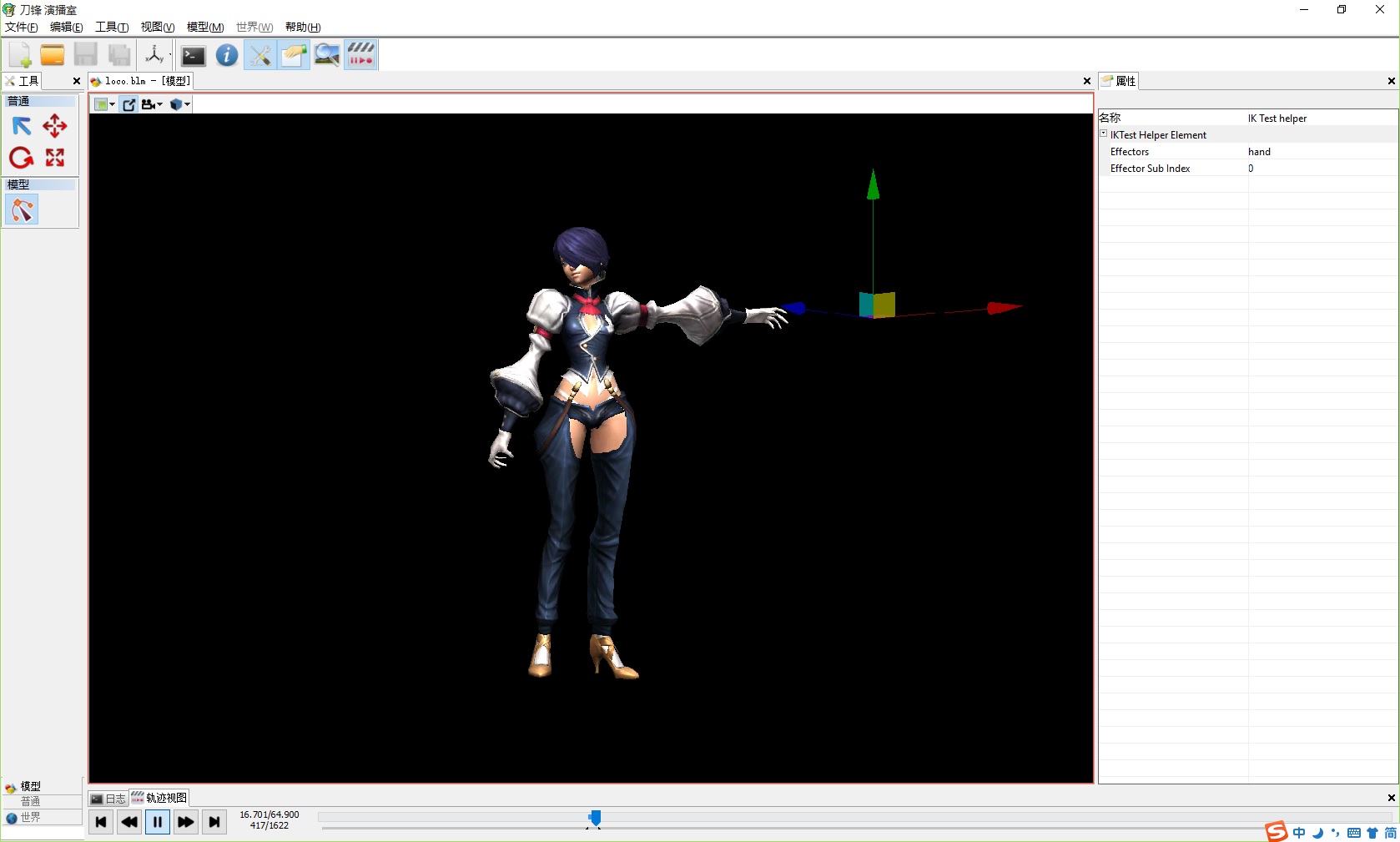
前面提到这种使用非固定转轴的方式求解CCD时会有奇异问题. 实例如下:

上图中Gizmo的位置为脚关节的目标位置, 然而对于膝关节来说, Pic和Pid已经是相同方向(都朝下), crossProduct(Pic, Pid) = vector 0 , 所以Pid是一个奇异方向(singular direction), 根据这两个向量得不到转轴. 所以腿部不会弯曲. 解决方法可以用welman的原始解法, 即使用已知固定转轴, 比如固定为x轴为转轴, 来让他弯曲(我没有尝试,原因如下:).
welman提到, 在奇异方向上, CCD的收敛速度会变慢.
而且, 即便用了welman的固定转轴的解法, 弯曲方向仍然受到约束角的限制. 比如没有约束时, 用CCD解出腿部可能能以"<"姿势达到目标, 也可能以">"姿势. 然而实际上膝盖关节不可能向外拐. 合理的解是">". 这就靠约束角来限制了,
可是CCD在这个问题上, 在最开始迭代时, 可能就倾向于向外拐, 最后被约束, 实际上迭代中一直在尝试向外拐, 而最终结果没有转动.
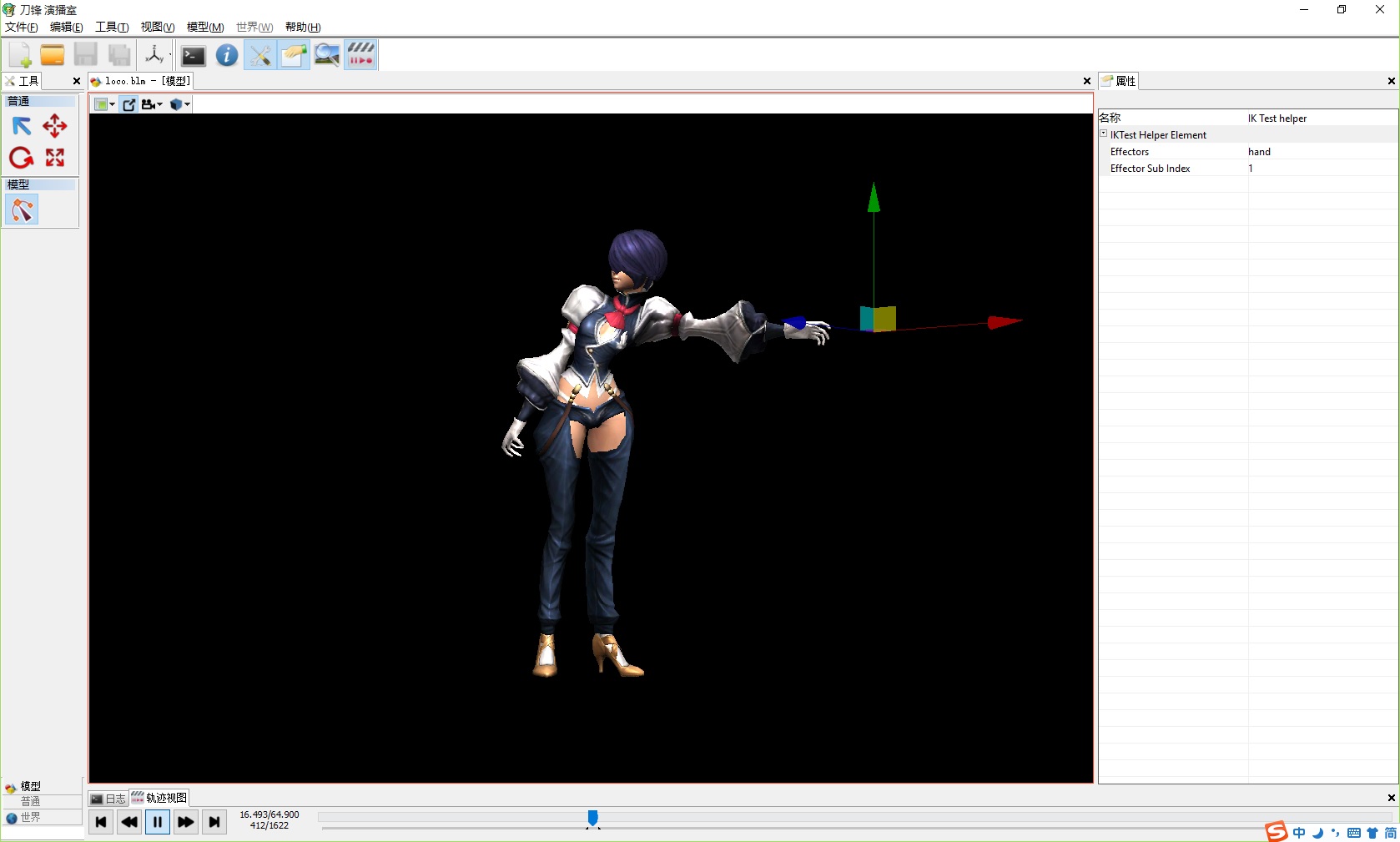
比如: 把目标朝外(下图中朝右)偏移, 这个时候已经不是奇异配置了, 但是目标点偏外, 而CCD的启发方式比较激进, 是末端器离目标"越近越好", 所以迭代时, 将尝试将膝关节向外拐, 来靠近目标, 然而会被约束角限制, 其实不能转动, 只能是父节点通过类似的方式转动. 最后经过几次迭代, 又变成了奇异方向, 无法达到目标, 这种情况也要使用固定转轴:

而实际上想要的结果, 是这样 (膝关节向内)

这个时候, 如果把约束角也加入到启发过程中: 如果发现一个方向被约束, 根本行不通, 再怎么迭代下去也没意义, 那就尝试朝着不受约束角限制的方向旋转.
这个额外的启发函数, 可以避免关节朝着无意义的方向旋转. 而他恰好同时也可以将singular direction时不会旋转的问题, 变成朝着一个不会受约束角限制方向的旋转.
//fix singular direction problem. and apply heuristic direction on constraints: if impossible(angle clamped) on one direction, try the other.
if( pitch == constraints.mMinX && constraints.mMinX > -5e-2f )
pitch = constraints.mMaxX*1e-2f;
else if( pitch == constraints.mMaxX && constraints.mMaxX < 5e-2f )
pitch = constraints.mMinX*1e-2f; if( yaw == constraints.mMinY && constraints.mMinY > -5e-2f )
yaw = constraints.mMaxY*1e-2f;
else if( yaw == constraints.mMaxY && constraints.mMaxY < 5e-2f )
yaw = constraints.mMinY*1e-2f; if( roll == constraints.mMinZ && constraints.mMinZ > -5e-2f )
roll = constraints.mMaxZ*1e-2f;
else if( roll == constraints.mMaxZ && constraints.mMaxZ < 5e-2f )
roll = constraints.mMinZ*1e-2f;
这个启发值是一个非常小的偏移值, 如果没有效果, 后面迭代中会被抵消/忽略. 如果有效, 就会影响后面的迭代. 目前blade中这个启发方式比较暴力, 直接hard code, 但是原理上是这样了.
实际使用(Use IK in engine/application)
实际使用时需要设计接口, 来设置IKSover的目标. 比如通过physics引擎得到脚部的位置, 把这个位置作为腿部IK chain的目标. Blade的IK solving是在FK动画结束以后, 基于FK动画的结果来做, 所以不需要额外的blending.
关于IK chain的生成, Blade是在runtime(加载时)根据骨骼名字来建立, 而不是离线生成.
另外, Blade的IK模式也分为两种:
- Simple IK模式: 一个skeleton包含多个IK chain, 比如腿和胳膊, 4条IK chain, 但这几条IK chain是独立的, 互不影响, 也不会影响整个身体的姿势. 比如两条腿在盆骨(pelvis)处合并, 那么盆骨就作为腿部两个chain的shared base, 到这里结束. 盆骨不会参与IK计算, 所以两条腿互不影响. 这种方式十分简单, 适合用于只有手部或者脚部定位(foot placement)的需求.
- Fullbody IK模式: 整个skeleton就是一个唯一的IK chain, 它包含了多个end effector. 每个effector的定位都可能影响到身体的整个pose, 所以会影响其他effector, 比如定位左脚的时候, 盆骨也会旋转, 导致右脚受到影响. 网上很多paper里说CCD只能解决单个effector的IK chain, 对于multiple effectors, CCD不适用, 实际上我试了是可以的. 算法的整体思路是受到FABRIK(forward and backward reach inverse kinematics)的启发.(http://www.academia.edu/9165835/FABRIK_A_fast_iterative_solver_for_the_Inverse_Kinematics_problem pdf) 当然这里实际用的是CCD解算.
Fullbody IK适合用于复杂的需求, 比如我非常喜欢的的<古墓丽影>系列, 攀爬跑跳抓, 需要用到这个方式.
需要注意的点: simple IK脚部定位的时候不能影响根节点, 所以如果遇到高低不平的地面, 需要寻找最低点, 把整个角色定位到最低点, 再计算IK. 而Fullbody IK理论上可以自动计算身体的位置, 但需要将跟节点设置为位移型的关节, 而不是旋转型关节, 来重新定位整个身体的位置, 不过Blade尚未支持, 后面有时间的话再加. 而且移动身体位置并不通用, 可能最为solve的参数更好, 例如: 手部reach的时候如果也移动整个身体, 可能会发生瞬移. 还有地面高度差太大, 也许要处理. 等等这些具体逻辑就不展开了.
其他遗留问题: 目前使用的是手部/脚部的定位, 而手指/脚趾的精确定位,有时候也需要, 这个以后慢慢细化.
误差控制 (error tolerance)
目前Blade使用的误差是0.001, 因为IK计算是在模型空间和骨骼局部空间, 所以不需要考虑模型的缩放. 但是这个0.001是以模型/骨骼本身大小为参考, 参考值为2.0(米)高度. 对于不同大小的模型, 这个误差值会基于参考值进行缩放.
static const scalar REFERENCE_SIZESQ = (1.5f*1.5f) + (2.0f*2.0f) + (0.5f*0.5f);
static const scalar MIN_DISTANCE = 0.001f;
static const scalar MIN_DISTANCESQ = (MIN_DISTANCE*MIN_DISTANCE) / REFERENCE_SIZESQ;
const scalar tolerance = MIN_DISTANCESQ*(mIK->getSquaredSize());
实际的模型大小, 可以通过模型原始大小取得, 也可以通过骨架的binding pose的大小取得. Blade为了动画跟模型尽量解耦, 使用的是整个骨架的包围盒半径.
效率 (performance)
测试结果的效率还算可以, 后续可能会继续优化, 一些优化的小细节后面再记. 目前CPU i7 4770K, 单线程计算, 解算一个有效IK关节数为18, end effecotor数量为4的Full body IK, 最大迭代次数20, 最大耗时在~0.4ms左右.
而4个chain的Simple IK 解算时间大约为0.1ms.
如果配合动画LOD, 选择性的开启IK, 比如只有主角色开启IK, 或者近处角色, 可以实用.
记了这么多感觉有点累, 后面如果有时间再继续写备忘. IK的坑去年就打算入, 可是工作太忙. 目前mile stone 2: model算是已经结束, mile stone 3估计又到明年年底才能开始, 每年只有这段时期有点空闲. 而且工作很忙, 本身也需要休息. 后面deferred shading的计划是这样, 使用INTZ做depth pre pass, 从而充分发挥early Z的效果, 然后MRT渲染法线和颜色. dx9以后的API都可以直接读取深度缓冲, 从而不需要再单独渲染深度, 而nvidia显卡从g80以后也有INTZ来暴露新的API特性, 所以可以使用.这样既可以最大发挥earlyZ, 避免overdraw, 同时也少了G buffer的大小.
最后放一个Simple IK和Fullbody IK的对比(Fullbody时身体也会有倾斜). 另外尝试了一下用Fullbody IK定位四肢, 把stand动画改成一个攀爬动画, 也是可行的.
引擎设计跟踪(九.14.2 final) Inverse Kinematics: CCD 在Blade中的实现的更多相关文章
- 引擎设计跟踪(九.14.2a) 导出插件问题修复和 Tangent Space 裂缝修复
由于工作很忙, 近半年的业余时间没空搞了, 不过工作马上忙完了, 趁十一有时间修了一些小问题. 这次更新跟骨骼动画无关, 修复了一个之前的, 关于tangent space裂缝的问题: 引擎设计跟踪( ...
- 引擎设计跟踪(九.14.2j) TableView工具填坑以及多国语言
Blade的UI都是预定义的接口, 然后由插件来负责实现, 目前只有MFC的插件. 最近加上了TableView的视图, 用于一些文件的查看和编辑, 比如前面在文件包的笔记中提到需写一个package ...
- 引擎设计跟踪(九.14.2i) Android GLES 3.0 完善
最近把渲染设备对应的GLES的API填上了. 主要有IRenderDevice/IShader/ITexture/IGraphicsResourceManager/IIndexBuffer/IVert ...
- 引擎设计跟踪(九.14.2g) 将GNUMake集成到Visual Studio
最近在做纹理压缩工具, 以及数据包的生成. shader编译已经在vs工程里面了, 使用custom build tool, build命令是调用BladeShaderComplier, 并且每个文件 ...
- 引擎设计跟踪(九.14.2f) 最近更新: OpenGL ES & tools
之前骨骼动画的IK暂时放一放, 最近在搞GLES的实现. 之前除了GLES没有实现, Android的代码移植已经完毕: [原]跨平台编程注意事项(三): window 到 android 的 移植 ...
- 引擎设计跟踪(九.14.2d) [翻译] shader的跨平台方案之2014
Origin: http://aras-p.info/blog/2014/03/28/cross-platform-shaders-in-2014/ 简译 translation: 作者在2012年写 ...
- 引擎设计跟踪(九.14.2b) 骨骼动画基本完成
首先贴一个介绍max的sdk和骨骼动画的文章, 虽然很早的文章, 但是很有用, 感谢前辈们的贡献: 3Ds MAX骨骼动画导出插件编写 1.Dual Quaternion 关于Dual Quatern ...
- 引擎设计跟踪(九.14.3.4) mile stone 2 - model和fbx导入的补漏
之前milestone2已经做完的工作, 现在趁有时间记下笔记. 1.设计 这里是指兼容3ds max导出/fbx格式转换等等一系列工作的设计. 最开始, Blade的3dsmax导出插件, 全部代码 ...
- 引擎设计跟踪(九.14.3.2) Deferred shading的后续实现和优化
最近完成了deferred shading和spot light的支持, 并作了一部分优化. 之前forward shading也只支持方向光, 现在也支持了点光源和探照光. 对于forward sh ...
随机推荐
- wifi探针的使用说明.
我使用的是四博智联提供的WIFI探针 DT-06产品 点击打开链接 1. 数据读取 可以直接通过串口即可读取数据,串口波特率设置为 115200,其它选项默认. 如果需要PC机测试,请使用杜邦线转接到 ...
- git远端密码修改
控制面板--凭据管理器--windows凭据--修改git密码
- 2D 加速图形界面开发源代码亲写 想买来学习得加qq 313244484 20万当前代码,完整400万包写完
#include "StdAfx.h" #include "GUIFrame.h" #include <stdlib.h> #include < ...
- java基础知识—数组
1.数组:是一个变量,存储相同数据类型的一组数据. 2.数据的优点:减少代码量.易查找. 3.数组的使用步骤: 1)声明数组:int scores []: 2)开辟空间:scores = new in ...
- Xcode Archive打包失败问题
ionic3项目 完成 模拟器 真机测试均可以打包安装成功 在Archive的时候报错了 错误如下 code signing is required for product type 'Applic ...
- 原生Ajax--XmlHttpRequest对象和jQuery.ajax()
Ajax主要就是使用 [XmlHttpRequest]对象来完成请求的操作,该对象在主流浏览器中均存在(除早起的IE) 1.XmlHttpRequest对象介绍 XmlHttpRequest对象的主要 ...
- golang中的mutex锁
mutex锁中一种互斥锁,如果有多个goroutine需要对同一变量进行修改则需要对该变量施加mutex锁以实现安全读写.
- SmartBinding与kbmMW#1
即将发布的kbmMW,实现了SmartBinding,SmartBinding的设计目标是: 必须易于使用 必须最小化或完全删除锅炉板代码.(你看到这里的趋势了吗?... kbmMW从那时开始就是为了 ...
- dos3章
FOR命令中有一些变量,他们的用法许多新手朋友还不太了解,今天给大家讲解他们的用法! 先把FOR的变量全部列出来: ~I - 删除任何引号("),扩展 %I %~f ...
- Mysql远程访问报错2003
如果没有权限新建一个mysql用户给添加远程连接的权限(推荐设置) 1.例如,你想admin使用123456从任何主机连接到mysql服务器的话. GRANT ALL PRIVILEGES ON *. ...