OpenCV探索之路(十五):角点检测
角点检测是计算机视觉系统中用来获取图像特征的一种方法。我们都常说,这幅图像很有特点,但是一问他到底有哪些特点,或者这幅图有哪些特征可以让你一下子就识别出该物体,你可能就说不出来了。其实说图像的特征,你可以尝试说一下这幅图有几个矩形啊几个圆形啊,有几条直线啊,当然啦,你也可以说一下有几个角点。
什么是角点?
角点通常被定义为两条边的交点。比如,三角形有三个角,矩形有四个角,这些就是角点,也是他们叫做矩形、三角形的特征,我们看到一些几何图形具有三个角,那么我们便可以脱口而出说这是一个三角形。
上面所说的是严格意义上的角点,但是从广义来说,角点指的是拥有特定特征的图像点,这些特征点在图像中有具体的坐标,并具有某些数学特征(比如局部最大或最小的灰度)。
图像特征类型可以被分为三种:
- 边缘
- 角点(感兴趣关键点)
- 斑点(感兴趣区域)
角点是个很特殊的存在。如果某一点在任意方向的一个微小的变动都会引起灰度很大的变化,那么我们就可以把该点看做是角点。
Harris 角点检测
Harris角点检测是一种直接基于灰度图的角点提取算法,稳定性高,尤其对L型角点(也就是直角)检测精度高。缺点也是明显的,就是运算速度慢。
OpenCV使用的相应函数是
void cornerHarris( InputArray src, OutputArray dst, int blockSize,int ksize,
double k, int borderType = BORDER_DEFAULT );
下面给出相应的检测代码。
#include <opencv2/opencv.hpp>
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
using namespace std;
Mat g_srcImage, g_srcImage1, g_grayImage;
int thresh = 30; //当前阈值
int max_thresh = 175; //最大阈值
void on_CornerHarris(int, void*);//回调函数
int main(int argc, char** argv)
{
g_srcImage = imread("lol19.jpg", 1);
if (!g_srcImage.data)
{
printf("读取图片错误! \n");
return -1;
}
imshow("原始图", g_srcImage);
g_srcImage1 = g_srcImage.clone();
//存留一张灰度图
cvtColor(g_srcImage1, g_grayImage, CV_BGR2GRAY);
//创建窗口和滚动条
namedWindow("角点检测", CV_WINDOW_AUTOSIZE);
createTrackbar("阈值: ", "角点检测", &thresh, max_thresh, on_CornerHarris);
//调用一次回调函数,进行初始化
on_CornerHarris(0, 0);
waitKey(0);
return(0);
}
void on_CornerHarris(int, void*)
{
Mat dstImage;//目标图
Mat normImage;//归一化后的图
Mat scaledImage;//线性变换后的八位无符号整型的图
//置零当前需要显示的两幅图,即清除上一次调用此函数时他们的值
dstImage = Mat::zeros(g_srcImage.size(), CV_32FC1);
g_srcImage1 = g_srcImage.clone();
//进行角点检测
//第三个参数表示邻域大小,第四个参数表示Sobel算子孔径大小,第五个参数表示Harris参数
cornerHarris(g_grayImage, dstImage, 2, 3, 0.04, BORDER_DEFAULT);
// 归一化与转换
normalize(dstImage, normImage, 0, 255, NORM_MINMAX, CV_32FC1, Mat());
convertScaleAbs(normImage, scaledImage);//将归一化后的图线性变换成8位无符号整型
// 将检测到的,且符合阈值条件的角点绘制出来
for (int j = 0; j < normImage.rows; j++)
{
for (int i = 0; i < normImage.cols; i++)
{
//Mat::at<float>(j,i)获取像素值,并与阈值比较
if ((int)normImage.at<float>(j, i) > thresh + 80)
{
circle(g_srcImage1, Point(i, j), 5, Scalar(10, 10, 255), 2, 8, 0);
circle(scaledImage, Point(i, j), 5, Scalar(0, 10, 255), 2, 8, 0);
}
}
}
imshow("角点检测", g_srcImage1);
imshow("角点检测2", scaledImage);
}
先看看原始图
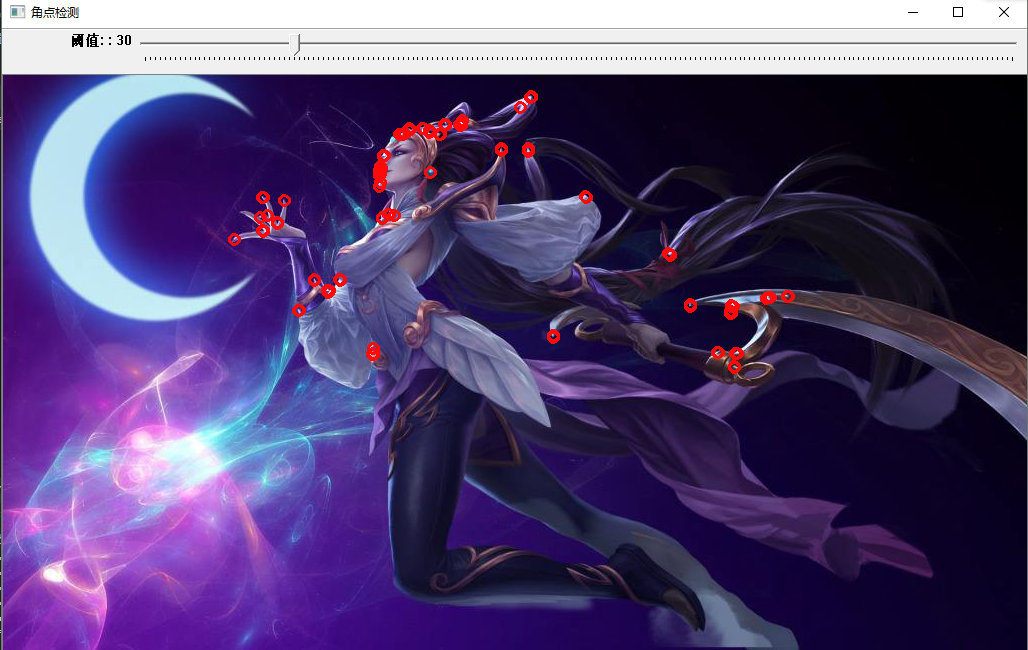
开始检测,我把阈值设为30,检测到角点还挺多的。
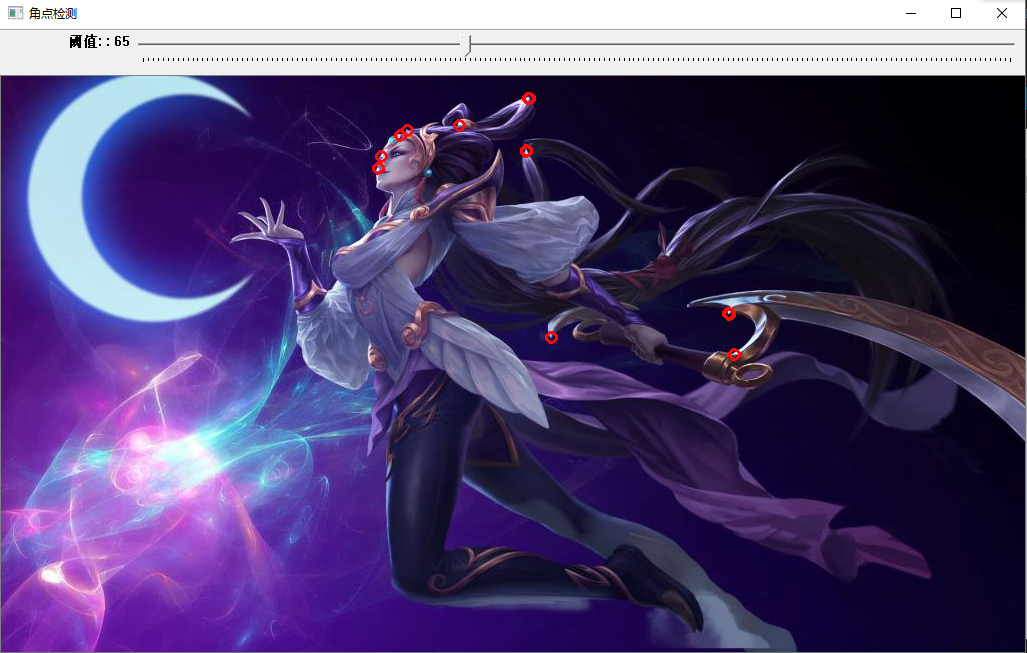
我把阈值进一步提高,角点变少了。认真观察一下,是不是检测到的点都是一些亮度明显变化的临界点?比如由黑变白的边界点。
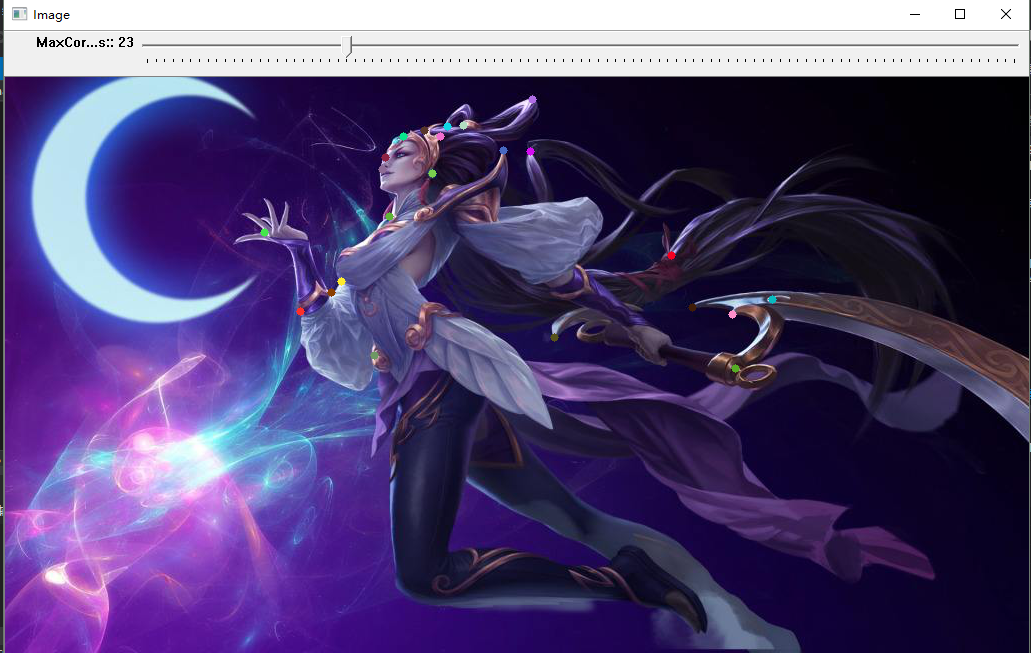
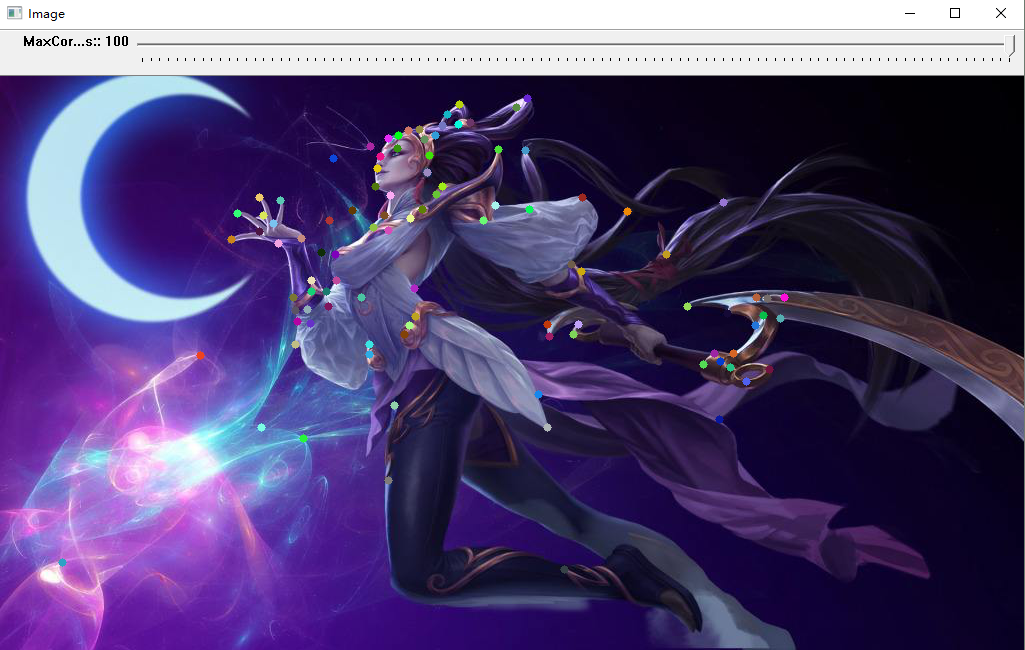
Shi-Tomasi角点检测
除了上述的Harris角点检测方法,我们还可以采用Shi-Tomasi方法进行角点检测。Shi-Tomsi算法是Harris算法的加强版,性能当然也有相应的提高。
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
using namespace cv;
using namespace std;
Mat src, src_gray;
int maxCorners = 23;
int maxTrackbar = 100;
RNG rng(12345); //RNG:random number generator,随机数产生器
char* source_window = "Image";
void goodFeaturesToTrack_Demo(int, void*);
int main()
{
//转化为灰度图
src = imread("lol19.jpg", 1);
cvtColor(src, src_gray, CV_BGR2GRAY);
namedWindow(source_window, CV_WINDOW_AUTOSIZE);
//创建trackbar
createTrackbar("MaxCorners:", source_window, &maxCorners, maxTrackbar, goodFeaturesToTrack_Demo);
imshow(source_window, src);
goodFeaturesToTrack_Demo(0, 0);
waitKey(0);
return(0);
}
void goodFeaturesToTrack_Demo(int, void*)
{
if (maxCorners < 1) { maxCorners = 1; }
//初始化 Shi-Tomasi algorithm的一些参数
vector<Point2f> corners;
double qualityLevel = 0.01;
double minDistance = 10;
int blockSize = 3;
bool useHarrisDetector = false;
double k = 0.04;
//给原图做一次备份
Mat copy;
copy = src.clone();
// 角点检测
goodFeaturesToTrack(src_gray,corners,maxCorners,qualityLevel,minDistance,Mat(),blockSize,useHarrisDetector,k);
//画出检测到的角点
cout << "** Number of corners detected: " << corners.size() << endl;
int r = 4;
for (int i = 0; i < corners.size(); i++)
{
circle(copy, corners[i], r, Scalar(rng.uniform(0, 255), rng.uniform(0, 255),
rng.uniform(0, 255)), -1, 8, 0);
}
namedWindow(source_window, CV_WINDOW_AUTOSIZE);
imshow(source_window, copy);
}
OpenCV探索之路(十五):角点检测的更多相关文章
- opencv笔记6:角点检测
time:2015年10月09日 星期五 23时11分58秒 # opencv笔记6:角点检测 update:从角点检测,学习图像的特征,这是后续图像跟踪.图像匹配的基础. 角点检测是什么鬼?前面一篇 ...
- cv2.cornerHarris()详解 python+OpenCV 中的 Harris 角点检测
参考文献----------OpenCV-Python-Toturial-中文版.pdf 参考博客----------http://www.bubuko.com/infodetail-2498014. ...
- Opencv学习笔记------Harris角点检测
image算法测试iteratoralgorithmfeatures 原创文章,转载请注明出处:http://blog.csdn.net/crzy_sparrow/article/details/73 ...
- OpenCV教程(43) harris角的检测(1)
计算机视觉中,我们经常要匹配两幅图像.匹配的的方式就是通过比较两幅图像中的公共特征,比如边,角,以及图像块(blob)等,来对两幅图像进行匹配. 相对于边,角更适合描述图像特征, ...
- OpenCV定制化创建角点检测子
定制化创建角点检测子 目标 在这个教程中我们将涉及: 使用 OpenCV 函数 cornerEigenValsAndVecs 来计算像素对应的本征值和本征向量来确定其是否是角点. 使用OpenCV 函 ...
- opencv亚像素级角点检测
一般角点检测: harris cv::cornerHarris() shi-tomasi cv::goodFeaturesToTrack() 亚像素级角点检测是在一般角点检测基础之上将检测出的角点精确 ...
- Python+OpenCV图像处理(十五)—— 圆检测
简介: 1.霍夫圆变换的基本原理和霍夫线变换原理类似,只是点对应的二维极径.极角空间被三维的圆心和半径空间取代.在标准霍夫圆变换中,原图像的边缘图像的任意点对应的经过这个点的所有可能圆在三维空间用圆心 ...
- OpenCV教程(45) harris角的检测(3)
在前面一篇教程中,我们通过取局部最大值的方法来处理检测结果,但是从图像中可以看到harris角的分布并不均匀,在纹理颜色比较深的地方检测的harris角结果更密集一些.本章中,我们使用一个 ...
- OpenCV教程(44) harris角的检测(2)
在上一篇教程中,我们得到的harris特征角二值图中,角的数目特别多,本章我们用一个局部最大化的方法,只保留局部值最大的harris特征角. // Harris角计算 cv::corner ...
- OpenCV探索之路(五):图片缩放和图像金字塔
对图像进行缩放的最简单方法当然是调用resize函数啦! resize函数可以将源图像精确地转化为指定尺寸的目标图像. 要缩小图像,一般推荐使用CV_INETR_AREA来插值:若要放大图像,推荐使用 ...
随机推荐
- JavaWeb总结(五)—Cookie
一.会话 1.提出问题 HTTP协议是一种无状态的协议.Web服务器本身不能识别哪些请求是同一浏览器发出的,浏览器的每一次请求都是孤立的.即使HTTP1.1支持持续连接,但当用户有一段时间没有提交请求 ...
- MySQL读写分离技术
1.简介 当今MySQL使用相当广泛,随着用户的增多以及数据量的增大,高并发随之而来.然而我们有很多办法可以缓解数据库的压力.分布式数据库.负载均衡.读写分离.增加缓存服务器等等.这里我们将采用读写分 ...
- 【canvas系列】canvas实现“ 简单的Amaziograph效果”--画对称图
标题很难引人入胜,先放个效果图好了 如果图片吸引不了你,那我觉得也就没啥看的了. demo链接: https://win7killer.github.io/can_demo/demo/draw_rol ...
- app专项测试自动化测试方法思路与实现
秉着个人意愿打算把python+rf接口自动进行彻底结束再做些其它方面的输出~但事与愿违,但领导目前注重先把专项测试方面完成,借此,先暂停python+rf(主要是与Jenkins集成+导入DB+微信 ...
- Git托管
前面的话 本文将主要介绍如何使用Github来托管Git服务 SSH 大多数Git服务器都会选择使用SSH公钥来进行授权.系统中的每个用户都必须提供一个公钥用于授权 首先先确认一下是否已经有一个公钥了 ...
- npm安装
淘宝镜像http://npm.taobao.org/ $ npm install -g cnpm --registry=https://registry.npm.taobao.org mac下 sud ...
- SQL Server数据库的存储过程中定义的临时表,真的有必要显式删除临时表(drop table #tableName)吗?
本文出处:http://www.cnblogs.com/wy123/p/6704619.html 问题背景 在写SQL Server存储过程中,如果存储过程中定义了临时表,有些人习惯在存储过程结束的时 ...
- 学习MVC之租房网站(三)-编写实体类并创建数据库
在上一篇<学习MVC之租房网站(二)-框架搭建及准备工作>中,搭建好了项目框架,并配置了EF.Log4Net和进程外Session.接下来会编写Eneity类并采用CodeFirst的方式 ...
- 【react学习】关于react框架使用的一些细节要点的思考
( _(:3 」∠)_给园友们提个建议,无论是API文档还是书籍,一定要多看几遍!特别是隔一段时间后,会有意想不到的收获的) 这篇文章主要是写关于学习react中的一些自己的思考: 1.set ...
- appium执行iOS测试脚本并发问题
appium1.4.X+iOS9.X+xcode7.X: appium1.4.x+iOS9.x+xcode7.x,这一整套的配置做移动端自动化测试是测试人员常用的测试框架.关于,这一套测试框架的并发问 ...