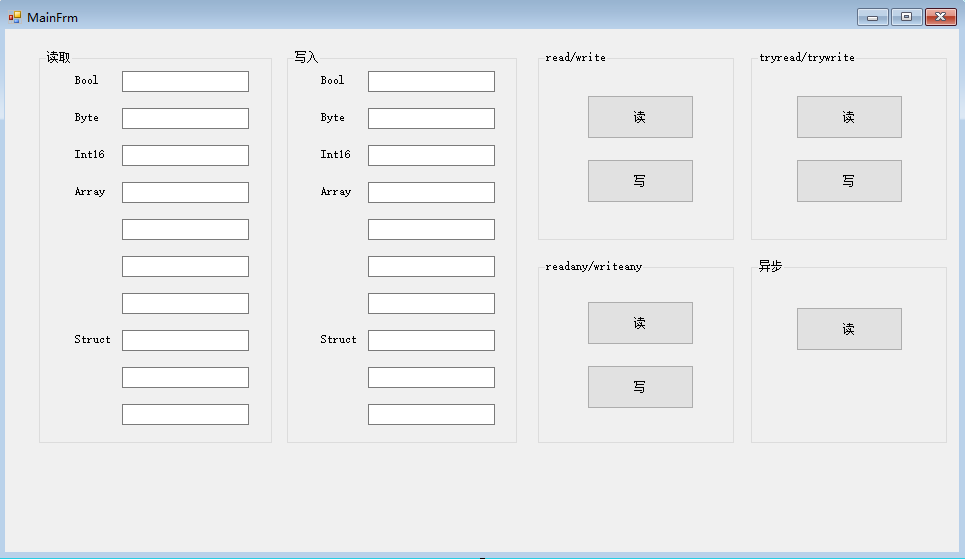
AdsStream的使用
本例子是测试ads通信的。
1.首先添加TwinCAT.Ads引用
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Diagnostics;
using System.Drawing;
using System.Linq;
using System.Reflection;
using System.Runtime.InteropServices;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
using TwinCAT.Ads;
namespace AdsProject
{
public partial class Main : Form
{
public TcAdsClient _client = null;
//创建句柄
public int _handleBool = 0;
public int _handleByte = 0;
public int _handleInt = 0;
public int _handleArray= 0;//int
public int _handleStruct = 0;//int16 byte real(2+1+4=7) (plc中的Int对应的C#中的int16,Dint对应int,real对应float,lreal对应double,Dword对应uint32)
public int _handleStruct2 = 0;//高级结构体句柄 public int _notificationHandleInt = 0;
public int _notificationHandleStruct = 0;
public int _notificationHandleStruct2 = 0; [StructLayout(LayoutKind.Sequential, Pack = 8)]
struct TestStruct
{
[MarshalAs(UnmanagedType.I2)]
public Int16 nData;
[MarshalAs(UnmanagedType.I1)]
public byte byVal;
[MarshalAs(UnmanagedType.R4)]
public float fVal;
} public Main()
{
InitializeComponent();
}
private void Main_Load(object sender, EventArgs e)
{
try
{
if (_client == null)
{
_client = new TcAdsClient();
} //Occurs when the ADS device sends a ADS Notification(通知) to the client.
//当PLC发送数据给客户端的时候触发回调函数
//回调方式1
_client.AdsNotification += new AdsNotificationEventHandler(AdsNotificationEventOnChange);
//回调方式2
_client.AdsNotificationEx += new AdsNotificationExEventHandler(AdsNotificationEventOnChangeEx);
_client.Connect(851);
_handleBool = _client.CreateVariableHandle("MAIN.Data_Bool");
_handleByte = _client.CreateVariableHandle("MAIN.Data_Byte");
_handleInt = _client.CreateVariableHandle("MAIN.Data_Int");
_handleArray = _client.CreateVariableHandle("MAIN.Data_Array");
_handleStruct = _client.CreateVariableHandle("MAIN.Data_Struct");
_handleStruct2 = _client.CreateVariableHandle("GVL.stAxis");
}
catch(Exception ex)
{
MessageBox.Show(ex.Message);
} } //回调函数2:当设备向客户端发送数据的时候触发
private void AdsNotificationEventOnChangeEx(object sender, AdsNotificationExEventArgs e)
{
if (e.NotificationHandle == _notificationHandleInt)
{
Debug.WriteLine(e.Value.ToString());
this.BeginInvoke(new Action(() =>
{
this.txtReadInt.Text = e.Value.ToString();
}));
}
else if (e.NotificationHandle == _notificationHandleStruct)
{
TestStruct testc = (TestStruct)e.Value;
Debug.WriteLine(testc.nData.ToString());
Debug.WriteLine(testc.byVal.ToString());
Debug.WriteLine(testc.fVal.ToString());
//因为是跨线程操作
this.BeginInvoke(new Action(() =>
{
this.txtReadStructInt16.Text = testc.nData.ToString();
this.txtReadStructByte.Text = testc.byVal.ToString();
this.txtReadStructFloat.Text = testc.fVal.ToString();
}));
}
//读取高级结构体
else if (e.NotificationHandle==_notificationHandleStruct2)
{
Plc_StAxisInfo plcStAxis = new Plc_StAxisInfo();
plcStAxis = (Plc_StAxisInfo)e.Value;
foreach (Plc_StAxis plc_StAxis in plcStAxis.Axis)
{
//获取结构体中的所有字段
FieldInfo[] fieldInfos = typeof(Plc_StAxis).GetFields();
int FieldCount = fieldInfos.Length;
for(int i=0;i< FieldCount;i++)
{
if (fieldInfos[i].FieldType.Name == "Byte[]")
{
byte[] b = (byte[])fieldInfos[i].GetValue(plc_StAxis);
foreach (var item in b)
{
Debug.WriteLine(item.ToString());
}
}
else if (fieldInfos[i].FieldType.Name == "Double[]")
{
double[] d = (double[])fieldInfos[i].GetValue(plc_StAxis);
foreach (var item in d)
{
Debug.WriteLine(item.ToString());
}
}
else
{
//获取字段值
Debug.WriteLine(fieldInfos[i].GetValue(plc_StAxis));
}
}
}
}
} //回调函数1:当设备向客户端发送数据的时候触发
private void AdsNotificationEventOnChange(object sender, AdsNotificationEventArgs e)
{
//AdsBinaryReader reader = new AdsBinaryReader(e.DataStream);
//if (e.NotificationHandle == _notificationHandleInt)
// Debug.WriteLine(reader.ReadInt16());
//else if (e.NotificationHandle == _notificationHandleStruct)
//{
// Debug.WriteLine(reader.ReadInt16());
// Debug.WriteLine(reader.ReadByte());
// reader.ReadByte();
// Debug.WriteLine(reader.ReadSingle());
//}
} //read
private void btnRead_Click(object sender, EventArgs e)
{
AdsStream stream = new AdsStream(100);
AdsBinaryReader reader = new AdsBinaryReader(stream);
_client.Read(_handleBool,stream);//读取设备中的数据并写入到文件流stream中
txtReadBool.Text = reader.ReadBoolean().ToString();//从当前文件流中读取Boolean值,并使当前流的位置提升1个字节 _client.Read(_handleByte, stream);
stream.Seek(0,System.IO.SeekOrigin.Begin);//设定流的位置为开头
txtReadByte.Text = reader.ReadByte().ToString();//从当前文件流中读取Boolean值,并使当前流的位置提升1个字节 _client.Read(_handleInt, stream);
stream.Seek(0, System.IO.SeekOrigin.Begin);//设定流的位置为开头
txtReadInt.Text = reader.ReadInt16().ToString();//从当前文件流中读取Boolean值,并使当前流的位置提升2个字节 _client.Read(_handleArray,stream);
stream.Seek(0, System.IO.SeekOrigin.Begin);//设定流的位置为开头
txtReadArrayInt1.Text = reader.ReadInt16().ToString();//从当前文件流中读取Boolean值,并使当前流的位置提升2个字节
txtReadArrayInt2.Text = reader.ReadInt16().ToString();
txtReadArrayInt3.Text = reader.ReadInt16().ToString();
txtReadArrayInt4.Text = reader.ReadInt16().ToString(); _client.Read(_handleStruct,stream);
stream.Seek(0,System.IO.SeekOrigin.Begin);
txtReadStructInt16.Text = reader.ReadInt16().ToString();
txtReadStructByte.Text = reader.ReadByte().ToString();
reader.ReadByte();//前面Int16是两个字节,byte是一个字节,一共三个字节,而float是占四个字节,要从第五个字节开始读,所以要再读第四个字节,然后跳到第五个字节
txtReadStructFloat.Text = reader.ReadSingle().ToString(); } //write
private void btnWrite_Click(object sender, EventArgs e)
{
try
{
AdsStream stream = new AdsStream(100);
AdsBinaryWriter writer = new AdsBinaryWriter(stream); writer.Write(Boolean.Parse(txtWriteBool.Text));
_client.Write(_handleBool, stream, 0, 1); stream.Seek(0, System.IO.SeekOrigin.Begin);//设定流的位置为开头
writer.Write(Byte.Parse(txtWriteByte.Text));
_client.Write(_handleByte, stream, 0, 1); stream.Seek(0, System.IO.SeekOrigin.Begin);//设定流的位置为开头
writer.Write(Int16.Parse(txtWriteInt.Text));
_client.Write(_handleInt, stream, 0, 2); stream.Seek(0, System.IO.SeekOrigin.Begin);//设定流的位置为开头
writer.Write(Int16.Parse(txtWriteArrayInt1.Text));
writer.Write(Int16.Parse(txtWriteArrayInt2.Text));
writer.Write(Int16.Parse(txtWriteArrayInt3.Text));
writer.Write(Int16.Parse(txtWriteArrayInt4.Text));
_client.Write(_handleArray, stream, 0, 8); stream.Seek(0, System.IO.SeekOrigin.Begin);
writer.Write(Int16.Parse(txtWriteStructInt16.Text));
writer.Write(Byte.Parse(txtWriteStructByte.Text));
writer.Write((Byte)0);//写入第四个字节
writer.Write(float.Parse(txtWriteStructFloat.Text));
_client.Write(_handleStruct, stream, 0, 8); }
catch (Exception ex)
{
MessageBox.Show(ex.Message);
}
} //readany
private void btnReadAny_Click(object sender, EventArgs e)
{
try
{
txtReadBool.Text = _client.ReadAny(_handleBool, typeof(Boolean)).ToString();
txtReadByte.Text = _client.ReadAny(_handleByte, typeof(Byte)).ToString();
txtReadInt.Text = _client.ReadAny(_handleInt, typeof(Int16)).ToString();
//从设备中读取short[]
short[] testint = (short[])_client.ReadAny(_handleArray, typeof(short[]),new int[] { 4});
txtReadArrayInt1.Text = testint[0].ToString();
txtReadArrayInt2.Text = testint[1].ToString();
txtReadArrayInt3.Text = testint[2].ToString();
txtReadArrayInt4.Text = testint[3].ToString();
// //从设备中读取TestStruct
TestStruct tstruct = (TestStruct)_client.ReadAny(_handleStruct, typeof(TestStruct));
txtReadStructInt16.Text = tstruct.nData.ToString();
txtReadStructByte.Text = tstruct.byVal.ToString();
txtReadStructFloat.Text = tstruct.fVal.ToString();
}
catch (Exception ex) {
MessageBox.Show(ex.Message);
}
} //writeany
private void btnWriteAny_Click(object sender, EventArgs e)
{
short[] arraytest = new short[4]
{
short.Parse(txtWriteArrayInt1.Text),
short.Parse(txtWriteArrayInt2.Text),
short.Parse(txtWriteArrayInt3.Text),
short.Parse(txtWriteArrayInt4.Text)
};
TestStruct tstruct = new TestStruct();
tstruct.nData = Int16.Parse(txtWriteStructInt16.Text);
tstruct.byVal = Byte.Parse(txtWriteStructByte.Text);
tstruct.fVal = float.Parse(txtWriteStructFloat.Text); _client.WriteAny(_handleBool, Boolean.Parse(txtWriteBool.Text));//写入值到设备中
_client.WriteAny(_handleByte, Byte.Parse(txtWriteByte.Text));//写入值到设备中
_client.WriteAny(_handleInt, Int16.Parse(txtWriteInt.Text));//写入值到设备中
_client.WriteAny(_handleArray, arraytest);//写入值到设备中
_client.WriteAny(_handleStruct, tstruct);//写入值到设备中
}
//tryread
private void btnTryRead_Click(object sender, EventArgs e)
{
int readBytes = 0;
AdsStream stream = new AdsStream(100);
AdsBinaryReader reader = new AdsBinaryReader(stream);
//tryread函数如果读不出来将会返回errorcode,而不是抛出异常
AdsErrorCode code = _client.TryRead((uint)AdsReservedIndexGroups.SymbolValueByHandle, (uint)_handleBool, stream, out readBytes);
txtReadBool.Text = reader.ReadBoolean().ToString(); stream.Seek(0, System.IO.SeekOrigin.Begin);
_client.TryRead((uint)AdsReservedIndexGroups.SymbolValueByHandle, (uint)_handleInt, stream, out readBytes);
txtReadInt.Text = reader.ReadInt16().ToString(); stream.Seek(0, System.IO.SeekOrigin.Begin);
_client.TryRead((uint)AdsReservedIndexGroups.SymbolValueByHandle, (uint)_handleByte, stream, out readBytes);
txtReadByte.Text = reader.ReadByte().ToString(); stream.Seek(0, System.IO.SeekOrigin.Begin);
_client.TryRead((uint)AdsReservedIndexGroups.SymbolValueByHandle, (uint)_handleStruct, stream, out readBytes);
txtReadStructInt16.Text = reader.ReadInt16().ToString();
txtReadStructByte.Text = reader.ReadByte().ToString();
reader.ReadByte();
txtReadStructFloat.Text = reader.ReadSingle().ToString(); _client.TryRead((uint)AdsReservedIndexGroups.SymbolValueByHandle, (uint)_handleArray, stream, out readBytes);
stream.Seek(0, System.IO.SeekOrigin.Begin);
txtReadArrayInt1.Text = reader.ReadInt16().ToString();
txtReadArrayInt2.Text = reader.ReadInt16().ToString();
txtReadArrayInt3.Text = reader.ReadInt16().ToString();
txtReadArrayInt4.Text = reader.ReadInt16().ToString();
}
//trywrite
private void btnTryWrite_Click(object sender, EventArgs e)
{
AdsStream stream = new AdsStream(100);
AdsBinaryWriter writer = new AdsBinaryWriter(stream);
//trywrite函数如果读不出来将会返回errorcode,而不是抛出异常
writer.Write(Boolean.Parse(txtWriteBool.Text));
AdsErrorCode code1 = _client.TryWrite((uint)AdsReservedIndexGroups.SymbolValueByHandle, (uint)_handleBool, stream,0,1); stream.Seek(0, System.IO.SeekOrigin.Begin);
writer.Write(Byte.Parse(txtWriteByte.Text));
AdsErrorCode code2 = _client.TryWrite((uint)AdsReservedIndexGroups.SymbolValueByHandle, (uint)_handleByte, stream, 0, 1); stream.Seek(0, System.IO.SeekOrigin.Begin);
writer.Write(Int16.Parse(txtWriteInt.Text));
AdsErrorCode code3 = _client.TryWrite((uint)AdsReservedIndexGroups.SymbolValueByHandle, (uint)_handleInt, stream, 0, 2); stream.Seek(0, System.IO.SeekOrigin.Begin);
writer.Write(Int16.Parse(txtWriteArrayInt1.Text));
writer.Write(Int16.Parse(txtWriteArrayInt2.Text));
writer.Write(Int16.Parse(txtWriteArrayInt3.Text));
writer.Write(Int16.Parse(txtWriteArrayInt4.Text));
AdsErrorCode code4 = _client.TryWrite((uint)AdsReservedIndexGroups.SymbolValueByHandle, (uint)_handleArray, stream, 0, 8); stream.Seek(0, System.IO.SeekOrigin.Begin);
writer.Write(Int16.Parse(txtWriteStructInt16.Text));
writer.Write(Byte.Parse(txtWriteStructByte.Text));
writer.Write((Byte)0);//写入第四个字节
writer.Write(float.Parse(txtWriteStructFloat.Text));
AdsErrorCode code5 = _client.TryWrite((uint)AdsReservedIndexGroups.SymbolValueByHandle, (uint)_handleStruct, stream, 0, 8);
} private void btnAsyncRead_Click(object sender, EventArgs e)
{
//启动回调
_notificationHandleInt = _client.AddDeviceNotificationEx("MAIN.Data_Int", AdsTransMode.OnChange, 1, 0, this, typeof(short));
_notificationHandleStruct = _client.AddDeviceNotificationEx("MAIN.Data_Struct", AdsTransMode.OnChange, 1, 0, this, typeof(TestStruct)); } private void Main_FormClosed(object sender, FormClosedEventArgs e)
{
if (_client != null)
{
_client.Disconnect();
}
_client.Dispose();
} //利用回调的方式读取高级结构体数据
private void btn_ReadStruct_Click_1(object sender, EventArgs e)
{
_notificationHandleStruct2 = _client.AddDeviceNotificationEx("GVL.stAxis", AdsTransMode.OnChange, 1, 0, this, typeof(Plc_StAxisInfo)); } //写高级结构体
private void btn_WriteStruct_Click(object sender, EventArgs e)
{
Plc_StAxisInfo plcStAxis = new Plc_StAxisInfo();
plcStAxis.Axis = new Plc_StAxis[10];
plcStAxis.Axis[0].ToDriverIO = 26;
plcStAxis.Axis[1].ToDriverIO = 36;
plcStAxis.Axis[2].ToDriverIO = 46;
plcStAxis.Axis[3].ToDriverIO = 56;
plcStAxis.Axis[4].ToDriverIO = 66;
plcStAxis.Axis[5].ToDriverIO = 76;
plcStAxis.Axis[6].ToDriverIO = 86;
plcStAxis.Axis[7].ToDriverIO = 96;
plcStAxis.Axis[8].ToDriverIO = 106;
_client.WriteAny(_handleStruct2, plcStAxis);//写入值到设备中
} //readonly方式
private void btnReadAnyStruct_Click(object sender, EventArgs e)
{
Plc_StAxisInfo plcStAxis = (Plc_StAxisInfo)_client.ReadAny(_handleStruct2, typeof(Plc_StAxisInfo));
foreach (Plc_StAxis plc_StAxis in plcStAxis.Axis)
{
//获取结构体中的所有字段
FieldInfo[] fieldInfos = typeof(Plc_StAxis).GetFields();
int FieldCount = fieldInfos.Length;
for (int i = 0; i < FieldCount; i++)
{
if (fieldInfos[i].FieldType.Name == "Byte[]")
{
byte[] b = (byte[])fieldInfos[i].GetValue(plc_StAxis);
foreach (var item in b)
{
Debug.WriteLine(item.ToString());
}
}
else if (fieldInfos[i].FieldType.Name == "Double[]")
{
double[] d = (double[])fieldInfos[i].GetValue(plc_StAxis);
foreach (var item in d)
{
Debug.WriteLine(item.ToString());
}
}
else
{
//获取字段值
Debug.WriteLine(fieldInfos[i].GetValue(plc_StAxis));
}
}
}
}
}
}
using System;
using System.Collections.Generic;
using System.Linq;
using System.Runtime.InteropServices;
using System.Text;
using System.Threading.Tasks; namespace AdsProject
{
//对于一些超复杂的结构体,使用普通DataStream是很难读取的,比较方便的方式是申请一个同等大小的结构体,然后用readany读取
//PLC-->c#:BOOL--->bool, UINT--->Uint16, DWORD--->int32,LREAL-->Double,UDINT--->Uint32,ARRAY--->数组 [StructLayout(LayoutKind.Sequential, Pack = 8)]
public struct Plc_StAxis
{
//UINT
[MarshalAs(UnmanagedType.U2)]
public UInt16 DriverIO;
[MarshalAs(UnmanagedType.U2)]
public UInt16 DriverErrorID; //BOOL
[MarshalAs(UnmanagedType.I1)]
public bool Q_Brake;
[MarshalAs(UnmanagedType.I1)]
public bool AxisCamDog1;
[MarshalAs(UnmanagedType.I1)]
public bool AxisCamDog2;
[MarshalAs(UnmanagedType.I1)]
public bool LimitP;
[MarshalAs(UnmanagedType.I1)]
public bool LimitN;
[MarshalAs(UnmanagedType.I1)]
public bool HOME;
[MarshalAs(UnmanagedType.I1)]
public bool HomingDirection;
[MarshalAs(UnmanagedType.I1)]
public bool EXT1; //DWORD
[MarshalAs(UnmanagedType.U4)]
public UInt32 ToDriverIO; //BOOL
[MarshalAs(UnmanagedType.I1)]
public bool ServoOn_HMI;
[MarshalAs(UnmanagedType.I1)]
public bool ServoOnInt;
[MarshalAs(UnmanagedType.I1)]
public bool Homing_HMI;
[MarshalAs(UnmanagedType.I1)]
public bool HomingInt;
[MarshalAs(UnmanagedType.I1)]
public bool BrakeBtn_HMI;
[MarshalAs(UnmanagedType.I1)]
public bool Inch_HMI;
[MarshalAs(UnmanagedType.I1)]
public bool JogF_HMI;
[MarshalAs(UnmanagedType.I1)]
public bool JogB_HMI;
[MarshalAs(UnmanagedType.I1)]
public bool StationIni;
[MarshalAs(UnmanagedType.I1)]
public bool AutoPStart_HMI;
[MarshalAs(UnmanagedType.I1)]
public bool StopCond;
[MarshalAs(UnmanagedType.I1)]
public bool ServoOn_L;
[MarshalAs(UnmanagedType.I1)]
public bool OriginOk_L;
[MarshalAs(UnmanagedType.I1)]
public bool SingleCycle;
[MarshalAs(UnmanagedType.I1)]
public bool Busy; //LREAL
[MarshalAs(UnmanagedType.R8)]
public double ActPos;
[MarshalAs(UnmanagedType.R8)]
public double AutoPosition; //DWORD
[MarshalAs(UnmanagedType.U4)]
public UInt32 Alarm1;
//DINT
[MarshalAs(UnmanagedType.U4)]
public UInt32 ErrorID; //BOOL
[MarshalAs(UnmanagedType.I1)]
public bool ActionEnable; //轴可动作
[MarshalAs(UnmanagedType.I1)]
public bool ActionM; //轴手动基本条件
[MarshalAs(UnmanagedType.I1)]
public bool PosEnable;
[MarshalAs(UnmanagedType.I1)]
public bool PosEnableM;
[MarshalAs(UnmanagedType.I1)]
public bool BackAutoPosEN;
[MarshalAs(UnmanagedType.I1)]
public bool Homing; //轴回原点
[MarshalAs(UnmanagedType.I1)]
public bool MotionMethod; //轴初始化回原点
[MarshalAs(UnmanagedType.I1)]
public bool ServoOn_M; //伺服ON
[MarshalAs(UnmanagedType.I1)]
public bool Inch_M; //寸动
[MarshalAs(UnmanagedType.I1)]
public bool JogF_M; //正向微动
[MarshalAs(UnmanagedType.I1)]
public bool JogB_M; //反向微动
[MarshalAs(UnmanagedType.I1)]
public bool AutoPStart_M; //轴自动停位启动
[MarshalAs(UnmanagedType.I1)]
public bool BrakeBtn_M; //刹车
[MarshalAs(UnmanagedType.I1)]
public bool GrabSafetyPos;
[MarshalAs(UnmanagedType.I1)]
public bool PlacedSafetyPos; // //ARRAY[1..10] OF BYTE
[MarshalAs(UnmanagedType.ByValArray, SizeConst = 10)]
public byte[] PosHandStart; //轴手动启动
[MarshalAs(UnmanagedType.ByValArray, SizeConst = 10)]
public byte[] PosHandStartM; //轴手动启动
[MarshalAs(UnmanagedType.ByValArray, SizeConst = 10)]
public byte[] PosAutoStart; //轴自动启动
[MarshalAs(UnmanagedType.ByValArray, SizeConst = 10)]
public byte[] PosStart_M; //轴启动
[MarshalAs(UnmanagedType.ByValArray, SizeConst = 10)]
public byte[] Position_L; //轴位指示
[MarshalAs(UnmanagedType.ByValArray, SizeConst = 10)]
public byte[] PosHandEnable; //轴手动条件 //LREAL
[MarshalAs(UnmanagedType.R8)]
public double VelocityTotal; //速度汇总
[MarshalAs(UnmanagedType.R8)]
public double OriginCompensation; //原点补偿
[MarshalAs(UnmanagedType.R8)]
public double InchingLength; //寸动长度
[MarshalAs(UnmanagedType.R8)]
public double Override; //速度倍率
[MarshalAs(UnmanagedType.R8)]
public double JogVelocity; //微动速度
[MarshalAs(UnmanagedType.R8)]
public double VelocityManual; //轴手动速度
[MarshalAs(UnmanagedType.R8)]
public double VelocityAuto; //轴自动速度
[MarshalAs(UnmanagedType.R8)]
public double VelocityAutoM; //轴自动速度M
[MarshalAs(UnmanagedType.R8)]
public double VelocityDebug; //调试速度
[MarshalAs(UnmanagedType.R8)]
public double HomingVelocity; //原点补偿与寸动速度
[MarshalAs(UnmanagedType.R8)]
public double ErrorRangeSet; //轴误差范围设定 [MarshalAs(UnmanagedType.I4)]
public Int32 AlarmCount; //报警计数 //ARRAY[1..10] OF LREAL
[MarshalAs(UnmanagedType.ByValArray, SizeConst = 10)]
public double[] PositionSet; //LREAL
[MarshalAs(UnmanagedType.R8)]
public double DTerminalVelocity; //对端子速度
[MarshalAs(UnmanagedType.R8)]
public double TerminalvelocityManual; //对端子手动速度
[MarshalAs(UnmanagedType.R8)]
public double TerminalvelocityAuto; //对端子自动速度 }
//GVL中的stAxis数组
[StructLayout(LayoutKind.Sequential, Pack = 8)]
public struct Plc_StAxisInfo
{
[MarshalAs(UnmanagedType.ByValArray, SizeConst = 10)]
public Plc_StAxis[] Axis;
}
}
倍福plc端
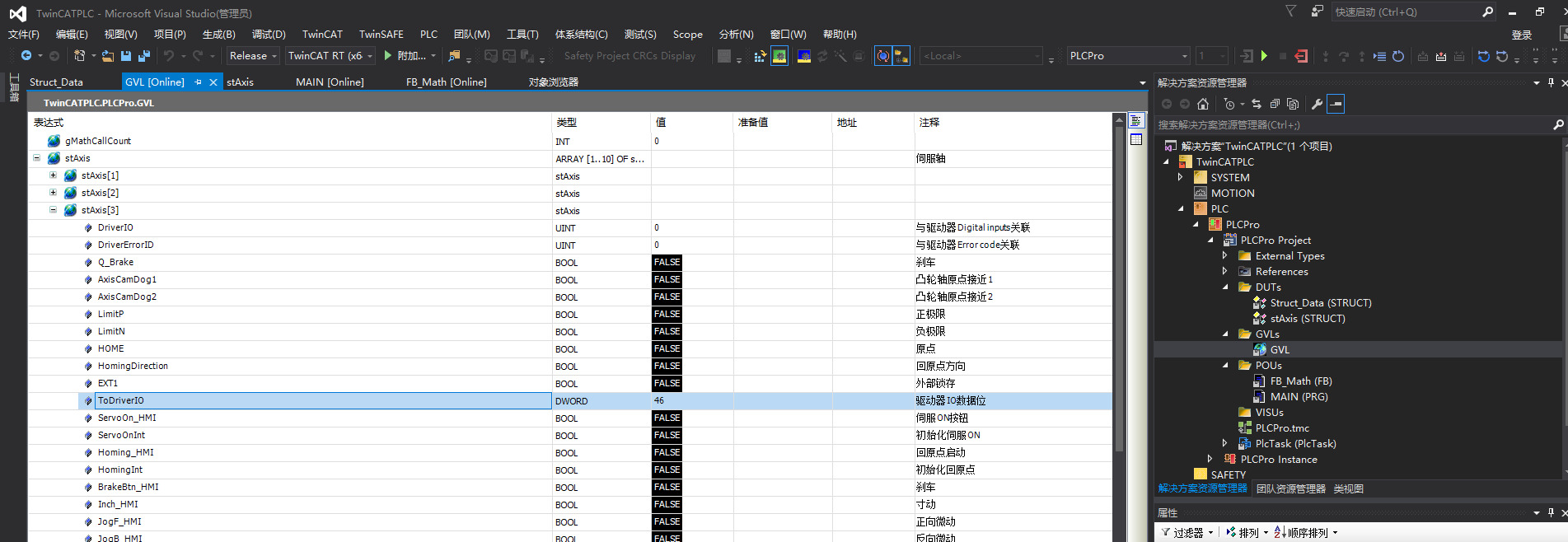
StAixis代码:
(********************************************************************)
//结构体数据说明:
//备注:
(********************************************************************) TYPE stAxis :
STRUCT
DriverIO AT%I*:UINT; //与驱动器Digital inputs关联
DriverErrorID AT%I*:UINT; //与驱动器Error code关联
// ModelOperation AT%Q*:SINT; //操作模式与驱动器Model of operation关联
Q_Brake AT%Q*:BOOL; //刹车
AxisCamDog1 AT%Q*:BOOL; //凸轮轴原点接近1
AxisCamDog2 AT%Q*:BOOL; //凸轮轴原点接近2
LimitP :BOOL; //正极限
LimitN :BOOL; //负极限
HOME :BOOL; //原点
HomingDirection :BOOL; //回原点方向
EXT1 :BOOL; //外部锁存
ToDriverIO :DWORD;//驱动器IO数据位 ServoOn_HMI :BOOL; //伺服ON按钮
ServoOnInt :BOOL; //初始化伺服ON
Homing_HMI :BOOL; //回原点启动
HomingInt :BOOL; //初始化回原点
BrakeBtn_HMI :BOOL; //刹车
Inch_HMI :BOOL; //寸动
JogF_HMI :BOOL; //正向微动
JogB_HMI :BOOL; //反向微动
StationIni :BOOL; //轴所在工位初始化中
AutoPStart_HMI :BOOL; //轴自动停位启动
StopCond :BOOL; //轴停止条件 ServoOn_L :BOOL; //伺服ON_L
OriginOk_L :BOOL; //原点OK标志
SingleCycle :BOOL; //轴所在工位单循环
Busy :BOOL; //轴忙
ActPos :LREAL;//轴当前实际位置
AutoPosition :LREAL;//轴自动停位
Alarm :DWORD; //报警:00伺服报警 01负极限异常 02正极限异常 03原点接近异常 04轴未找到原点 05轴不在自停位 06伺服驱动器异常 08轴未伺服On
ErrorID :UDINT; ActionEnable :BOOL; //轴可动作
ActionEnableM :BOOL; //轴可动作M
PosEnable :BOOL; //轴手动基本条件
PosEnableM :BOOL; //轴手动基本条件M
BackAutoPosEN :BOOL; //轴可自动回自停位
Homing :BOOL; //轴回原点
MotionMethod :BOOL; //运动方式 0相对1绝对
ServoOn_M :BOOL; //伺服ON
Inch_M :BOOL; //寸动
JogF_M :BOOL; //正向微动
JogB_M :BOOL; //反向微动
AutoPStart_M :BOOL; //轴自动停位启动
BrakeBtn_M :BOOL; //刹车 GrabSafetyPos :BOOL; //抓取安全位
PlacedSafetyPos :BOOL; //放料安全位 PosHandStart :ARRAY[1..10] OF BOOL; //轴手动启动
PosHandStartM :ARRAY[1..10] OF BOOL; //轴手动启动
PosAutoStart :ARRAY[1..10] OF BOOL; //轴自动启动
PosStart_M :ARRAY[1..10] OF BOOL; //轴启动
Position_L :ARRAY[1..10] OF BOOL; //轴位指示 PositionDone :BOOL; //轴动作完成 PosHandEnable :ARRAY[1..10] OF BOOL; //轴手动条件 VelocityTotal :LREAL;//速度汇总
//
originCompensation :LREAL;//原点补偿 InchLength :LREAL;//寸动长度
Override :LREAL;//速度倍率
JogVelocity :LREAL;//微动速度
VelocityManual :LREAL;//轴手动速度
VelocityAuto :LREAL;//轴自动速度
VelocityAutoM :LREAL;//轴自动速度M
VelocityDebug :LREAL;//调试速度
HomeVelocity :LREAL;//原点补偿与寸动速度
ErrorRangeSet :LREAL;//轴误差范围设定
AlarmCount :DINT; //报警计数 PositionSet :ARRAY[1..10] OF LREAL;//轴位置设置 DTerminalVelocity :LREAL;//对端子速度
TerminalvelocityManual :LREAL;//对端子手动速度
TerminalvelocityAuto :LREAL;//对端子自动速度
END_STRUCT
END_TYPE
Struct_Data结构体代码
TYPE Struct_Data :
STRUCT
StrData:INT:=45;
StrByte:BYTE:=45;
strFloat:REAL:=45.0;
END_STRUCT
END_TYPE
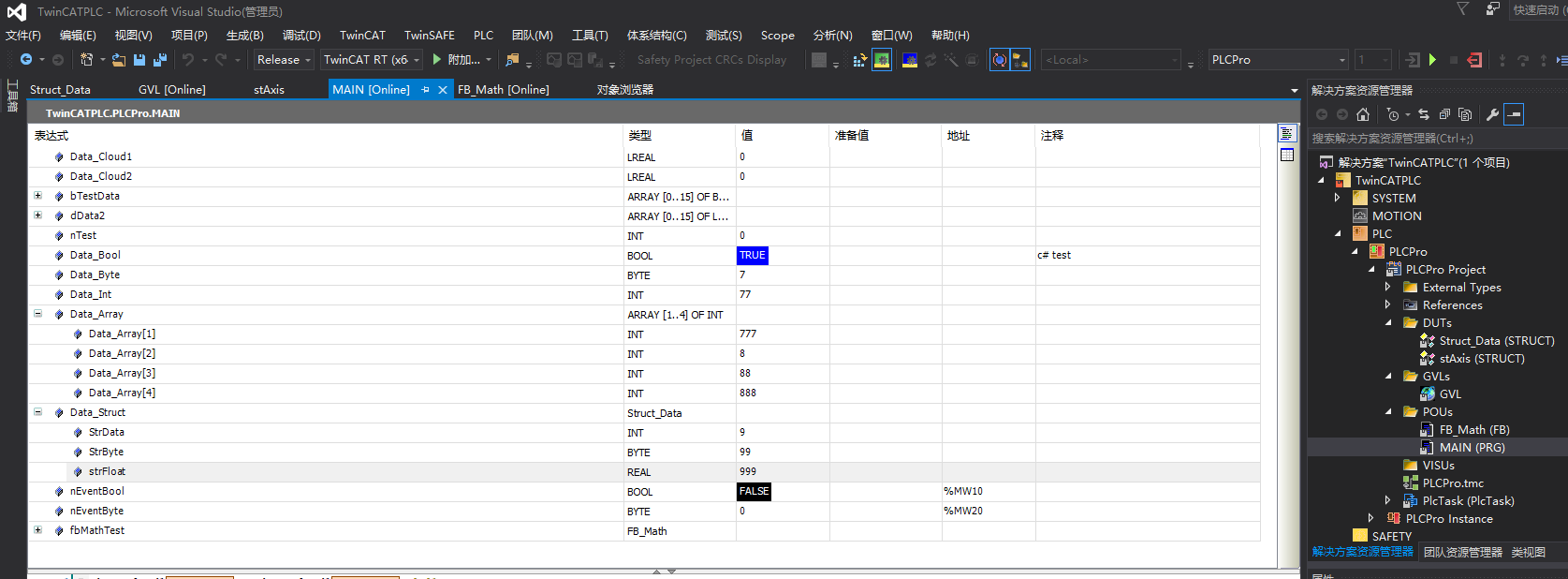
MAIN(PRO)代码:
PROGRAM MAIN
VAR
Data_Cloud1: LREAL := 0;
Data_Cloud2: LREAL := 0;
bTestData:ARRAY[0..15] OF BOOL;
dData2:ARRAY[0..15] OF LREAL;
nTest:INT:=0; //c# test
Data_Bool : BOOL:=TRUE;
Data_Byte : BYTE:=120;
Data_Int : INT:=45;
Data_Array : ARRAY [1..4] OF INT:=[256,128,456,789];
Data_Struct : Struct_Data; nEventBool AT %MW10: BOOL;
nEventByte AT %MW20: BYTE; fbMathTest:FB_Math;
END_VAR
AdsStream的使用的更多相关文章
- 倍福TwinCAT3上位机与PLC通信测试(ADS通信) 包含C#和C++代码
倍福TwinCAT3上位机与PLC通信测试(ADS通信) 包含C#和C++代码 本次测试需要环境: VS2013,TwinCAT3(本人版本TC31-Full-Setup.3.1.4018.16) 代 ...
- 倍福Ads协议通信测试
测试环境:vs2015 + TC31-Full-Setup.3.1.4022.30.exe 首先需要安装TC31-Full-Setup.3.1.4022.30.exe 本例子是用本机作测试,如果使用远 ...
随机推荐
- KingbaseES 数据脱敏功能介绍
数据脱敏,指对某些敏感信息通过脱敏规则进行数据的变形,实现敏感隐私数据的可靠保护. KingbaseES主要提供动态数据脱敏功能. 动态数据脱敏(Dynamic Data Masking)是与生产环境 ...
- 字符类数据类型和oracle字符类型的区别
为兼容Oracle的数据类型,KingbaseES扩展了Oracle的NUMBER.VARCHAR2.CHAR(n)和DATE类型.该措施使得移植Oracle的Create Table等DDL语句时, ...
- 《吐血整理》高级系列教程-吃透Fiddler抓包教程(23)-Fiddler如何优雅地在正式和测试环境之间来回切换-上篇
1.简介 在开发或者测试的过程中,由于项目环境比较多,往往需要来来回回地反复切换,那么如何优雅地切换呢?宏哥今天介绍几种方法供小伙伴或者童鞋们进行参考. 2.实际工作场景 2.1问题场景 (1)已发布 ...
- 谷歌MapReduce经典论文翻译(中英对照)
MapReduce: Simplified Data Processing on Large Clusters(MapReduce: 简化大型集群下的数据处理) 作者:Jeffrey Dean and ...
- Kibana可视化数据(Visualize)详解
可视化 (Visualize) 功能可以为您的 Elasticsearch 数据创建可视化控件.然后,您就可以创建仪表板将这些可视化控件整合到一起展示. Kibana 可视化控件基于 Elastics ...
- 查看pod对应的DNS域名
单个pod # kubectl exec redis-pod-0 -n cluster-redis -- hostname -f redis-pod-0.redis-cluster-service.c ...
- Kubernetes(k8s)为容器设置启动时要执行的命令和参数
创建 Pod 时设置命令及参数 创建 Pod 时,可以为其下的容器设置启动时要执行的命令及其参数.如果要设置命令,就填写在配置文件的 command 字段下,如果要设置命令的参数,就填写在配置文件的 ...
- 组件化开发3-cocoaPods私有库制作
一.创建索引项目ZHMCSSpec 1-1 在代码托管网站上建立索引项目ZHMCSSpec(以这个名称为例) 1-2 在本地创建ZHMCSSpec,并与远程索引建立联系 pod repo add ZH ...
- 【前端必会】NVM,管理你的node版本
介绍 用nvm管理node,可以随时修改node版本 使用 下载nvm https://github.com/coreybutler/nvm-windows/releases/tag/1.1.9 安装 ...
- PAT (Basic Level) Practice 1018 锤子剪刀布 分数 20
大家应该都会玩"锤子剪刀布"的游戏:两人同时给出手势,胜负规则如图所示: 现给出两人的交锋记录,请统计双方的胜.平.负次数,并且给出双方分别出什么手势的胜算最大. 输入格式: 输入 ...