图像处理基础知识:EMVA1288标准之“非均匀性”的理解
EMVA1288标准之“非均匀性”的理解
目录
1. 什么是图像的非均匀性?有标准吗?
2. EMVA1288的非均匀性内容。
3. 总结与理解
正文
1. 什么是图像的非均匀性?有标准吗?
简单来说,我们将相机对着一个均匀场景进行拍照时候,假定场景理想均匀,所有像素的灰度值也并非一致。这种个体之间的差异就是非均匀性。
怎么测试相机焦平面的不一致,控制变量法,先保证被拍物体的均匀的,实验室中我们采用积分球光源,它可以假定为是一种理想的绝对均匀光。
然后,我们需要对“均匀”进行定量的、系统的、数字化的评价,确实是一个问题。
这里我们采用欧洲机器视觉协会(EMVA)的1288标准,它是基于实验室标定测试的,是图像传感器与相机性能测试标准。对图像传感器非均匀性的定义与测试有着权威的解释。
2. EMVA1288的非均匀性内容
我自己概括一下就是:一个概念,两个形态,三个描述方式。
2.1 一个概念
对于一个像元阵列中不同像元的特性参数是不同的。有时这些不一致性被称为固定图形噪声(fixed pattern noise,FPN)。这种表达方法会产生一些误导,因为这种不一致性并不是使信号在时域发生变化的噪声,也许只是空间上的随机分布。最好的表达,应该是非均匀性,它是空间上的不一致。
2.2 两种基本形态
1) DSNU:Dark Signal Non-Uniformity。因不同像元的暗信号不同,称为暗信号非均匀性。
即:盖上镜头盖,像元的灰度值不一致。打个比方,几个人一起走正步,这是站的起点不一致。
2) PRNU:Photo Response Non-Uniformity。因不同像元的灵敏度不同,称为光响应非均匀性。
即:相机拍均匀光物体,调整整个光强,每个像元的灰度变化值不一致。打个比方,几个人一起走正步,这是每个人迈的步子大小不一样。
2.3 三种描述方式
2.3.1 空间方差
方差是在概率论和统计方差衡量一组数据时离散程度的度量数值的描述,对所有类型的非均匀性都可以用方差来描述。方差越大,图像就越不均匀。
DSNU和PRNU的数值表述就是基于方差的,下面给出计算公式。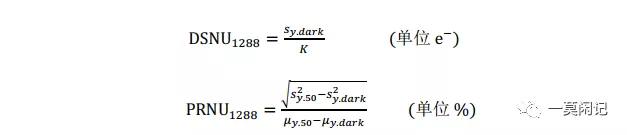
其中: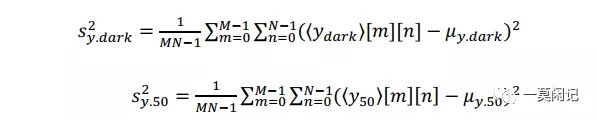
符号说明:
<y.dark>是对传感器阵列全部像元作平均化处理,L 幅分辨率为 M×N 的系列暗场图像各像元平均得到的图像;
<y.50>是对传感器阵列全部像元作平均化处理,L 幅分辨率为 M×N 的系列50%饱和图像各像元平均得到的图像;
u_y.dark和u_y.50是平均值;
s2_y.dark和s2_y.50是空域方差。
2.3.2 图谱法
仅基于方差计算与描述还不够全面,方差只是全局测量。方差还不能够描述我们的一些视觉感知。比如对于一张灰度渐进图像,或者固定条纹的图像,仅仅通过方差这个数值,我们是无法知道图像中是否有固定条纹,渐进变化等等。因此还需要借助图谱法进行观察。
一般情况下,不能认为空域不一致性是正态分布的,除非这种变化是随机的,即这些变化之间不存在空间相关性。
为此,空间非均匀性的描述必须考虑以下几种效应:
a) 渐进变化
制造的缺陷会引起整个芯片的渐进式的低频变化。这种效应不容易测量,因为这要求对整个芯片进行均匀辐照,这个很难做到。幸运地是这一效应并不会显著降低图像质量,人眼根本看不到影响。另外,镜头遮挡和不一致照明都会导致缓变。对于那些要求整个传感器阵列响应平坦的应用,必须对整个成像系统的渐进变化进行校正。
b)周期性变化
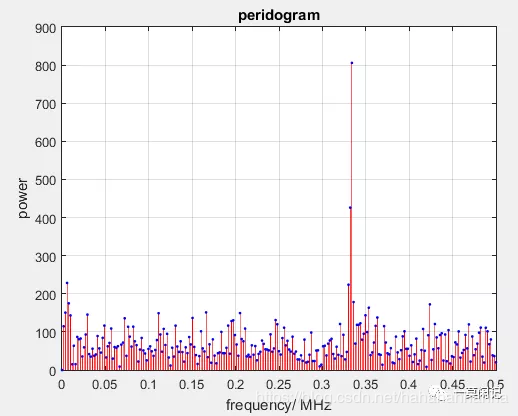
这种类型的失真由相机内部电子器件干扰引起,属于非常糟糕的情况,由于人眼对这种失真特别敏感。同样,它对很多图像处理也会产生干扰。因此,检出这种空域变化就显得尤为重要。
谱图(如:空域变化功率谱)的计算可以非常容易的实现对周期性变化的检测。在谱图中,周期性的变化在特定空间频率(单位:cycles/pixel)处,呈现尖锐的峰值。
根据采样频率和像素间隔的对应关系,就可以知道是周期是间隔几个像素了。
c) 异常值
这点和下面第3条说到的“缺陷像元”有重叠,这里不阐述。
d) 随机变化
如果非均匀性是完全随机的,即没有空间相关性,那么,功率谱应该是平坦的。
从上述描述来看,谱图是个好工具。利用傅里叶变换,可以分析出图像的灰度变化是随机还是周期性变化,如果是周期变化,可以计算处周期(像素隔离)是多少。
其实有一种效率很高的土锤办法,就是把图像放大,对比度拉大,数一数几个像素间隔的。
2.3.3 缺陷像元
由于应用不同,不能给出一个通用的缺陷像素定义。更合适的方法是采用直方图对像元特征的统计信息进行描述。然后在根据不同应用的判定标准,再认定哪些像元是有缺陷的。
两种直方图统计方法
a)对数直方图
重点介绍。相比普通的直方图,对数直方图是个神器。
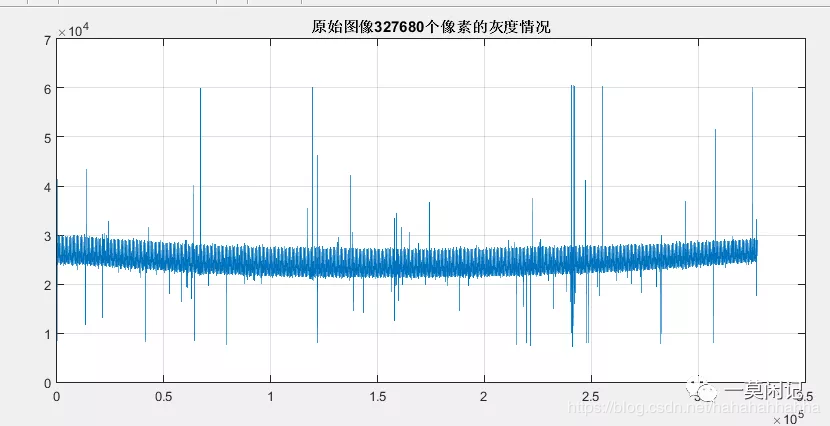
采用普通直方图统计,缺陷像素如下红框表示。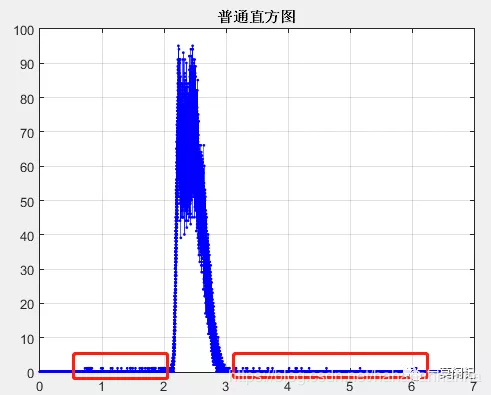
采用对数直方图统计,缺陷像素非常明显。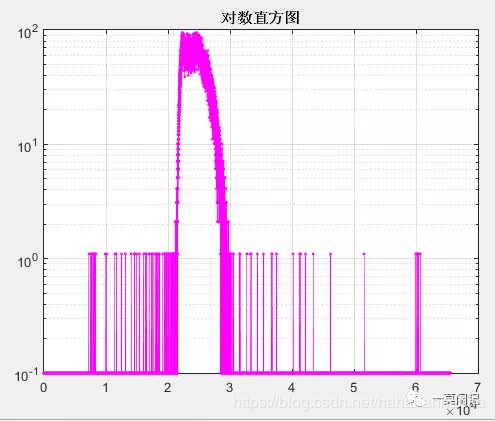
首先,具有正态分布的测量直方图,这种直方图在对数坐标图中表现为倒向抛物线,因此很容易从正态分布中识别出偏离像元。
第二,使用对数坐标,即使在数百万像元中也能够很容易地发现少数的几个缺陷像元。
一般很难预测偏离模型多远会影响最终的应用。因为,有的应用是通过人眼观察,而有的则是利用一系列算法处理图像;对于一些像元性能不佳的图片,在人眼观察的应用中可以正常使用,但一些算法却难以容忍。还有些应用需要无缺陷图像,而有些会容忍一定的缺陷,但当性能有偏差的像元数量过大时一些应用也会出现问题。
所有的这些信息都可以从对数直方图中读出。
b)累积直方图
不怎么使用,不做阐述。
3. 总结与理解
1)EMVA1288标准关于非均匀性描述比较完备。
EMVA1288是基于实验室标定的,它能够使得模型理想化、参数数值化、外界变量可控,方便将实际问题进行数学模型化,并通过计算,使得结果以数值和图形两种方式描述。多说一句,数和形一直就是数学描述的两个重要手段和研究对象,代数和几何。
数值是DSNU PRNU;图形是谱图和直方图。
2)EMVA1288标准和GB/T 17444是有联系的。
EMVA1288标准中采集暗场和明场两张图像。在《红外焦平面阵列参数测试方法》(GB/T 17444)中对于中波和长波也是采集两个均匀场图像,T0=293K下的图像,类似1288中的暗场,T=308K的图像,类似1288中的明场。
再者,EMVA1288中的DSNU&PRNU和GB/T 17444的盲元判断依据也有一定联系。
可见,EMVA1288确实是高屋建瓴,概括性,纲领性很强的标准。
3)小技巧
恼人的图像周期性变化,人眼对其非常敏感。采用傅里叶变换谱图分析,可以精确分析图像周期频率。
普通直方图可以显示整个像元的灰度值分布情况,“滥竽充数”的缺陷像素混迹其中,可以显示但是并不那么突出。采用对数直方图,能够彻底揪出缺陷像素,使其必显无疑。
4)非均匀性,记住123就够了,1个概念,2个基本表现形态,3个描述方式。
参考文献
《EMVA1288图像传感器和相机性能测试标准-3.1RC-2016》
20191217
图像处理基础知识:EMVA1288标准之“非均匀性”的理解的更多相关文章
- Matlab图像处理基础知识
Matlab图像处理基础知识 Matlab的图片以矩阵的形式存储,矩阵的行列值为图片的行列的色彩值. 1图像表达方式: 像素索引 图像被视为离散单元.如使用I(2,2)可以获取第二行第二列的像素值 空 ...
- IM开发基础知识补课(五):通俗易懂,正确理解并用好MQ消息队列
1.引言 消息是互联网信息的一种表现形式,是人利用计算机进行信息传递的有效载体,比如即时通讯网坛友最熟悉的即时通讯消息就是其具体的表现形式之一. 消息从发送者到接收者的典型传递方式有两种: 1)一种我 ...
- 深入理解python(一)python语法总结:基础知识和对python中对象的理解
用python也用了两年了,趁这次疫情想好好整理下. 大概想法是先对python一些知识点进行总结,之后就是根据python内核源码来对python的实现方式进行学习,不会阅读整个源码,,,但是应该会 ...
- C#基础知识之静态和非静态
项目中静态和非静态常被用到,什么时候需要用静态的,什么时候需要使用非静态,以及他们的区别是什么? 一.概述 静态和非静态的不同地方,就是静态从程序一启动就会一直占用内存,而非静态只有在实例化的时候才会 ...
- 视频图像处理基础知识5(RGB与Ycbcr相互转换公式 )【转】
转自:http://blog.csdn.net/Times_poem/article/details/51471438 版权声明:本文为博主原创文章,未经博主允许不得转载. 需求说明:视频处理算法基本 ...
- Nginx基础知识之————多模块(非覆盖安装、RTMP在线人数实例安装测试)
说明:已经安装好的nginx,需要添加一个未被编译安装的模块,需要怎么弄呢? 具体:这里以安装第三方nginx-rtmp-module和nginx-accesskey-2.0.3模块为例,nginx的 ...
- 【推荐】Nginx基础知识之————多模块(非覆盖安装、RTMP在线人数实例安装测试)
说明:已经安装好的nginx,需要添加一个未被编译安装的模块,需要怎么弄呢? 具体:这里以安装第三方nginx-rtmp-module和nginx-accesskey-2.0.3模块为例,nginx的 ...
- 基础知识《十二》一篇文章理解Cookie和Session
理解Cookie和Session机制 会话(Session)跟踪是Web程序中常用的技术,用来跟踪用户的整个会话.常用的会话跟踪技术是Cookie与Session.Cookie通过在客户端记录信息确定 ...
- Java基础知识强化103:Java常量池理解与总结
一.相关概念 1. 什么是常量 用final修饰的成员变量表示常量,值一旦给定就无法改变! final修饰的变量有三种:静态变量.实例变量和局部变量,分别表示三种类型的常量. 2. Class文件中的 ...
随机推荐
- H3C 根据子网掩码计算子网数
- WPF 元素裁剪 Clip 属性
本文介绍如何在 WPF 使用 Clip 裁剪元素 在 WPF 的 UIElement 提供了 Clip 属性,这个属性默认是空,但是如果设置了这个属性就会对元素进行裁剪 这个属性是一个 Geometr ...
- tikz 常用命令总结
使用斜线填充区域,并绘制边界 \fill[pattern color=red, pattern=north west lines, opacity=0.4] (0,0) -- (0,1) -- (1, ...
- koa2--07.cookies的设置和使用
cookies本身在koa中即可直接设置和使用,不需要在安装中间件 //cookies的使用 const koa = require('koa'); var router = require('koa ...
- 牛客wannafly 挑战赛14 B 前缀查询(trie树上dfs序+线段树)
牛客wannafly 挑战赛14 B 前缀查询(trie树上dfs序+线段树) 链接:https://ac.nowcoder.com/acm/problem/15706 现在需要您来帮忙维护这个名册, ...
- JMM中的Happens-Before原则
在java内存模型中,happens-before应该理解为:前一个操作的结果,可以被后续的操作获取,即内存可见性. 为了解决多线程的内存可见性问题,就提出了happens-before原则, ...
- mybatis 的 dao 接口跟 xml 文件里面的 sql 是如何建立关系的?一步步解析
序言 在开始正文之前,首先解释Dao接口和XML文件里的SQL是如何一一对应的? 一句话讲完就是:mybatis 会先解析这些xml 文件,通过 xml 文件里面的命名空间 (namespace)跟d ...
- 【题解】P1712 [NOI2016]区间(贪心+线段树)
[题解]P1712 [NOI2016]区间(贪心+线段树) 一个observe是,对于一个合法的方案,将其线段长度按照从大到小排序后,他极差的来源是第一个和最后一个.或者说,读入的线段按照长度分类后, ...
- $CH0601\ Genius\ ACM$ 倍增优化DP
ACWing Description 给定一个长度为N的数列A以及一个整数T.我们要把A分成若干段,使得每一段的'校验值'都不超过N.求最少需要分成几段. Sol 首先是校验值的求法: 要使得'每对数 ...
- JVM性能监测工具——VisualVM
Java本身自带了有好几个jvm监测工具,其中jconsole和jvisualvm这两个工具具有图形化界面,可以监测到cpu.类.线程.堆等一些参数,而且具有远程监控的能力. 启动:打开cmd命令窗口 ...