OpenCV——仿射变换
什么是仿射变换?
一个任意的仿射变换都能表示为 乘以一个矩阵 (线性变换) 接着再 加上一个向量 (平移).
综上所述, 我们能够用仿射变换来表示:
- 旋转 (线性变换)
- 平移 (向量加)
- 缩放操作 (线性变换)
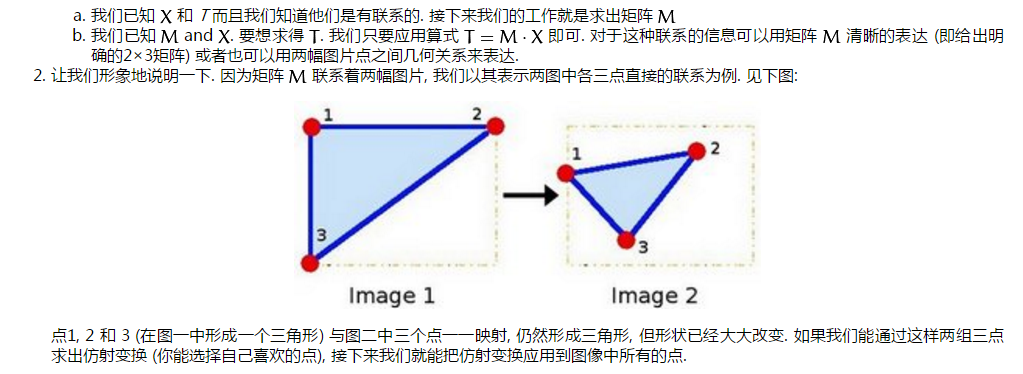
你现在可以知道, 事实上, 仿射变换代表的是两幅图之间的 关系 .
我们通常使用  矩阵来表示仿射变换.
矩阵来表示仿射变换.
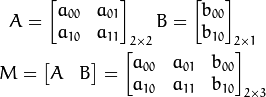
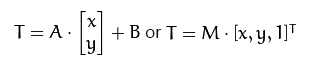
考虑到我们要使用矩阵  和
和  对二维向量
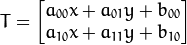
对二维向量  做变换, 所以也能表示为下列形式:
做变换, 所以也能表示为下列形式:
如何求怎样才能求得一个仿射变换?



实现代码:
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h> using namespace cv;
using namespace std; /// 全局变量
char* source_window = "Source image";
char* warp_window = "Warp";
char* warp_rotate_window = "Warp + Rotate"; /** @function main */
int main(int argc, char** argv)
{
Point2f srcTri[3];
Point2f dstTri[3]; Mat rot_mat(2, 3, CV_32FC1);
Mat warp_mat(2, 3, CV_32FC1);
Mat src, warp_dst, warp_rotate_dst; /// 加载源图像
src = imread("E:\\VS2015Opencv\\vs2015\\project\\picture\\03.jpg", 1); /// 设置目标图像的大小和类型与源图像一致
warp_dst = Mat::zeros(src.rows, src.cols, src.type()); /// 设置源图像和目标图像上的三组点以计算仿射变换
srcTri[0] = Point2f(0, 0);
srcTri[1] = Point2f(src.cols - 1, 0);
srcTri[2] = Point2f(0, src.rows - 1); dstTri[0] = Point2f(src.cols*0.0, src.rows*0.33);
dstTri[1] = Point2f(src.cols*0.85, src.rows*0.25);
dstTri[2] = Point2f(src.cols*0.15, src.rows*0.7); /// 求得仿射变换
warp_mat = getAffineTransform(srcTri, dstTri); /// 对源图像应用上面求得的仿射变换
warpAffine(src, warp_dst, warp_mat, warp_dst.size()); /** 对图像扭曲后再旋转 */ /// 计算绕图像中点顺时针旋转50度缩放因子为0.6的旋转矩阵
Point center = Point(warp_dst.cols / 2, warp_dst.rows / 2);
double angle = -50.0;
double scale = 0.6; /// 通过上面的旋转细节信息求得旋转矩阵
rot_mat = getRotationMatrix2D(center, angle, scale); /// 旋转已扭曲图像
warpAffine(warp_dst, warp_rotate_dst, rot_mat, warp_dst.size()); /// 显示结果
namedWindow(source_window, CV_WINDOW_AUTOSIZE);
imshow(source_window, src); namedWindow(warp_window, CV_WINDOW_AUTOSIZE);
imshow(warp_window, warp_dst); namedWindow(warp_rotate_window, CV_WINDOW_AUTOSIZE);
imshow(warp_rotate_window, warp_rotate_dst); /// 等待用户按任意按键退出程序
waitKey(0); return 0;
}
结果如下:

代码解析:
仿射变换: 正如上文所说, 我们需要源图像和目标图像上分别一一映射的三个点来定义仿射变换:
/// 设置源图像和目标图像上的三组点以计算仿射变换
srcTri[0] = Point2f(0, 0);
srcTri[1] = Point2f(src.cols - 1, 0);
srcTri[2] = Point2f(0, src.rows - 1); dstTri[0] = Point2f(src.cols*0.0, src.rows*0.33);
dstTri[1] = Point2f(src.cols*0.85, src.rows*0.25);
dstTri[2] = Point2f(src.cols*0.15, src.rows*0.7); /// 求得仿射变换
warp_mat = getAffineTransform(srcTri, dstTri);
我们获得了用以描述仿射变换的 矩阵 (在这里是 warp_mat)
将刚刚求得的仿射变换应用到源图像
warpAffine()函数有以下参数:
- src: 输入源图像
- warp_dst: 输出图像
- warp_mat: 仿射变换矩阵
- warp_dst.size(): 输出图像的尺寸
/// 对源图像应用上面求得的仿射变换
warpAffine(src, warp_dst, warp_mat, warp_dst.size());
旋转: 想要旋转一幅图像, 你需要两个参数:
- 旋转图像所要围绕的中心
- 旋转的角度. 在OpenCV中正角度是逆时针的
- 可选择: 缩放因子
我们通过下面的代码来定义这些参数:
再利用OpenCV函数 getRotationMatrix2D 来获得旋转矩阵, 这个函数返回一个 矩阵 (这里是 rot_mat)
最后把旋转应用到仿射变换的输出.
/// 计算绕图像中点顺时针旋转50度缩放因子为0.6的旋转矩阵
Point center = Point(warp_dst.cols / , warp_dst.rows / );
double angle = -50.0;
double scale = 0.6; /// 通过上面的旋转细节信息求得旋转矩阵
rot_mat = getRotationMatrix2D(center, angle, scale); /// 旋转已扭曲图像
warpAffine(warp_dst, warp_rotate_dst, rot_mat, warp_dst.size());
OpenCV——仿射变换的更多相关文章
- 【OpenCV新手教程之十八】OpenCV仿射变换 & SURF特征点描写叙述合辑
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/33320997 作者:毛星云(浅墨) ...
- OpenCV仿射变换+投射变换+单应性矩阵
本来想用单应性求解小规模运动的物体的位移,但是后来发现即使是很微小的位移也会带来超级大的误差甚至错误求解,看起来这个方法各种行不通,还是要匹配知道深度了以后才能从三维仿射变换来入手了,纠结~ esti ...
- opencv 仿射变换 投射变换, 单应性矩阵
仿射 estimateRigidTransform():计算多个二维点对或者图像之间的最优仿射变换矩阵 (2行x3列),H可以是部分自由度,比如各向一致的切变. getAffineTransform( ...
- opencv 仿射变换
import cv2 as cv import numpy as np img = cv.imread('../images/face.jpg') h, w = img.shape[:2] mat_s ...
- 系列文章 -- OpenCV入门教程
<OpenCV3编程入门>内容简介&勘误&配套源代码下载 [OpenCV入门教程之十八]OpenCV仿射变换 & SURF特征点描述合辑 [OpenCV入门教程之 ...
- 目标检测之harr---角点检测harr 的opencv实现
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接: http://blog.csdn.net/poem_qianmo/article/details/29356187 作者:毛星云(浅墨) ...
- 【转】【opencv】仿射变换
仿射变换 目标 在这个教程中你将学习到如何: 使用OpenCV函数 warpAffine 来实现一些简单的重映射. 使用OpenCV函数 getRotationMatrix2D 来获得一个 旋转矩阵 ...
- opencv 用户文档 错误更正 仿射变换
今天在看opencv官方给出的仿射变换计算仿射变换矩阵的文档的时候,发现官方文档中有个很明显的错误,再次给大家提个醒. 官方文档连接: http://opencv.willowgarage.com/d ...
- opencv 图像仿射变换 计算仿射变换后对应特征点的新坐标 图像旋转、缩放、平移
常常需要最图像进行仿射变换,仿射变换后,我们可能需要将原来图像中的特征点坐标进行重新计算,获得原来图像中例如眼睛瞳孔坐标的新的位置,用于在新得到图像中继续利用瞳孔位置坐标. 仿射变换在:http:// ...
随机推荐
- WebApp开发-Zepto
zepto.js自己去官网下载哈. DOM操作 $(document).ready(function(){ var $cr = $("<div class='cr'>插入的div ...
- html点击圆形扩散显示界面特效
开场白 效果 用到的核心代码 思考 探索 源码 兼容性问题 开场白 经常看到某些app有点击扩散的特效,有些当做扩散显示界面,有些扩散改变主题颜色,想在网页上实现一下,所以就有了这个. 效果 不想听逼 ...
- ng-项目结构
ng启动过程 目录结构 . ├── e2e 端到端测试(暂且不关心) ├── node_modules npm安装的第三方包 ├── src 存放业务源码 ├── .angular-cli.json ...
- LeetCode 13、罗马数字转整数
罗马数字包含以下七种字符: I, V, X, L,C,D 和 M. 字符 数值I 1V 5X 10L 50C 100D 500M 1000例如, 罗马数字 2 写做 II ,即为两个并列的 1.12 ...
- Beego的参数配置
参数配置 beego 目前支持 INI.XML.JSON.YAML 格式的配置文件解析,但是默认采用了 INI 格式解析,用户可以通过简单的配置就可以获得很大的灵活性.默认配置解析 beego 默认会 ...
- elasticsearch index 过程
(1)index request 到某一个Node(选择node的方式是采用round-robin)方法,此node 称为coordinate node,继续当前index request应该执行在哪 ...
- Web APIs---2. DOM(1)
1 DOM简介 1.1 定义 DOM就是文档对象模型,是W3C组织推荐的处理可扩展标记语言(HTML或者XML)的标准编程接口.W3C已经定义了一系列的DOM接口,通过这些DOM接口可以改变网页的内容 ...
- linux学习之编译-链接
在Windows下使用习惯了IDE,导致我们对程序的编译链接没有一个清晰的认识,甚至混淆了编辑器和编译器的概念.在学习Linux时,这些问题就暴露出来了. 实际上,我们应该严格区分一个程序从产生到执行 ...
- 其他 - PotPlayer - 基础快捷键总结
概述 尝试使用 potplayer 的快捷键 背景 最近需要反复看录像 回看 慢速 其他各种 没错, 我的需求就是 游戏复盘... 环境 os win10.1903 player potplayer. ...
- Oracle忘记用户名和密码
Microsoft Windows [版本 10.0.16299.192](c) 2017 Microsoft Corporation.保留所有权利. C:\WINDOWS\system32>e ...