ROS-导航功能-Gazebo
前言:仿真的整体思路,先启动仿真环境,再启动导航功能。
前提:已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
一、启动仿真环境
cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launch roslaunch mrobot_laser_nav_gazebo.launch
二、启动导航功能
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch roslaunch fake_nav_cloister_demo.launch
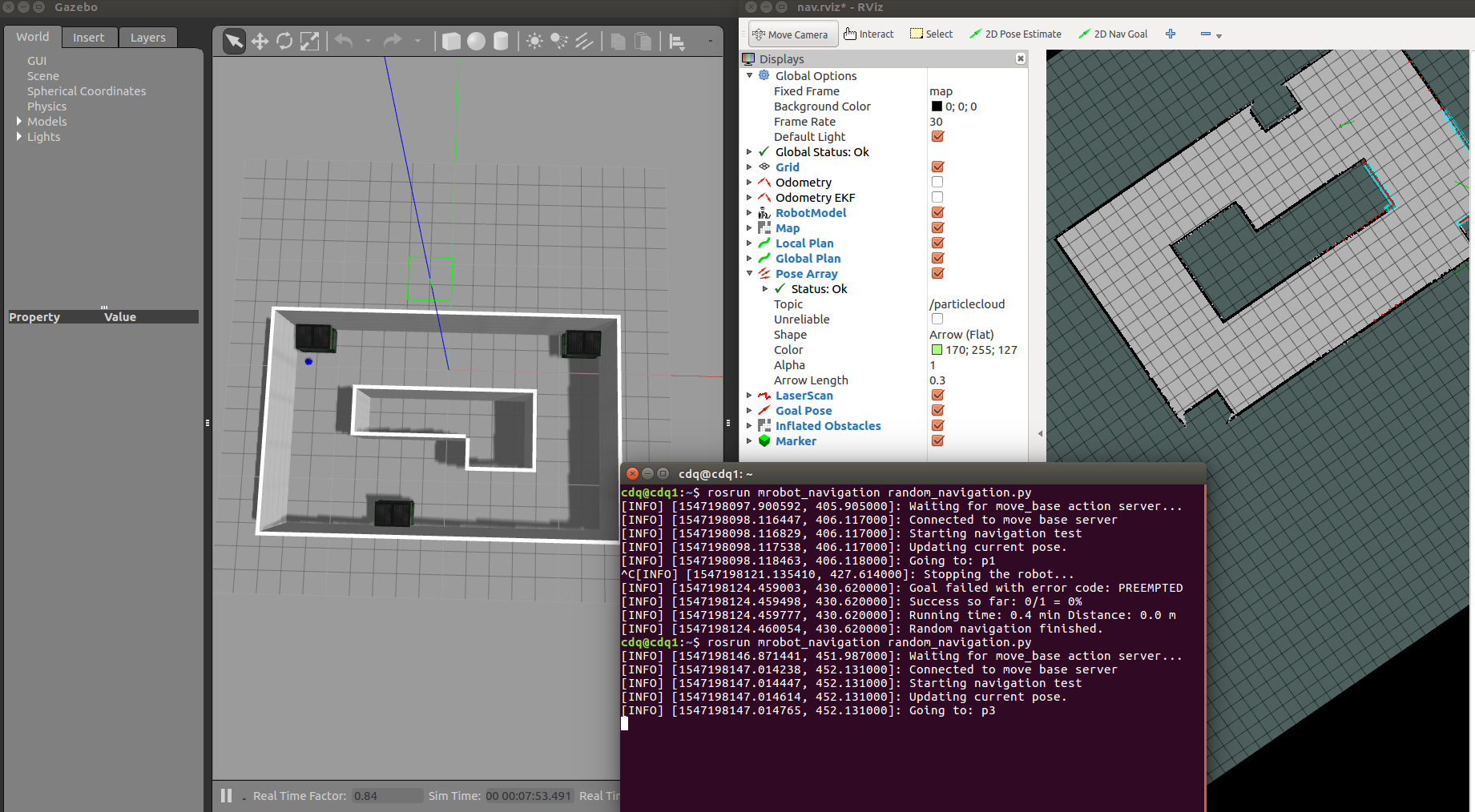
三、启动自主导航
rosrun mrobot_navigation random_navigation.py
-------------------------------------------
效果如下:
我们也可以在机器人路径上动态加入一些模型,来测试机器人的导航功能。
-END-
ROS-导航功能-Gazebo的更多相关文章
- ROS_Kinetic_x 基於ROS和Gazebo的RoboCup中型組仿真系統(多機器人協作)
國防科學技術大學發布了RoboCup中型組仿真平臺,基於ROS和Gazebo設計. 該平臺可以用於多機器人協作研究.參考資料如下: ROS新聞:1 http://www.ros.org/news ...
- ROS和Gazebo进行机器人仿真(一)
Gazebo是一种多机器人仿真器,可用于室内外机器人仿真.Gazebo在ROS中有良好的接口,包含ROS和Gazebo的所有控制. 若要实现ROS到Gazebo的通信,我们必须安装ROS-Gazebo ...
- Ubuntu ROS Arduino Gazebo学习镜像iso说明(indigo版)
ROS机器人程序设计(原书第2版)学习镜像分享及使用说明 新版已经发布,请参考: http://blog.csdn.net/zhangrelay/article/details/53324759 Ub ...
- ROS下gazebo打开出现问题
通常情况下,在装完ros后,打开gazebo, 会出现无法连接服务器获取模型的情况.这样,我们打开gazebo, 终端会提示timeout,gazebo界面没有网格. 这是因为服务器网站地址好像已经换 ...
- ROS和Gazebo进行机器人仿真(二)
一.在Gazebo中使用ROS控制器 在本节中,我们将讨论如何在Gazebo中让机器人的每个关节运动. 为了让关节动起来,我们需要分配一个ROS控制器,尤其是,我们需要为每个关节连上一个与transm ...
- ROS示例----导航功能包Husky_exploration
ROS导航功能包示例husky amcl gmapping slam exploration 此功能包包含如下文件: 结构如下: $ tree -L 2 . ├── CMakeLists.txt -& ...
- Making my own Autonomous Robot in ROS / Gazebo, Day 1: Building the static model
Day 1: Setting up ROS: Indigo OS: Ubuntu 14.04 OS: Gazebo 7.0.0 Initialize the workspace To create t ...
- ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse
ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse 书中,大部分出现hydro的地方,直接替换为indigo或ja ...
- Gazebo機器人仿真學習探索筆記(七)连接ROS
中文稍后补充,先上官方原版教程.ROS Kinetic 搭配 Gazebo 7 附件----官方教程 Tutorial: ROS integration overview As of Gazebo 1 ...
- Gazebo與ROS版本說明
使用哪种ROS / Gazebo版本的组合 介绍 本文档提供了有关将不同版本的ROS与不同版本的Gazebo结合使用的选项的概述.建议在安装Gazebo ROS包装之前阅读它.重要!简单的分析,快速和 ...
随机推荐
- Java中面向对象三大特性之——多态
多态的概述: 多态是继封装.继承之后,面向对象的第三大特性. 生活中,比如跑的动作,小猫.小狗和大象,跑起来是不一样的.再比如飞的动作,昆虫.鸟类和飞机,飞起来也是不一样的.可见,同一行为,通过不同 ...
- Josephus problem(约瑟夫问题,丢手绢问题)
约瑟夫问题 约瑟夫环问题是一个数学应用题:已知n个人(以编号1,2,3.....,n)围坐在一张圆桌的周围.从编号为k的人开始报数,数到m的那个人出列:他的下一个人又从1开始报数,数到m的那个人又出列 ...
- DP——最长上升子序列(LIS)
DP——最长上升子序列(LIS) 基本定义: 一个序列中最长的单调递增的子序列,字符子序列指的是字符串中不一定连续但先后顺序一致的n个字符,即可以去掉字符串中的部分字符,但不可改变其前后顺序. LIS ...
- MySQL5.7本地首次登录win10报错修改
1.打开MySQL目录下的my.ini文件,在文件的最后添加一行“skip-grant-tables”,保存并关闭文件.(Win10默认安装,my.ini在C:\ProgramData\MySQL\M ...
- python最好用的IDE及查看源码的方法
一.PyCharm 很多语言都有比较流行的开发工具,比如JAVA 的Eclipse, C#,C++的VisualStudio,最好的Python 开发IDE就是PyCharm 可以直接调试代码,试运行 ...
- NLTK学习笔记(七):文本信息提取
目录 实体识别:分块技术 分块语法的构建 树状图 IOB标记 开发和评估分块器 命名实体识别和信息提取 如何构建一个系统,用于从非结构化的文本中提取结构化的信息和数据?哪些方法使用这类行为?哪些语料库 ...
- grafana简介
grafana一般是和一些时间序列数据库进行配合来展示数据的,例如:Graphite.OpenTSDB.InfluxDB等 grafana是用于可视化大型测量数据的开源程序,他提供了强大和优雅的方式去 ...
- [bzoj2743][HEOI2012]采花_树状数组
采花 bzoj-2743 HEOI-2012 题目大意:给定n朵花,每朵花有一个种类,m次询问:一段区间中至少出现两朵花的种类的个数. 注释:$1\le n,m\le10^6$. 想法:这个题超级像H ...
- SpringBoot多数据源改造(一)
今天做一个需求,业务项目需要访问另一个项目的数据库. 常用两种方案: 1.另一个项目提供一个RestFul API,供调用方通过feign或其它httpClient等方式来访问. 2.项目中通过配置多 ...
- [转]十五天精通WCF——第六天 你必须要了解的3种通信模式
wcf已经说到第六天了,居然还没有说到这玩意有几种通信模式,惭愧惭愧,不过很简单啦,单向,请求-响应,双工模式,其中的第二种“请求-响应“ 模式,这个大家不用动脑子都清楚,这一篇我大概来分析下. 一: ...