3D图形学常用公式
本篇内容来自于书籍《3D图形学基础:图形与游戏开发》,个人总结
1.数学背景与历史
笛卡尔数学由著名的法国哲学家、物理学家、生物学家、数学家"勒奈·笛卡尔"发明。
1.1 1D数学
1.1.1 名词解释
- 整数:
1,2,3,4,50,-70 - 自然数:
非负整数,1,2,5,100。 - 有理数:
一个整数除以另一个整数,可以除尽,结果为,1/2、3/4/、0.88。 - 无理数:
有些数无法用有理数表示,如圆周长与直径的比值,记作π(pai)。小数点后有无穷的数,除不尽的数。 - 实数:
有理数 + 无理数的范围,有理数可数,无理数不可数。 - 离散数学:
研究自然数和整数的领域。 - 连续数学:
研究实数的领域。
1.2 2D数学
1.2.1 简单介绍
- 二维可以理解为矩形的网格。
- 高中时我们用的一般坐标系:横轴左-x,横轴右+x,纵轴上+y,纵轴下-y
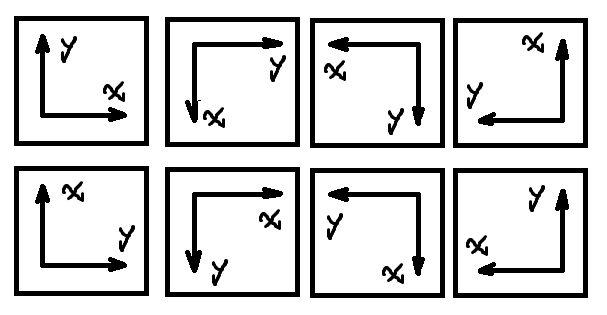
- 普通的坐标系,通过旋转变换,镜像变换,可以演化出8种坐标系,它们之间都是等价的。
1.3 3D数学:
1.3.1 2种三维坐标系
左手坐标系
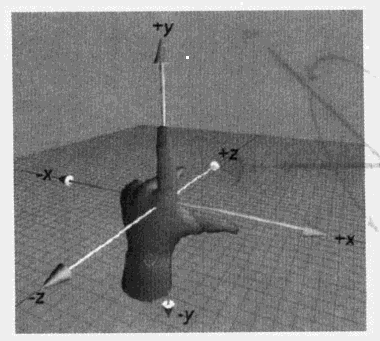
左手坐标系:拇指指向+x,食指指向+y,中指指向+z(远离自己的方向)右手坐标系

右手坐标系:拇指指向+x,食指指向+y,中指指向+z(远离自己的方向)- 左手坐标系经过旋转变化有24种,右手一样也有24种,总共有48种坐标系
“左手坐标系” 与 “右手坐标系”不是等价的。
下文都用一般的左手坐标系
2.多坐标系统
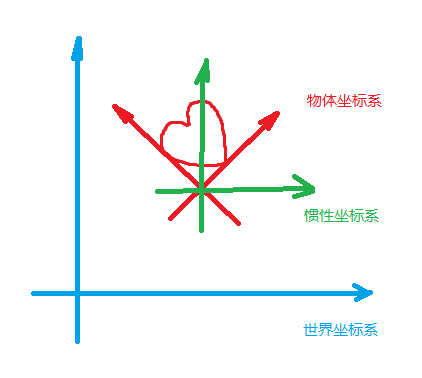
- 世界坐标系
- 物体坐标系
- 惯性坐标系
- 摄像机坐标系
3.向量
3.1 简单概念
向量:
“速度”和“位移”是向量,有大小有方向的量叫向量,向量描述位移。标量:
“速率”和“长度”是标量,没有方向,向量的绝对值,标量描述数量。
3.2 向量的2种写法
一般用小写字母表示一个向量,比如 v。
行向量:
\(v=[2,3]\) (2D)
\(v=[5,-5,7]\) (3D)
\(v=[1,4,8,7]\) (4D)可以省略逗号
\[v=\begin{bmatrix} 2&3 \end{bmatrix}\]列向量:
\[v=\begin{bmatrix} 2\\3 \end{bmatrix}\]
注意:这2种写法没有优劣之分,一般情况下用“行向量”,因为书写方便
3.3 2D、3D、4D向量下标字母表示
2D:
\(v=[v_{x},v_{y}]\)
3D:
\(v=[v_{x},v_{y},v_{z}]\)
4D:
\(v=[v_{x},v_{y},v_{z},v_{w}]\) (w是分量)
3.4 向量的几何意义
二维向量\(v=[2,3]\)可以理解为,在二维坐标系中,从原点开始,先向+x走2步,再向+y走3步到终点,连接原点与终点。
三维向量\(v=[2,4,5]\)可以理解为,在三维坐标系中,从原点开始,先向+x走2步,再向+y走4步,再向+z走5步,连接原点与终点。
向量相当于表示,位移的序列。
向量与点:
“点”描述位置,\((2,3)\)是“点”,
“向量”描述位移,\([2,3]\)是“向量”。
4.向量运算
4.1 零向量
可以理解为“没有位移”,标量零表示“没有数量”
4.2 向量变负
几何上可以理解为,向量的方向相反,2D,3D,4D坐标系的操作分别是
- \(-v=-[x,y]=[-x,-y]\)
- \(-v=-[x,y,z]=[-x,-y,-z]\)
- \(-v=-[x,y,z,w]=[-x,-y,-z,-w]\)
4.3 求模运算
求模运算,也就是求向量的大小,向量大小也称为“向量长度”,或“模”。比如有个向量 \(v\),向量标量的绝对值两边加单数线,就是向量长度,记作"\(\begin{Vmatrix}v\end{Vmatrix}\)"
公式:
\(\begin{Vmatrix}v\end{Vmatrix}=\sqrt{v_{x}^{2}+v_{y}^{2}}\) (2D)
\(\begin{Vmatrix}v\end{Vmatrix}=\sqrt{v_{x}^{2}+v_{y}^{2}+v_{z}^{2}}\) (3D)
几何意义:2D的坐标系中,可以用勾股定理解释;3D的证明很复杂,不讨论。
4.4 标量与向量的乘法(除法):
公式:
乘法
\(kv=k[v_{x},v_{y}]=[kv_{x},kv_{y}]\) (2D)
\(kv=k[v_{x},v_{y},v_{z}]=[kv_{x},kv_{y},kv_{z}]\) (3D)
除法
\[\frac{1}{k}=\frac{1}{k}[v_{x},v_{y}]=[\frac{1}{k}v_{x},\frac{1}{k}v_{y}]\]
\[\frac{1}{k}=\frac{1}{k}[v_{x},v_{y},v_{z}]=[\frac{1}{k}v_{x},\frac{1}{k}v_{y},\frac{1}{k}v_{z}]\]
4.5 标准化向量
标准化向量一般用向量名\(v\),加下标norm组成,记作“ \(v_{norm}\) ”,这个过程称为“标准化”。
公式:
\(v_{norm}=v/\begin{Vmatrix}v\end{Vmatrix}\)
举个例子:
\[v=[12,5]\\v_{norm} =\frac{[12,5]} {\begin{Vmatrix}[12,5]\end{Vmatrix}}\\=\frac{[12,5]}{\sqrt{12^2+5^2}} \\
=\frac{[12,5]}{13}\\
\approx[0.923,0.385]\]
几何意义:可以从上面的例子中看出,在2D中的标准化后的向量是一个从原点出发,模为1的向量。
4.6 向量加减法
向量\(a\)与向量\(b\)相加时,可以理解为,A的终点接到B的起点,接着从A的起点指向B的终点就是两向量相加的结果;向量\(a\)与向量\(b\)在相减时,可以理解为,B的终点指向A的终点的向量就是两向量相减的结果。
(图)
公式:
\(a+b=[a_{x},a_{y}]+[b_{x},b_{y}]=[a_{x}+b_{x},a_{y}+b_{y}]\) (2D)
\(a-b=[a_{x},a_{y}]-[b_{x},b_{y}]=[a_{x}-b_{x},a_{y}-b_{y}]\) (2D)
\(a+b=[a_{x},a_{y},a_{z}]+[b_{x},b_{y},b_{z}]=[a_{x}+b_{x},a_{y}+b_{y},a_{z}+b_{z}]\) (3D)
\(a-b=[a_{x},a_{y},a_{z}]-[b_{x},b_{y},b_{z}]=[a_{x}-b_{x},a_{y}-b_{y},a_{z}-b_{z}]\) (3D)
注意:
- 向量加法满足交换律,向量减法不满足交换律
永远有\(a+b=b+a\)
但\(a-b=-(b-a)\)仅当\(a=b\)时,\(a-b=b-a\)
4.7 两点间距离公式
公式:
\(距离(a,b)=\sqrt{(b_{x}-a_{x})^2+(b_{y}-a_{y})^2}\) (2D)
\(距离(a,b)=\sqrt{(b_{x}-a_{x})^2+(b_{y}-a_{y})^2+(b_{z}-a_{z})^2}\) (3D)
4.8 向量点乘
也称作“内积”,结果在几何中表示2个向量的“相似”程度,\(a\)点乘\(b\),记作“ \(a·b\) ”,点不能省略,结果是其夹角的cos值,若结果>0,则夹角\(0<=\theta<90\);若结果=0,则夹角\(\theta\)=90;若结果<0,则夹角\(\theta\)>90
公式1:
\(a·b = a_{x}b_{x} + a_{y}b_{y}\) (2D)
\(a·b = a_{x}b_{x} + a_{y}b_{y}+a_{z}b_{z}\) (2D)
公式2:
\(a·b = ||a|| \quad ||b||\quad \cos { (\theta )}\)
有用的推导:用点乘计算2个向量的夹角
\[\theta = \arccos{( \frac{a·b}{\begin{Vmatrix}a\end{Vmatrix}\begin{Vmatrix}b\end{Vmatrix}})}\]
4.9 向量投影
求向量\(v\)在向量\(n\)上的投影,能将\(v\)分解为两个分量:\(v_{\bot}\)和\(v_{\vert\vert}\)。他们分别垂直于和平行于\(n\),并满足\(v=v_{\bot}+v_{\vert\vert}\)。一般称平行分量\(v_{\vert\vert}\)为\(v\)在\(n\)上的投影。
\[v_{平行}=v_{\vert\vert}= n\frac{v·n}{\begin{Vmatrix}n\end{Vmatrix}^2}\]
\[v_{垂直}=v_{\bot}= \begin{Vmatrix}v\end{Vmatrix}-n\frac{v·n}{\begin{Vmatrix}n\end{Vmatrix}^2}\]
4.10 向量叉乘
又称作“叉积”,叉乘的结果是一个向量,该向量垂直于2个叉乘向量组成的平面
公式1:
\(a=[a_{x},a_{y},a_{z}]\)
\(b=[b_{x},b_{y},b_{z}]\)
\(a\times b=[(a_{y}b_{z}-a_{z}b_{y}),(a_{z}b_{x}-a_{x}b_{z}),(a_{x}b_{y}-a_{y}b_{x})]\)
向量叉乘后向量的长度,为2向量的夹角θsin值与2向量长度的积,这个长度也是a和b向量组成平行四边形的面积
公式2:
\(\begin{Vmatrix}a\times b\end{Vmatrix} = \begin{Vmatrix}a\end{Vmatrix}\begin{Vmatrix}b\end{Vmatrix}\sin{(\theta)}\)
- 叉乘结果向量的方向
在左手坐标系中,若叉乘的两向量收尾相接后是顺时针,则指向你;若叉乘的两向量收尾相接后是逆时针,则远离你;右手坐标系则相反
5.Vector3类型
关于这个类型的实现,每一种语言都有不同的实现方式,从书中看到的结果是,定义了Vector3类有自己的构造方法,并且对常用的运算符进行重载,加了一些常用方法。
我相信,在unity中的Vector3也有相应的操作,比如点乘操作用方法来表现,而不是去重载“*”算符。
这个类基本上游戏引擎都会实现。
3D图形学常用公式的更多相关文章
- 3D游戏常用技巧Normal Mapping (法线贴图)原理解析——高级篇
1.概述 上一篇博客,3D游戏常用技巧Normal Mapping (法线贴图)原理解析——基础篇,讲了法线贴图的基本概念和使用方法.而法线贴图和一般的纹理贴图一样,都需要进行压缩,也需要生成mipm ...
- WebGL 入门-WebGL简介与3D图形学
什么是WebGL? WebGL是一项使用JavaScript实现3D绘图的技术,浏览器无需插件支持,Web开发者就能借助系统显卡(GPU)进行编写代码从而呈现3D场景和对象. WebGL基于OpenG ...
- 新书《Cocos2dx 3.x 3D图形学渲染技术讲解》问世
笔者介绍:姜雪伟,IT公司技术合伙人,IT高级讲师,CSDN社区专家,特邀编辑,畅销书作者,已出版书籍:<手把手教你架构3D游戏引擎>电子工业出版社和<Unity3D实战核心技术详解 ...
- OpenCV 学习笔记(9)RGB转换成灰度图像的一个常用公式Gray = R*0.299 + G*0.587 + B*0.114
https://blog.csdn.net/fly_wt/article/details/86432886 RGB转换成灰度图像的一个常用公式是:Gray = R*0.299 + G*0.587 + ...
- 3D图形学理论入门指南
转:http://gad.qq.com/article/detail/35096 介绍 当我还小的时候,我曾以为计算机图形学是最酷的玩意儿.但是随即我认识到,学习图形学——创建那些超级 ...
- Excel常用公式
转载请注明来源"ExcelHome"并保留原文链接.固定链接:http://www.excelhome.net/lesson/article/excel/1897.html 1.I ...
- 3d的 一些公式
1. 3d围绕 z轴旋转 x,y 变换公式: // α β x = r cosα y = r sinα x' = r cos (α+β) y' = r sin (α+β) x' = r (cosα c ...
- Unity 3d 脚本常用事件
1.学习笔记,每天晚上看看unity 3d 的教程 学点东西,先上一张图 这是 系统中脚本执行的顺序图 Awake()在MonoBehavior创建后就立刻调用,在脚本实例的整个生命周期中,Awake ...
- AS3动画效果常用公式
缓动公式: sprite.x += (targetX – sprite.x) * easing;//easing为缓动系数变量 sprite.y += (targetY – sprite.y) * e ...
随机推荐
- React Native使用AsyncStorage本地持久化
AsyncStorage AsyncStorage是一个简单的,未加密的,异步的,持久化,关键值存储系统,是全局的.类似于iOS中的NSUserDefault. 存值: import { AppReg ...
- JavaScript 运行时错误: 无法获取未定义或 null 一种解决方案
脚本是肯定没有错误的!! 引用了高版本的jquery jquery-1.10.1.min.js 但在ie10下面就是报错 "JavaScript 运行时错误: 无法获取未定义或 null & ...
- webpack脚手架搭建(简单版)
运行命令 安装依赖:npm install 运行项目:npm start 大致流程 npm init:新建 package.json 将需要的依赖模块加入 dependencies(生产环境) 和 d ...
- Tuple方法
组元是C# 4.0引入的一个新特性,编写的时候需要基于.NET Framework 4.0或者更高版本.组元使用泛型来简化一个类的定义. public class Point { public int ...
- sql语句与 数据库
create table wyx( xh int primary key, xm varchar(20) not null, nl int, zcrq timestamp default curr ...
- JS判断是否来自手机移动端的访问,并跳转
var browserName_ = navigator.userAgent ; &&browserName_.indexOf(&&browserName_.index ...
- timer--计时器
<!DOCTYPE html> <html> <head> <meta charset="utf-8" /> <title&g ...
- linux项目-之系统安装部署-cobbler
http://cobbler.github.io/manuals/2.6.0/1/1_-_Release_Notes.html http://www.osyunwei.com/archives/760 ...
- weave
Docker的原生网络支持非常有限,且没有跨主机的集群网络方案.目前实现Docker网络的开源方案有Weave.Kubernetes.Flannel.Pipework以及SocketPlane等,其中 ...
- win7下IIS错误:"无法访问请求的页面,因为该页的相关配置数据无效"的解决方法(转)
今天新装win7,然后在IIS下布署了一个网站,布署完成后运行,提示如下错误:HTTP 错误 500.19 - Internal Server Error无法访问请求的页面,因为该页的相关配置数据无效 ...