基于FPGA的图像镜像
图像镜像,一种较为常见的图像处理操作,分为水平镜像、垂直镜像、对角镜像。水平镜像即处理后的图像与原图像关于垂直线对称,垂直镜像为处理后的图像与
原图像关于水平线对称,对角镜像则关于对角线对称。
关于低分辨率的图像,直接使用BRAM缓存,然后按照对称的关系取出即可,而高分辨率的图像则需要要到DDR缓存。本文主要讲述1080P分辨率的图像镜像,选用
DDR3缓存,使用的仍然是XILINX K7开发板。
起初,我是将图像先缓存至DDR中,然后再按照对应的位置关系取出。后来发现实现对角镜像时逻辑极为复杂,便放弃该方案。后来根据对角镜像可以由水平镜像和
垂直镜像组合而来,将图像镜像分为两部分:水平镜像、垂直镜像,结构如图1所示。其中,水平镜像使用BRAM实现,垂直镜像使用DDR3实现。
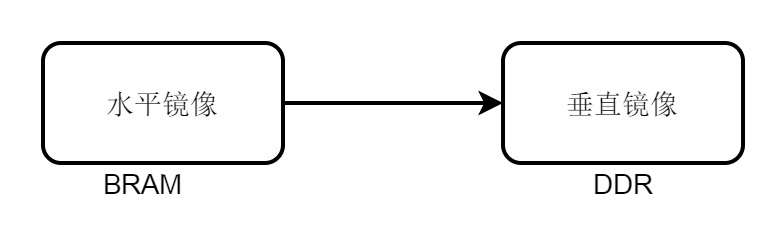
图1 图像镜像结构
水平镜像,即图像行的位置调转,行首变成行末,行末变成行尾。在FPGA中可选用两个bram乒乓操作,也可选择一个真双口BRAM同时读写,实现
思路一致,即:先写入一行有效图像数据,然后开启读,根据是否水平镜像读取已经存入的一行数据,如果需要水平镜像则逆序读bram,否则顺序读。关键
代码如下所示:
if(neg_vid_data_valid_image)begin//一行有效数据写完
state_bram_ctrl<=BRAM_WR_RD;//读写同时进行
bram0_addra<=bram0_part2_addr;
line_length<=bram0_addra;
bram0_eab<=1'b1;
bram0_addrb<=bram_reverse_flag? (bram0_addra+'d1):'d0;//1-1920为有效数据段
bram_init_done<=1'b1;
end
垂直镜像,即原图像列的位置翻转,列首变成列尾,列尾变成列首。对于高分辨的图像只能选用DDR缓存,即在图像已经缓存至DDR一帧的基础上开启读操作,行内顺序,列内逆序读。
而对角镜像,则是水平镜像和垂直镜像的组合,所以需同时开启水平镜像以及垂直镜像使能,通过两个部分的处理以得到最终结果。最后实现的效果如下图所示:
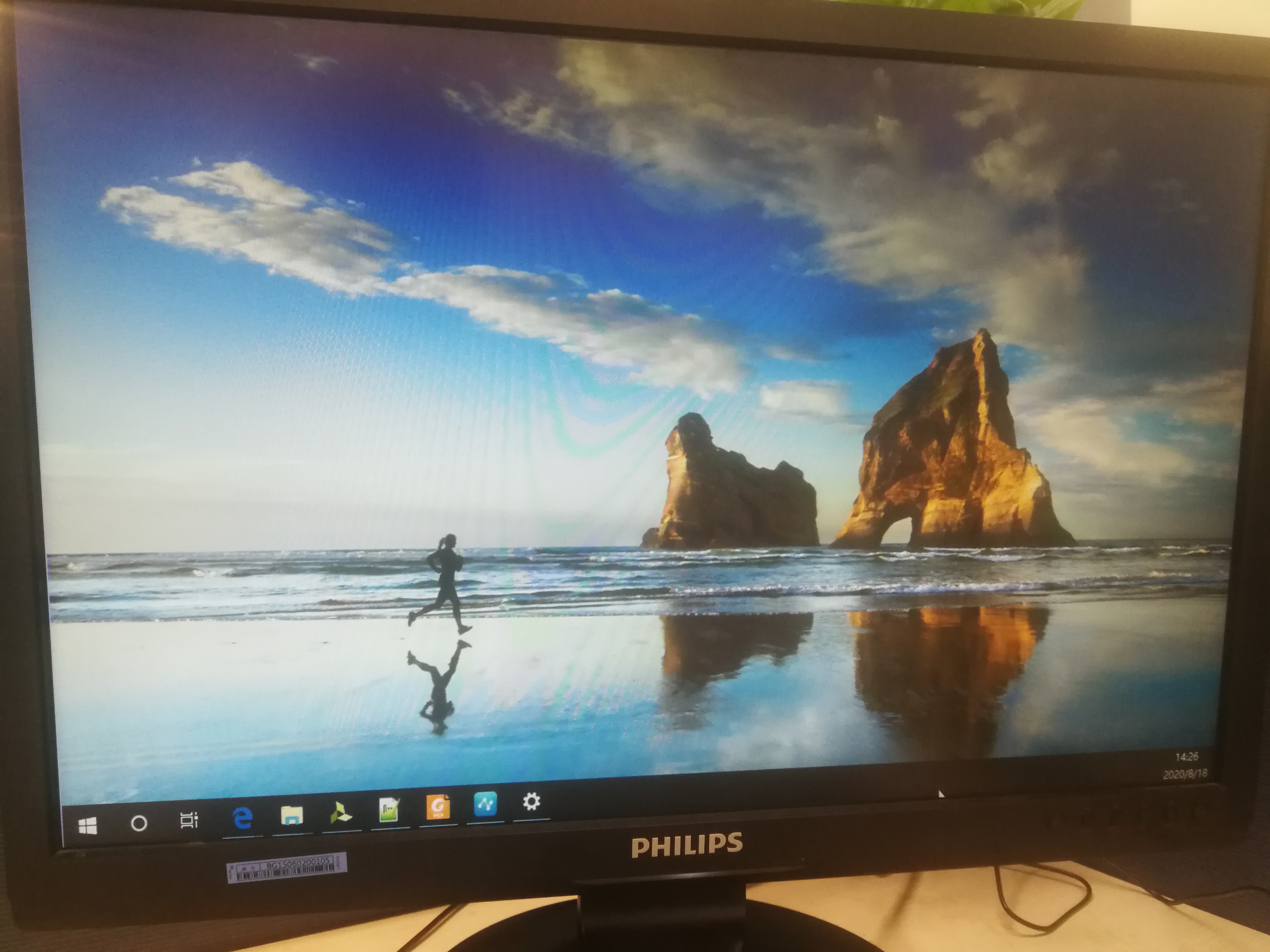
图2 原图像
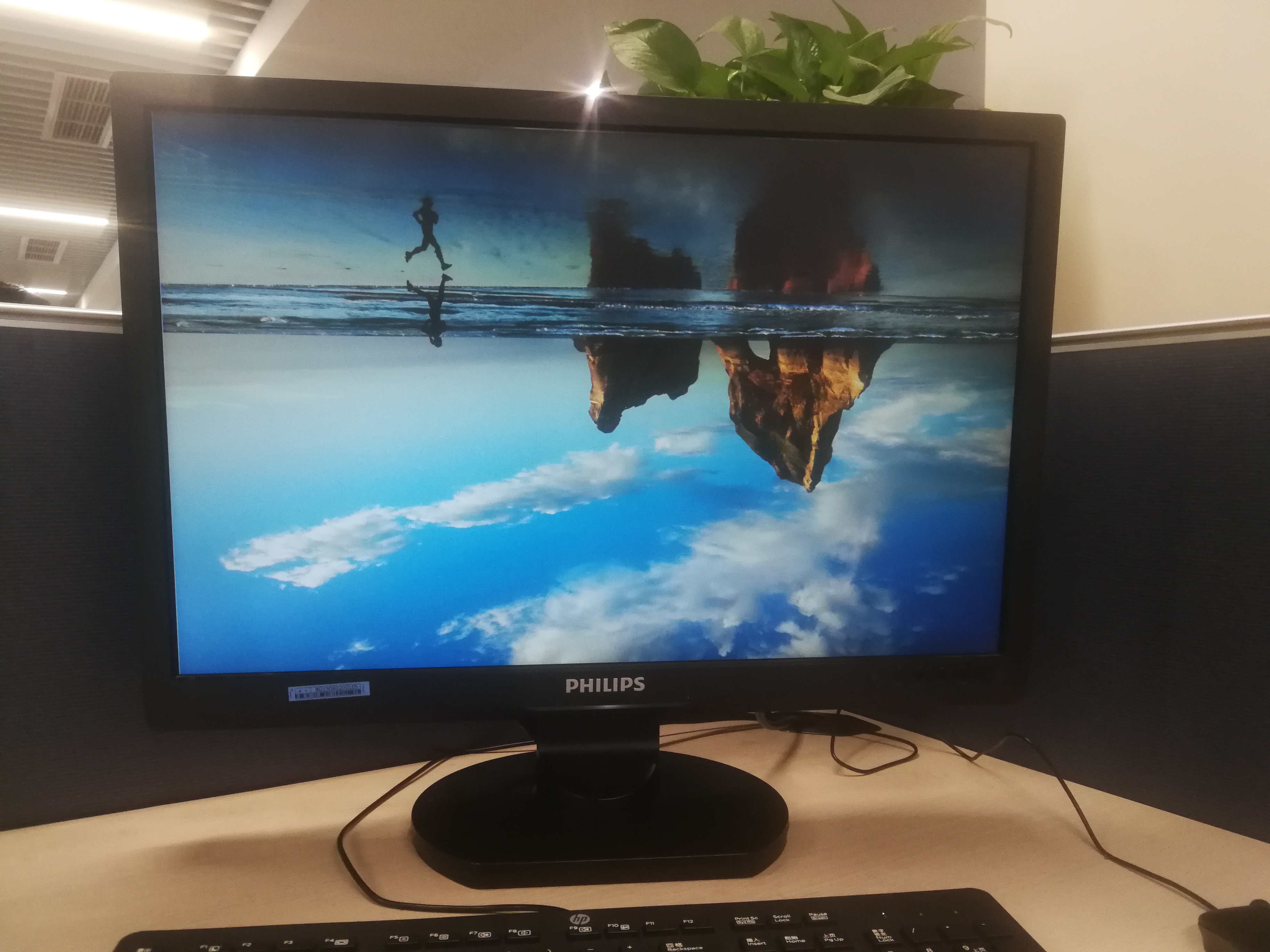
图3 垂直镜像
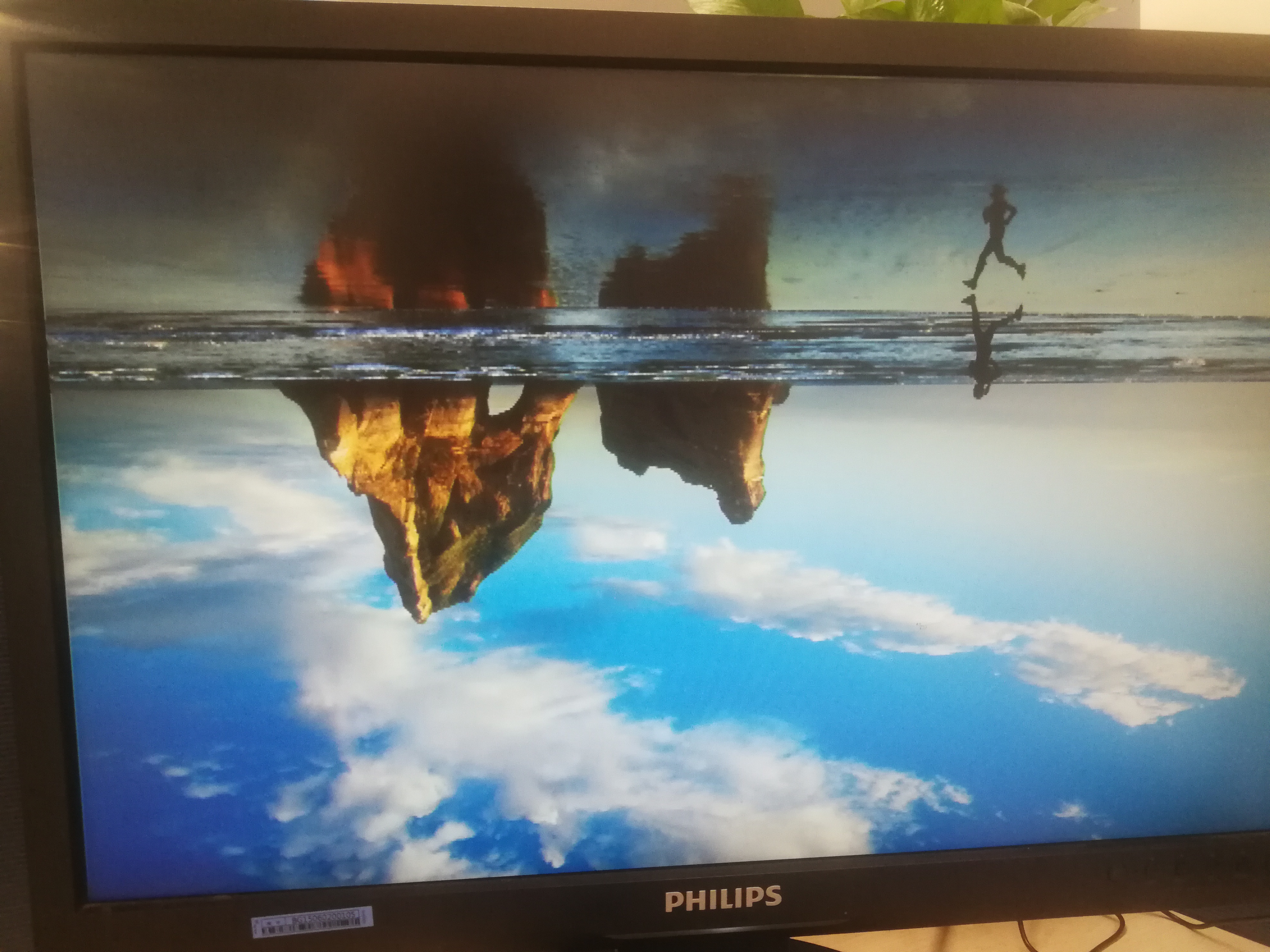
图4 对角镜像
图5 水平镜像
基于FPGA的图像镜像的更多相关文章
- 基于FPGA的图像开发平台 其他摄像头附件说明(OV5642 OV9655)
基于FPGA的图像开发平台 其他摄像头附件说明 FPGA_VIP_V101 编者 奇迹再现 个人博客 http://www.cnblogs.com/ccjt/ 联系邮箱 Shenyae86@163.c ...
- 基于 FPGA 的图像边缘检测
本文主要内容是实现图像的边缘检测功能 目录 mif文件的制作 调用 ip 核生成rom以及在 questasim 仿真注意问题 灰度处理 均值滤波:重点是3*3 像素阵列的生成 sobel边缘检测 图 ...
- 基于FPGA的图像去噪
目录 结构图 其中FPGA 控制模块为核心,通过它实现视频图像数据的获取.缓存.处理和控制各模块间通讯[1].由CCD 相机对目标成像,高速图像数据由camera link 实时传输[2],经信号转换 ...
- 基于FPGA的线阵CCD图像测量系统研究——笔记
本文是对基于FPGA的线阵CCD图像测量系统研究(作者:高尚)的阅读笔记 第一章绪论 1. 读读看 读了前面的摘要依然没有看懂作者要做什么.接着往下读....终于看到了一个字眼“基于机器视觉的图像测量 ...
- 基于FPGA的Uart接收图像数据至VGA显示
系统框图 前面我们设计了基于FPGA的静态图片显示,接下来我们来做做基于FPGA的动态图片显示,本实验内容为:由PC端上位机软件通过串口发送一幅图像数据至FPGA,FPGA内部将图像数据存储,最后扫描 ...
- 基于FPGA的线阵CCD实时图像采集系统
基于FPGA的线阵CCD实时图像采集系统 2015年微型机与应用第13期 作者:章金敏,张 菁,陈梦苇2016/2/8 20:52:00 关键词: 实时采集 电荷耦合器件 现场可编程逻辑器件 信号处理 ...
- 基于FPGA的RGB图像转灰度图像算法实现
一.前言 最近学习牟新刚编著<基于FPGA的数字图像处理原理及应用>的第六章直方图操作,由于需要将捕获的图像转换为灰度图像,因此在之前代码的基础上加入了RGB图像转灰度图像的算法实现. 2 ...
- 基于FPGA的OLED真彩色动态图像显示的实现
源:基于FPGA的OLED真彩色动态图像显示的实现 作为第3代显示器,有机电致发光器件(Organic Light Emitting Diode,OLED)由于其主动发光.响应快.高亮度.全视角.直流 ...
- 基于FPGA的均值滤波算法的实现
前面实现了基于FPGA的彩色图像转灰度处理,减小了图像的体积,但是其中还是存在许多噪声,会影响图像的边缘检测,所以这一篇就要消除这些噪声,基于灰度图像进行图像的滤波处理,为图像的边缘检测做好夯实基础. ...
随机推荐
- toFixed奇葩问题
1.浮点数运算后的精度问题 在计算商品价格加减乘除时,偶尔会出现精度问题 // 加法 ===================== 0.1 + 0.2 = 0.30000000000000004 0.7 ...
- camera数字降噪(DNR)
camera数字降噪(DNR) 闭路电视摄像机 无论多么出色和弱光,在黑暗中拍摄视频监控录像时都会不可避免地产生一些噪音.噪声是任何电子通信中不可避免的部分,无论是视频还是音频.本质上是静态的–视频信 ...
- TensorFlowMNIST数据集逻辑回归处理
TensorFlow逻辑回归处理MNIST数据集 本节基于回归学习对 MNIST 数据集进行处理,但将添加一些 TensorBoard 总结以便更好地理解 MNIST 数据集. MNIST由https ...
- NX二次开发-获取面的外围边和孔槽边
函数: UF_MODL_ask_face_loops() 获取面的所有封闭边组合(多组edge) UF_MODL_ask_loop_list_count() 获取loop的数量(面上孔.槽的数量+1 ...
- 【NX二次开发】获得屏幕矩阵并设置WCS为屏幕方向
说明:获得屏幕矩阵并设置WCS为屏幕方向(Z朝向自己,X轴朝右,Y轴超上). 方法: 1 extern DllExport void ufusr(char *param, int *retcode, ...
- 【linux】驱动-15-定时器
目录 前言 15. 定时器 15.1 内核函数汇总 15.2 内核滴答 15.3 相关结构体 15.4 setup_timer() 设置定时器 15.5 add_timer() 向内核添加定时器 15 ...
- top命令信息详解
top详解 [root@localhost ~]# top top - 09:36:38 up 17:59, 3 users, load average: 0.00, 0.03, 0.00 Tasks ...
- VueJs(16)---Nuxt引入mavon-editor插件实现markdown功能
Vue引入mavon-editor插件实现markdown功能 说明 mavon-editor是一款基于Vue的markdown编辑器,因为当前项目是采用Nuxt,所以这里所展示的教程是针对Nuxt引 ...
- 第三方API对接如何设计接口认证?
一.前言 在与第三方系统做接口对接时,往往需要考虑接口的安全性问题,本文主要分享几个常见的系统之间做接口对接时的认证方案. 二.认证方案 例如订单下单后通过 延时任务 对接 物流系统 这种 异步 的场 ...
- Redisson 分布式锁源码 02:看门狗
前言 说起 Redisson,比较耳熟能详的就是这个看门狗(Watchdog)机制. 本文就一起看看加锁成功之后的看门狗(Watchdog)是如何实现的? 加锁成功 在前一篇文章中介绍了可重入锁加锁的 ...