loto示波器实践——超声波测距模块
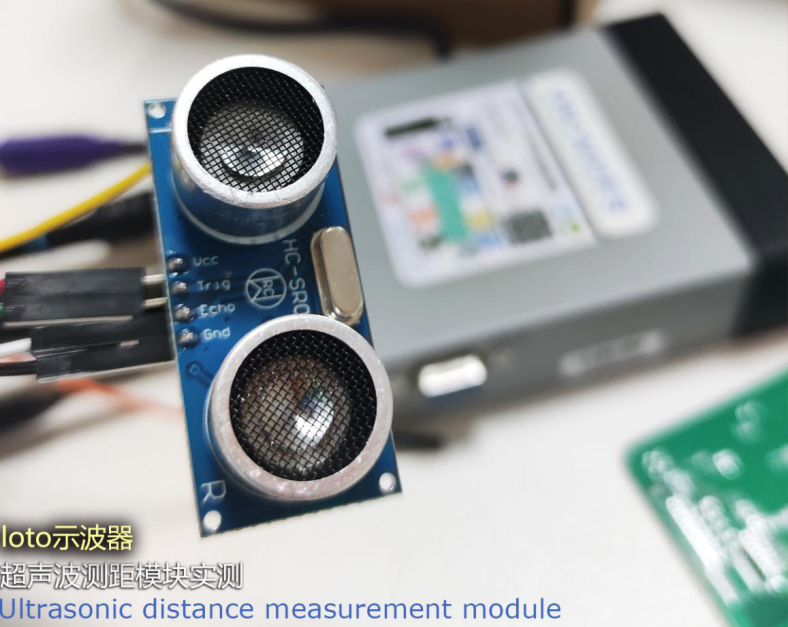
我们这里用到的超声波测距模块,一般是用于arduino智能小车自动避障的。经常见到的应用是使用单片机或者stm32和这种模块结合进行开发的。
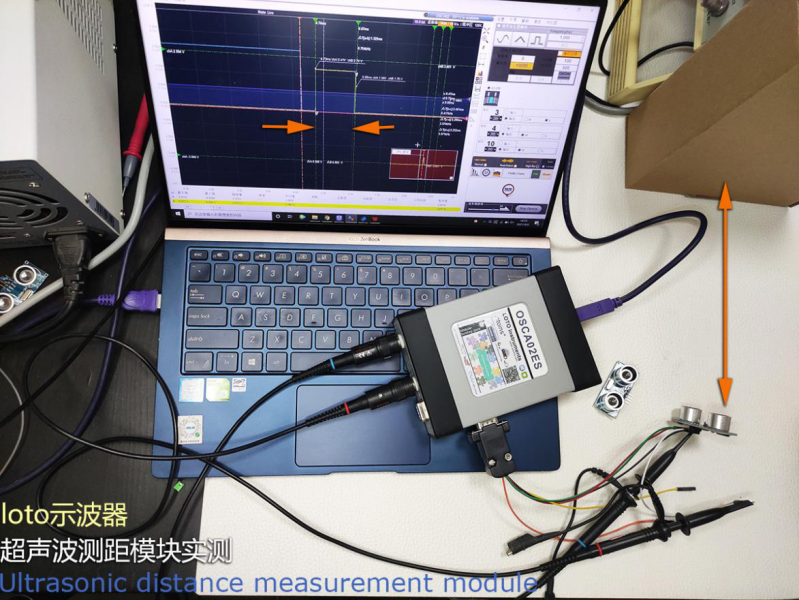
我们使用LOTO示波器可以更直观和快速的看到超声波测量距离模块的工作波形和结果。使用LOTO示波器测量超声波距离测量模块,可以直接省去了单片机编程环节,让测试更快速和直观。
对于LOTO示波器而言,如果你手里的是带有DE2扩展接口的型号,就直接把线缆接在DE2上,如果是只有DE1接口的型号,就把线缆接在DE1上。目前而言,带有DE2接口的型号是肯定支持这个模块的,只有DE1接口型号中,OSC482系列是肯定可以的。

这根线缆很简单,是根据LOTO的扩展口的定义把电源和iO引脚引出来制作的。
这个超声波距离测量传感器只需要很少几根线,一根3.3V/5v的电源,一根地线,一根IO线作为触发就可以了。还有一个输出引脚是距离输出,我们直接用示波器探头接就可以了。

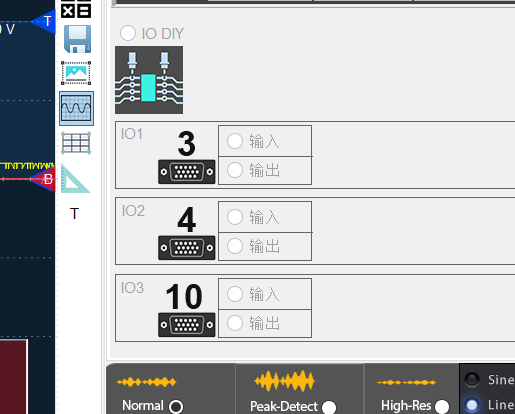
loto示波器定义的DE-15扩展口上 14引脚是5V,15引脚是GND。DE-15有3个可以被上位机软件控制的GPIO,我们使用其中的一个作为模块的触发输入即可。我们使用引脚3的IO2。

我们把示波器的两个通道,分别用探头接到模块的触发输入和它的距离测量输出,这样我们就能同时观察输入和输出的波形了。
超声波模块距离测量的原理很简单,只要在它的输入引脚发送一个低电平到高电平的跳变,持续10微秒以上,再跳变到底电平,模块就会被触发进行测量距离。
我们手动操作示波器的上位机软件来控制IO口的触发变化,那么它的高电平持续时间是远远大于10微秒的,所以是可行的。
模块的输入被触发了以后,它的内部会做一系列的操作,这个我们就不用管了,我们只要等待它的距离输出结果就可以了。
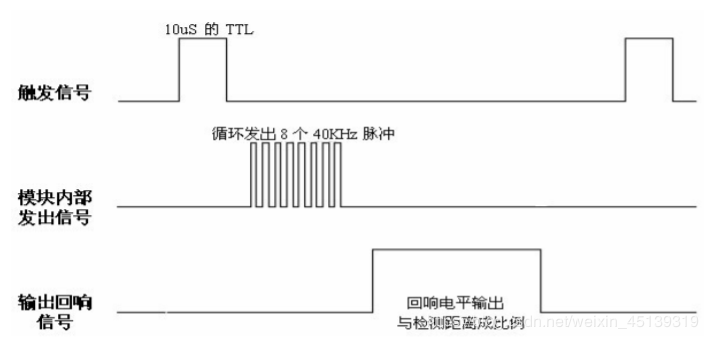
测量完成模块的输出引脚会出现一个高电平,高电平的宽度就代表着实际距离前方障碍物的距离。我们只需要捕捉这个高电平宽度,就可以利用转换公式将电平宽度转换成距离。
这种用LOTO示波器接超声波模块测量距离的方法,可以用在智能检测应用的二次开发中。
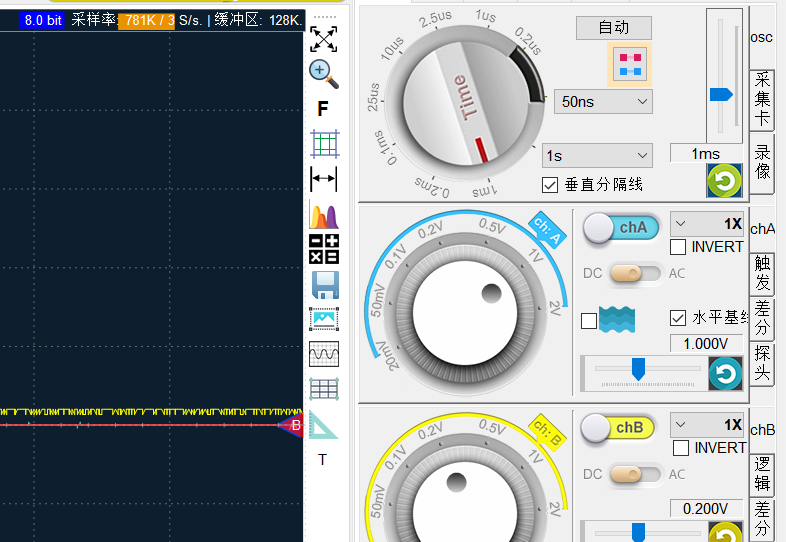
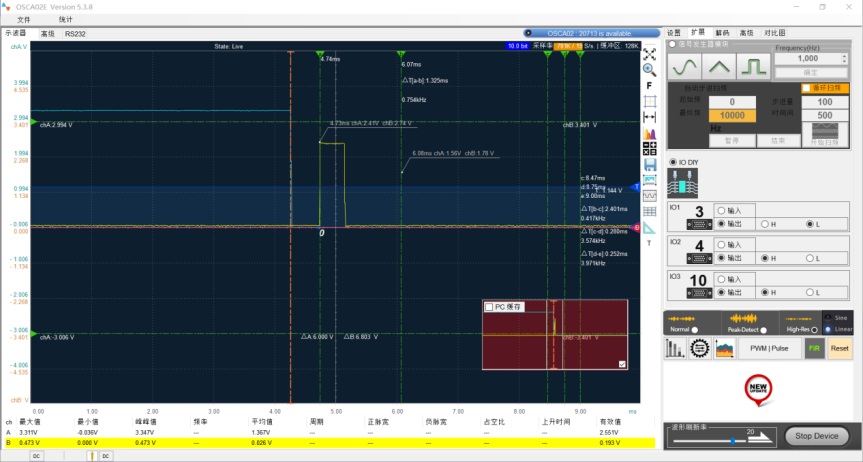
我们先随便设置一个时间档位,比如1毫秒,通道A我们接的是模块的输入信号,通道B接的是模块的输出信号。输入信号是我们手动控制的IO口,是一个3.3V逻辑的GPIO,所以通道A的档位我们选择1V/DIV就可以。因为我们给模块供电是5V的,所以模块的输出电平是5V的,我们可以使用探头的X10档,然后软件设置使用0.2V/DIV。两个通道都使用直流耦合。
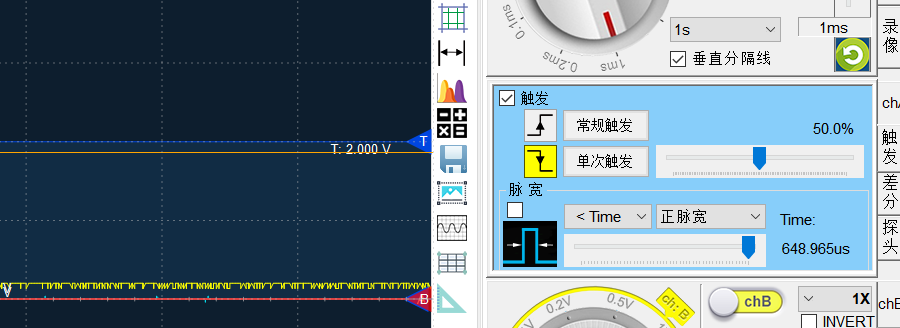
我们使用示波器的触发功能来捕获模块的触发输入。我们将触发电平设置在0~3.3V之间即可,用下降沿触发。
我们在软件的扩展标签页里设置IO口控制为IO输出,并且把IO2设置成低电平输出状态。这样就都设置完毕了,我们可以开是在IO2输出一个高电平触发信号了。
我们先输出高电平,然后输出低电平,来触发模块开始测量距离。
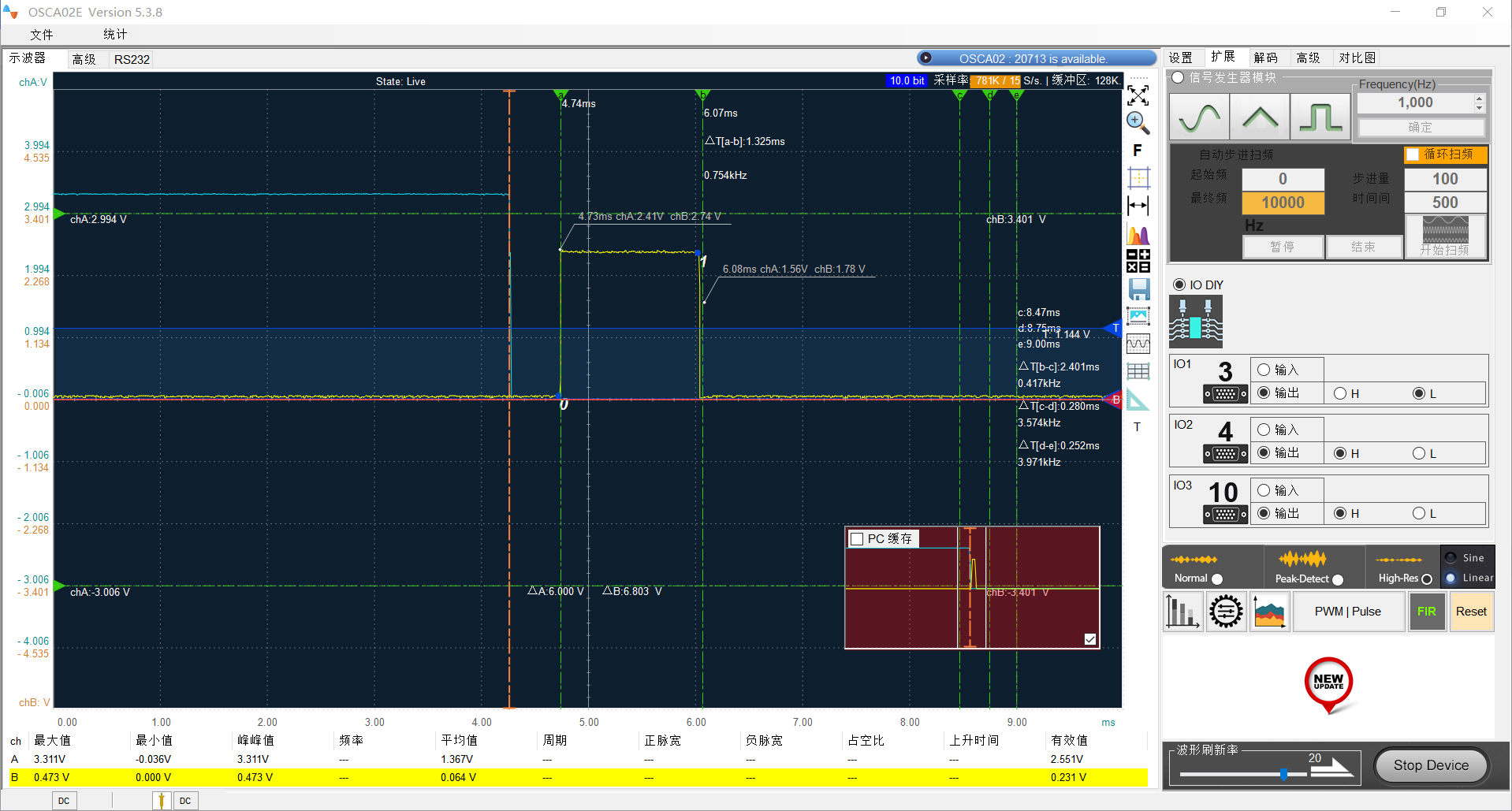
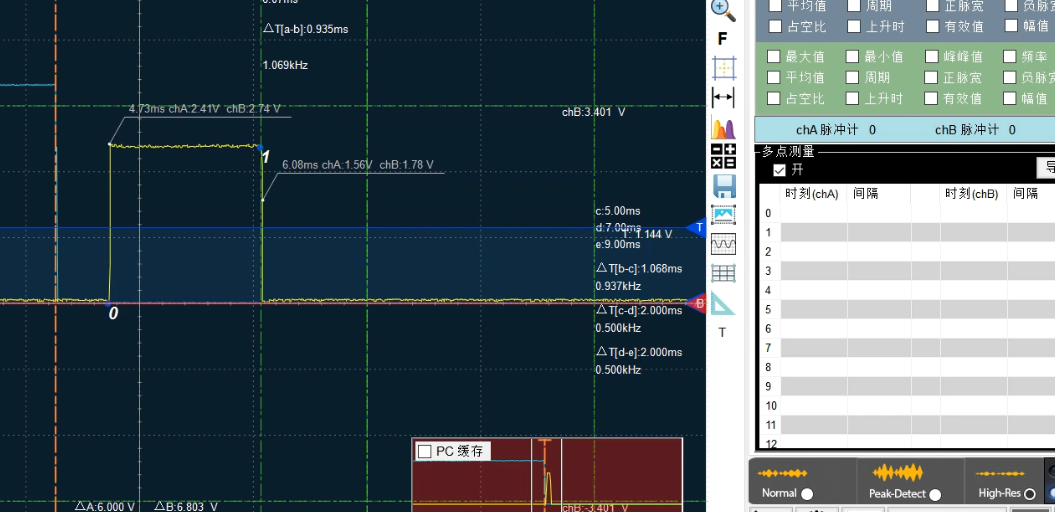
我们看到已经触发到了信号了,蓝色的是通道A的IO2触发信号,黄色的就是模块的距离输出电平信号。
黄色波形的高电平宽度就代表着被测量到的距离。
在LOTO示波器上有多种方式对这个时间宽度结果进行测量。我们可以拖动标尺测量,也可以用鼠标框选一个测量区域自动计算出时间跨度,也可以在波形的跳动边沿放置浮动光标显示时刻数值,也可以打开自动多点测量功能,让系统自动标记跳变边沿并直接自动显示跳变边沿之间的时间差值。
我们用挡板放在超声波模块前面不同的距离处,可以测到不同的高电平宽度的输出信号。
相关测试过程的演示视频可以参考:
B站: https://www.bilibili.com/video/BV1wp4y187jB
西瓜:https://www.ixigua.com/6947962707840598541
loto示波器实践——超声波测距模块的更多相关文章
- [自娱自乐] 3、超声波测距模块DIY笔记(三)
前言 上一节我们已经研究了超声波接收模块并自己设计了一个超声波接收模块,在此基础上又尝试用单片机加反相器构成生成40KHz的超声波发射电路,可是发现采用这种设计的发射电路存在严重的发射功率太低问题,对 ...
- [自娱自乐] 4、超声波测距模块DIY笔记(四)——终结篇·基于C#上位机软件开发
前言 上一节我们已经基本上把超声波硬件的发射和接收模块全部做好了,接下来我们着手开发一个软硬结合的基于C#的平面定位软件! 目录 一.整体思路 二.效果提前展示 2-1.软件部分展示 2-2.硬件部分 ...
- [自娱自乐] 2、超声波测距模块DIY笔记(二)
前言 上一节我们已经大致浏览下目前销售的超声波测距模块同时设计了自己的分析电路,这次由于我买的电子元件都到了,所以就动手实验了下!至写该笔记时已经设计出超声波接收模块和超声波发射模块,同时存在超声波发 ...
- STM32—驱动HC-SR04超声波测距模块
文章目录 超声波测距原理 HC-SR04工作原理 STM32实现驱动 1.引脚的配置 2.时序控制 3.时间差测量 4.如何将距离测出来 超声波测距原理 利用HC-SR04超声波测距模块可以实现比较精 ...
- 基于STM32F103ZET6 HC_SR04超声波测距模块
这是最后的实验现象,改变不同的角度即可测得距离 板子 PZ6806L 超声波模块 HC_SR04 HC_SR04模块讲解 通过该超声波模块说明书,可明白供电需VCC 5V 还需GND ECHO(回 ...
- 树莓派 HC-SRO4超声波测距模块的使用
先上个图 这个模块的针脚跟之前玩的那三个有所区别,除了VCC和GND两个针脚,还多了两个Trig和Echo针脚,分别是输出和输入,Trig我接的是20针脚,Echo是21 该模块的工作原理为,先向TR ...
- 张高兴的 Windows 10 IoT 开发笔记:HC-SR04 超声波测距模块
HC-SR04 采用 IO 触发测距.下面介绍一下其在 Windows 10 IoT Core 环境下的用法. 项目运行在 Raspberry Pi 2/3 上,使用 C# 进行编码. 1. 准备 H ...
- Arduino 控制超声波测距模块
一.实物图 二.例子代码 用到数字2 和3 引脚,还有两个就是vcc GND两个阴脚,用模块连线比较简单
- KS103超声波测距模块
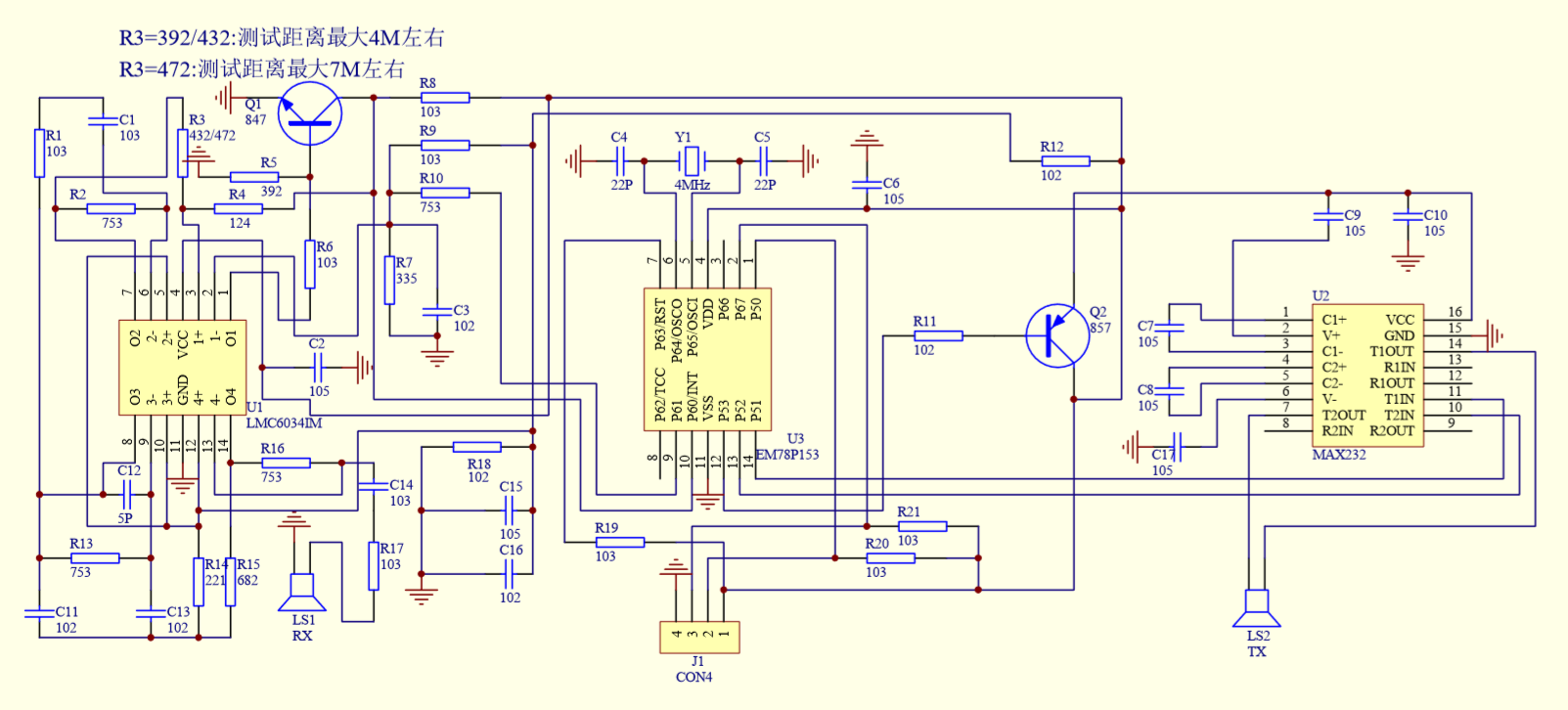
max232:电平转换芯片,将电脑的RS-232标准串口(高+12V,低-12V)转换为(高+5V,低0V). 电脑串口(RS -232) => 单片机串口(TTL串口) SIPEX SP323 ...
随机推荐
- 用SpringBoot实现策略模式
问题的提出 阅读别人代码的时候最讨厌遇到的就是大段大段的if-else分支语句,一般来说读到下面的时候就忘了上面在判断什么了.很多资料上都会讲到使用策略模式来改进这种代码逻辑. 策略模式的类图如下: ...
- amber模拟kcl水溶液
最近刚开始学习amber软件,看网上的教程勉强知道怎么操作这个amber了.就暂时跑了个分子动力学,其他的啥也没处理.先把我的操作过程记录下来吧,免得日后忘记. 一.构建kcl.pdb结构 利用Gau ...
- firewalld dbus接口使用指南
firewalld,一个基于动态区的iptables/nftables守护程序,自2009年左右开始开发,最新版本 - 防火墙0.6.3 - 发布于2018年10月11日.主要的开发人员是托马斯·沃纳 ...
- Blazor Webassembly多标签页开发
最近准备用Blazor Webassembly做后台开发要用到多标签页,找了半天发现绝大多数都是Blazor Server的多标签没有Webassembly.没办法只能自己想办法造轮子了. 查了许多资 ...
- 微信小程序_快速入门01
这段时间,嗯,大四课程已经结束了,工作也已经找到了,但是呢,到公司报道的时间还没到,哈哈,马上就开始人生的第一份工作了,怎么说确实有点期待~ 在这段时间一方面为第一份工作做各种准备,另一方面也没有停止 ...
- Mybatis 二级缓存应用 (21)
[MyBatis 二级缓存] 概述:一级缓存作用域为同一个SqlSession对象,而二级缓存用来解决一级缓存不能夸会话共享,作用范围是namespace级,可以被多个SqlSession共享(只要是 ...
- [转载]CSS3实现文本垂直排列
最近的一个项目中要使文字垂直排列,也就是运用了CSS的writing-mode属性. writing-mode最初时ie中支持的一个属性,后来在CSS3中增添了这一新的属性,所以在ie中和其他浏览器中 ...
- 自定义Push/Pop和Present/Dismiss转场
项目概述 iOS中最常见的动画无疑是Push和Pop的转场动画了,其次是Present和Dismiss的转场动画. 如果我们想自定义这些转场动画,苹果其实提供了相关的API,在自定义转场之前,我们需要 ...
- javascript-原生-结构
1.获取用户输入内容的方法 window.prompt("提示信息","默认值"); 获取用户输入内容(字符串类型),返回用户输入内容. 2.顺序结构:所有语句 ...
- [no_code]团队任务拆解Alpha
项目 内容 这个作业属于哪个课程 2020春季计算机学院软件工程(罗杰 任健) 这个作业的要求在哪里 团队任务拆解 我们在这个课程的目标是 远程协同工作,采用最新技术开发软件 这个作业在哪个具体方面帮 ...