Kruskal算法 - C语言详解
最小生成树
在含有n个顶点的连通图中选择n-1条边,构成一棵极小连通子图,并使该连通子图中n-1条边上权值之和达到最小,则称其为连通网的最小生成树。 
例如,对于如上图G4所示的连通网可以有多棵权值总和不相同的生成树。

克鲁斯卡尔算法介绍
克鲁斯卡尔(Kruskal)算法,是用来求加权连通图的最小生成树的算法。
基本思想:按照权值从小到大的顺序选择n-1条边,并保证这n-1条边不构成回路。
具体做法:首先构造一个只含n个顶点的森林,然后依权值从小到大从连通网中选择边加入到森林中,并使森林中不产生回路,直至森林变成一棵树为止。
克鲁斯卡尔算法图解
以上图G4为例,来对克鲁斯卡尔进行演示(假设,用数组R保存最小生成树结果)。

第1步:将边<E,F>加入R中。
边<E,F>的权值最小,因此将它加入到最小生成树结果R中。
第2步:将边<C,D>加入R中。
上一步操作之后,边<C,D>的权值最小,因此将它加入到最小生成树结果R中。
第3步:将边<D,E>加入R中。
上一步操作之后,边<D,E>的权值最小,因此将它加入到最小生成树结果R中。
第4步:将边<B,F>加入R中。
上一步操作之后,边<C,E>的权值最小,但<C,E>会和已有的边构成回路;因此,跳过边<C,E>。同理,跳过边<C,F>。将边<B,F>加入到最小生成树结果R中。
第5步:将边<E,G>加入R中。
上一步操作之后,边<E,G>的权值最小,因此将它加入到最小生成树结果R中。
第6步:将边<A,B>加入R中。
上一步操作之后,边<F,G>的权值最小,但<F,G>会和已有的边构成回路;因此,跳过边<F,G>。同理,跳过边<B,C>。将边<A,B>加入到最小生成树结果R中。
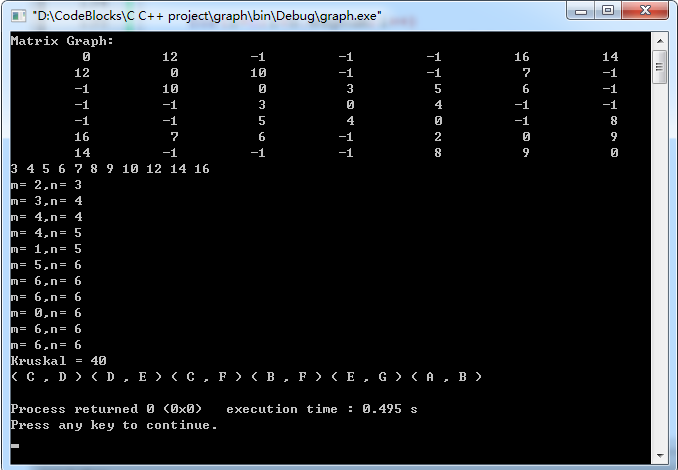
此时,最小生成树构造完成!它包括的边依次是:<E,F> <C,D> <D,E> <B,F> <E,G> <A,B>。
克鲁斯卡尔算法分析
根据前面介绍的克鲁斯卡尔算法的基本思想和做法,我们能够了解到,克鲁斯卡尔算法重点需要解决的以下两个问题:
问题一 对图的所有边按照权值大小进行排序。
问题二 将边添加到最小生成树中时,怎么样判断是否形成了回路。
问题一很好解决,采用排序算法进行排序即可。
问题二,处理方式是:记录顶点在"最小生成树"中的终点,顶点的终点是"在最小生成树中与它连通的最大顶点"(关于这一点,后面会通过图片给出说明)。然后每次需要将一条边添加到最小生存树时,判断该边的两个顶点的终点是否重合,重合的话则会构成回路。 以下图来进行说明:

在将<E,F> <C,D> <D,E>加入到最小生成树R中之后,这几条边的顶点就都有了终点:
(01) C的终点是F。
(02) D的终点是F。
(03) E的终点是F。
(04) F的终点是F。
关于终点,就是将所有顶点按照从小到大的顺序排列好之后;某个顶点的终点就是"与它连通的最大顶点"。
因此,接下来,虽然<C,E>是权值最小的边。但是C和E的重点都是F,即它们的终点相同,因此,将<C,E>加入最小生成树的话,会形成回路。这就是判断回路的方式。
克鲁斯卡尔算法的代码说明
有了前面的算法分析之后,下面我们来查看具体代码。这里选取"邻接矩阵"进行说明,对于"邻接表"实现的图在后面的源码中会给出相应的源码。
1. 基本定义

// 邻接矩阵
typedef struct _graph
{
char vexs[MAX]; // 顶点集合
int vexnum; // 顶点数
int edgnum; // 边数
int matrix[MAX][MAX]; // 邻接矩阵
}Graph, *PGraph; // 边的结构体
typedef struct _EdgeData
{
char start; // 边的起点
char end; // 边的终点
int weight; // 边的权重
}EData;
Graph是邻接矩阵对应的结构体。
vexs用于保存顶点,vexnum是顶点数,edgnum是边数;matrix则是用于保存矩阵信息的二维数组。例如,matrix[i][j]=1,则表示"顶点i(即vexs[i])"和"顶点j(即vexs[j])"是邻接点;matrix[i][j]=0,则表示它们不是邻接点。
EData是邻接矩阵边对应的结构体。
2. 克鲁斯卡尔算法
#include<stdio.h>
#include<stdlib.h>
#include<malloc.h>
#include<string.h>
#define MAX 100
#define INF -1
typedef struct Graph
{
char vexs[MAX];
int vexnum;
int edgnum;
int matrix[MAX][MAX];
}Graph,*PGraph; typedef struct EdgeData
{
char start;
char end;
int weight;
}EData; static int get_position(Graph g,char ch)
{
int i;
for(i=0;i<g.vexnum;i++)
if(g.vexs[i]==ch)
return i;
return -1;
} Graph* create_graph()
{
char vexs[]= {'A','B','C','D','E','F','G'};
int matrix[][7]= {
{0,12,INF,INF,INF,16,14},
{12,0,10,INF,INF,7,INF},
{INF,10,0,3,5,6,INF},
{INF,INF,3,0,4,INF,INF},
{INF,INF,5,4,0,INF,8},
{16,7,6,INF,2,0,9},
{14,INF,INF,INF,8,9,0}};
int vlen=sizeof(vexs)/sizeof(vexs[0]);
int i,j;
Graph *pG;
if((pG=(Graph*)malloc(sizeof(Graph)))==NULL)
return NULL;
memset(pG,0,sizeof(pG));
pG->vexnum=vlen;
for(i=0;i<pG->vexnum;i++)
pG->vexs[i]=vexs[i];
for(i=0;i<pG->vexnum;i++)
for(j=0;j<pG->vexnum;j++)
pG->matrix[i][j]=matrix[i][j];
for(i=0;i<pG->vexnum;i++)
{
for(j=0;j<pG->vexnum;j++)
{
if(i!=j&&pG->matrix[i][j]!=INF)
pG->edgnum++;
}
}
pG->edgnum/=2;
return pG;
} void print_graph(Graph G)
{
int i,j;
printf("Matrix Graph: \n");
for(i=0;i<G.vexnum;i++)
{
for(j=0;j<G.vexnum;j++)
printf("%10d ",G.matrix[i][j]);
printf("\n");
}
} EData* get_edges(Graph G)
{
EData *edges;
edges=(EData*)malloc(G.edgnum*sizeof(EData));
int i,j;
int index=0;
for(i=0;i<G.vexnum;i++)
{
for(j=i+1;j<G.vexnum;j++)
{
if(G.matrix[i][j]!=INF)
{
edges[index].start=G.vexs[i];
edges[index].end=G.vexs[j];
edges[index].weight=G.matrix[i][j];
index++;
}
}
}
return edges;
} void sort_edges(EData *edges,int elen)
{
int i,j;
for(i=0;i<elen;i++)
{
for(j=i+1;j<elen;j++)
{
if(edges[i].weight>edges[j].weight)
{
EData tmp=edges[i];
edges[i]=edges[j];
edges[j]=tmp;
}
}
}
} int get_end(int vends[],int i)
{
while(vends[i]!=0)
i=vends[i];
return i;
} void kruskal(Graph G)
{
int i,m,n,p1,p2;
int length;
int index=0;
int vends[MAX]={0};
EData rets[MAX];
EData *edges;
edges=get_edges(G);
sort_edges(edges,G.edgnum); for(i=0;i<G.edgnum;i++)
printf("%d ",edges[i].weight);
printf("\n");
for(i=0;i<G.edgnum;i++)
{
p1=get_position(G,edges[i].start);
p2=get_position(G,edges[i].end);
m=get_end(vends,p1);
n=get_end(vends,p2);
printf("m= %d,n= %d",m,n);
if(m!=n)
{
vends[m]=n;
rets[index++]=edges[i];
}
}
free(edges); length=0;
for(i=0;i<index;i++)
length+=rets[i].weight;
printf("Kruskal = %d\n",length);
for(i=0;i<index;i++)
printf("( %c , %c ) ",rets[i].start,rets[i].end);
printf("\n");
} int main()
{
Graph *pG;
pG=create_graph();
print_graph(*pG);
kruskal(*pG);
}
运行结果:
Kruskal算法 - C语言详解的更多相关文章
- JVM垃圾回收算法及回收器详解
引言 本文主要讲述JVM中几种常见的垃圾回收算法和相关的垃圾回收器,以及常见的和GC相关的性能调优参数. GC Roots 我们先来了解一下在Java中是如何判断一个对象的生死的,有些语言比如Pyth ...
- 原来Github上的README.md文件这么有意思——Markdown语言详解(sublime text2 版本)
一直想学习 Markdown 语言,想起以前读的一篇 赵凯强 的 博客 <原来Github上的README.md文件这么有意思——Markdown语言详解>,该篇博主 使用的是Mac系统, ...
- Kruskal算法(一)之 C语言详解
本章介绍克鲁斯卡尔算法.和以往一样,本文会先对克鲁斯卡尔算法的理论论知识进行介绍,然后给出C语言的实现.后续再分别给出C++和Java版本的实现. 目录 1. 最小生成树 2. 克鲁斯卡尔算法介绍 3 ...
- Java Web----EL(表达式语言)详解
Java Web中的EL(表达式语言)详解 表达式语言(Expression Language)简称EL,它是JSP2.0中引入的一个新内容.通过EL可以简化在JSP开发中对对象的引用,从而规范页面 ...
- 【机器学习】【条件随机场CRF-2】CRF的预测算法之维特比算法(viterbi alg) 详解 + 示例讲解 + Python实现
1.CRF的预测算法条件随机场的预测算法是给定条件随机场P(Y|X)和输入序列(观测序列)x,求条件概率最大的输出序列(标记序列)y*,即对观测序列进行标注.条件随机场的预测算法是著名的维特比算法(V ...
- Floyd算法(一)之 C语言详解
本章介绍弗洛伊德算法.和以往一样,本文会先对弗洛伊德算法的理论论知识进行介绍,然后给出C语言的实现.后续再分别给出C++和Java版本的实现. 目录 1. 弗洛伊德算法介绍 2. 弗洛伊德算法图解 3 ...
- Dijkstra算法(一)之 C语言详解
本章介绍迪杰斯特拉算法.和以往一样,本文会先对迪杰斯特拉算法的理论论知识进行介绍,然后给出C语言的实现.后续再分别给出C++和Java版本的实现. 目录 1. 迪杰斯特拉算法介绍 2. 迪杰斯特拉算法 ...
- Prim算法(一)之 C语言详解
本章介绍普里姆算法.和以往一样,本文会先对普里姆算法的理论论知识进行介绍,然后给出C语言的实现.后续再分别给出C++和Java版本的实现. 目录 1. 普里姆算法介绍 2. 普里姆算法图解 3. 普里 ...
- 拓扑排序(一)之 C语言详解
本章介绍图的拓扑排序.和以往一样,本文会先对拓扑排序的理论知识进行介绍,然后给出C语言的实现.后续再分别给出C++和Java版本的实现. 目录 1. 拓扑排序介绍 2. 拓扑排序的算法图解 3. 拓扑 ...
随机推荐
- Git的简单介绍
每次看到别人写Git的文章,同学中也有用Git感觉很高大上的感觉,工作中用的是SVN,周末倒腾了一下Git,Git是一款免费.开源的分布式版本控制系统,用于敏捷高效地处理任何或小或大的项目.Git 与 ...
- 分享七个绚丽夺目的JQuery导航(还有苹果、猪八戒等),有图有真相
今天来一起看看几个个人觉得比较好的导航.有好几个导航是仿的,比如仿苹果.仿猪八戒等等,但仿得还都不错.也有不少是基于jQuery的.特别是像我这样的懒人,就可以在这些基础上修修改改作为自己网站项目的导 ...
- mysql数据库查询优化
上两周一直想办法提高查询速度,取得一点效果,解决了部分问题,记下来以便将来自己查看. 由于公司没有专门的DBA,我自己对mysql数据库也不是很熟悉,而且这个JAVA开发的网络审计系统的管理系统,是经 ...
- freemarker 模板开发入门
数据模型 scalars标量:从根 root 開始指定它的路径,每级之间用点来分隔. 如:whatnot.fruits sequences 序列:使用数组的方括号方式来訪问一个序列的子变量. 如:an ...
- Strom优化指南
摘要:本文主要讲了笔者使用Strom中的一些优化建议 1.使用rebalance命令动态调整并发度 Storm计算以topology为单位,topology提交到Storm集群中运行后,通过storm ...
- 怎样以Root方式执行Xcode
粗略算一下,在第一次接触OSX的时候,我接触Windows已经有14年,刚開始用OSX和Xcode各种不习惯.可是用Xcode写了一星期的代码,我却有一种想把Windows和VS扔了的感觉(真的用着非 ...
- 优化后队列的实现(C语言实现)
上一篇中的队列的定义与实现(C语言实现) 中.不管是顺序队列还是链式队列,在尾加和删除头部的操作时.总有一个时间复杂度让人不惬意. 比方在顺序队列中,删除头部的操作后,总要将后面全部的结点都向前移动一 ...
- JavaWeb get请求乱码处理
乱码终极解决方案 Author:Marydon 一.安装好eclipse/myeclipse后,先将开发环境改成UTF-8; 更改工作空间编码方式 window-->preferences- ...
- JNI 在命令行窗口输入字符,不显所输入字符,显指定的掩饰符
//JNI-命令行窗口输入字符,显掩饰符.txt /* 目标:在命令行窗口输入字符,不显所输入字符,显指定的掩饰符 作者:tangshancheng@21cn.com*/ 1.KeyBoard.j ...
- java Properties的用法
Properties是一个特殊的Map,因为和IO流牵扯到了一块…… import java.io.BufferedReader;import java.io.File;import java.io. ...