使用ROS节点——Node & Master——roscore、rosrun、rosnode
1、Node
在ROS的世界里, 最小的进程单元就是节点( node) 。 一个软件包里可以有多个可执行文
件, 可执行文件在运行之后就成了一个进程(process), 这个进程在ROS中就叫做节点。
2、Master
由于机器人的元器件很多, 功能庞大, 因此实际运行时往往会运行众多的node, 负责感知世
界、 控制运动、 决策和计算等功能。 那么如何合理的进行调配、 管理这些node? 这就要利用
ROS提供给我们的节点管理器master, master在整个网络通信架构里相当于管理中心, 管理着
各个node。 node首先在master处进行注册, 之后master会将该node纳入整个ROS程序中。
node之间的通信也是先由master进行“牵线”, 才能两两的进行点对点通信。 当ROS程序启动
时, 第一步首先启动master, 由节点管理器处理依次启动node。
3、启动master和node
当我们要启动ROS时, 首先输入命令:
$ roscore
此时ROS master启动, 同时启动的还有 rosout 和 parameter server ,其中 rosout 是负责日
志输出的一个节点, 其作用是告知用户当前系统的状态, 包括输出系统的error、 warning等
等, 并且将log记录于日志文件中, parameter server 即是参数服务器, 它并不是一个node,
而是存储参数配置的一个服务器
启动node的语句是:
$ rosrun pkg_name node_name
Master、 Node之间以及Node之间的关系如下图所示:

4、rosrun和rosnode命令
rosrun命令的详细用法如下:
$ rosrun [--prefix cmd] [--debug] pkg_name node_name [ARGS]
rosrun将会寻找PACKAGE下的名为EXECUTABLE的可执行程序, 将可选参数ARGS传入。
例如在GDB下运行ros程序:
$ rosrun --prefix 'gdb -ex run --args' pkg_name node_name
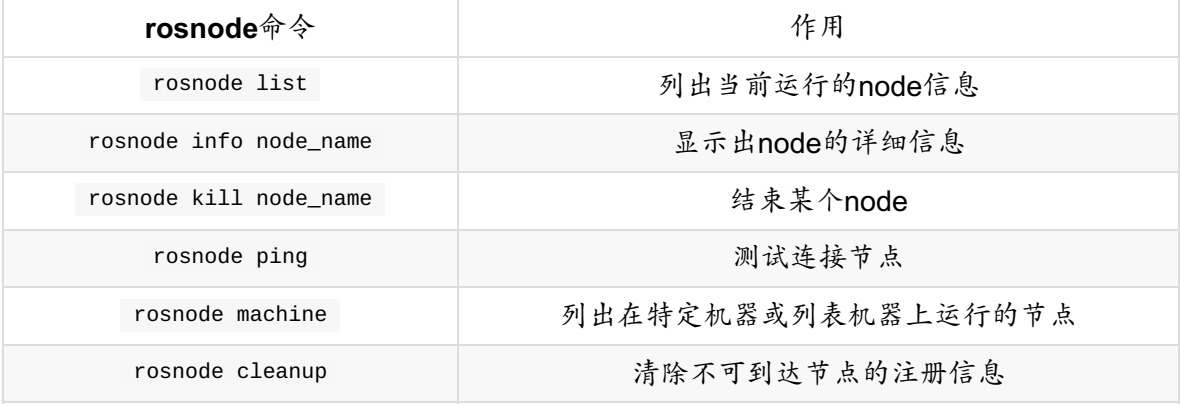
rosnode命令的详细作用列表如下:
使用ROS节点——Node & Master——roscore、rosrun、rosnode的更多相关文章
- elasticsearch负载均衡节点——客户端节点 node.master: false node.data: false 其他配置和master 数据节点一样
elasticSearch的配置文件中有2个参数:node.master和node.data.这两个参 数搭配使用时,能够帮助提供服务器性能. 数据节点node.master: false node. ...
- elasticsearch节点(角色)类型解释node.master和node.data
在生产环境下,如果不修改elasticsearch节点的角色信息,在高数据量,高并发的场景下集群容易出现脑裂等问题. 默认情况下,elasticsearch集群中每个节点都有成为主节点的资格,也都存储 ...
- ROS Learning-007 beginner_Tutorials ROS节点
ROS Indigo beginner_Tutorials-06 ROS节点 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.04.4 LT ...
- ROS学习笔记三(理解ROS节点)
要求已经在Linux系统中安装一个学习用的ros软件包例子: sudo apt-get install ros-indigo-ros-tutorials ROS图形概念概述 nodes:节点,一个节点 ...
- ROS节点理解--5
理解 ROS节点(原创博文,转载请标明出处--周学伟http://www.cnblogs.com/zxouxuewei/) Description: 本教程主要介绍 ROS 图(graph)概念 并讨 ...
- ROS学习(六)—— 理解ROS节点
一.准备工作 下载一个轻量级的模拟器 sudo apt-get install ros-kinetic-ros-tutorials 二.图概念的理解 1.Nodes:一个节点就是一个可执行文件,用来与 ...
- ROS-4 : ROS节点和主题
依照<ROS-3 : Catkin工作空间和ROS功能包>,创建catkin工作空间,并在起src下创建功能包ros_demo_pkg,依赖项为roscpp.std_msgs.action ...
- (五)ROS节点
一. 理解ROS 节点: ROS的节点: 可以说是一个可运行的程序.当然这个程序可不简单.因为它可以接受来自ROS网络上其他可运行程序的输出信息,也可以发送信息给ROS网络,被其他 ROS 可运行程序 ...
- 4.4 ROS节点名称重名
4.4 ROS节点名称重名 场景:ROS 中创建的节点是有名称的,C++初始化节点时通过API:ros::init(argc,argv,"xxxx");来定义节点名称,在Pytho ...
随机推荐
- node.js和JavaScript的关系
node.js是一个基于 Chrome V8 引擎的 JavaScript 运行时环境. 一.类比JavaScript和java JavaScript java V8 JVM node.js JRE ...
- [js常用]将秒转化为时分秒
内容引入至网络 <!DOCTYPE html> <html> <head> <meta http-equiv="Content-Type" ...
- Django基础六之ORM中的锁和事务
一 锁 行级锁 select_for_update(nowait=False, skip_locked=False) #注意必须用在事务里面,至于如何开启事务,我们看下面的事务一节. 返回一个锁住行直 ...
- 【node】用koa搭建一个增删改服务(一)
前文,vue分类里有一个日志demo的练习,这篇文章就是介绍针对日志demo的服务是怎么写的 一.koa搭建项目 1. npm init 2. npm install koa 二.建数据库 下面是项目 ...
- 数字时钟(DigitalClock)
数字时钟(DigitalClock) 这个其实就是我们平时看到的手机上面显示的时间 很简单 1.Activity //数字时钟 public class DigitalClockActivity ex ...
- 深入理解net core中的依赖注入、Singleton、Scoped、Transient(四)
相关文章: 深入理解net core中的依赖注入.Singleton.Scoped.Transient(一) 深入理解net core中的依赖注入.Singleton.Scoped.Transient ...
- unity3d中的自定义模型的顶点法线和建模软件中的术语“软硬边”和立方体
在unity3d中我是想用Mesh生成一个正方体,直到遇到了法线的问题. 我是想显示如下图所示的正方体,却发现法线设置上的问题. 这里我先使用了8个顶点 按照每个顶点一个法线的结果,只能是这样:(也就 ...
- 用Use Case获取需求的方法是否有缺陷,还有哪些地方需要改进
(提示:是否对所有应用领域都适用?使用的方便性?......) Use Case使用原则: 1.通过讲简单的故事来传递消息 讲故事是最有效的人与人交流信息的途径.通过讲故事(Use Case),团队成 ...
- JQuery-学习。
jQuery是一套跨浏览器的JavaScript库,简化HTML与JavaScript之间的操作.由约翰·雷西格(John Resig)在2006年1月的BarCamp NYC上发布第一个版本.目前是 ...
- sql建JOB语句
declare job_id pls_integer; begin sys.dbms_job.submit(job => job_id, what => 'proc_AGTAWBSTATI ...