PID:我应该何时计算积分项?
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助。作者Brett Beauregard的原文网址:http://brettbeauregard.com/blog/2011/07/pid-when-should-i-compute-the-integral-term/
最近有一个建议张贴到初学者的PID系列。争议的焦点是,如果您解决拉普拉斯域中的问题,它指定了执行积分项的不同方式。评论人士建议,与其看某一点的误差总和,不如看最后一个点的总和。
因此,当前的代码是这样的:
/*Compute all the working error variables*/
double input = *myInput;
double error = *mySetpoint - input;
ITerm+= (ki * error);
if(ITerm > outMax) ITerm= outMax;
else if(ITerm < outMin) ITerm= outMin;
double dInput = (input - lastInput); /*Compute PID Output*/
double output = kp * error + ITerm- kd * dInput;
建议是这样的:
/*Compute all the working error variables*/
double input = *myInput;
double error = *mySetpoint - input; double dInput = (input - lastInput); /*Compute PID Output*/
double output = kp * error + ITerm- kd * dInput; ITerm+= (ki * error);
if(ITerm > outMax) ITerm= outMax;
else if(ITerm < outMin) ITerm= outMin;
我从未见过这样做,但我想我应该试一试。我设计的测试是一个简单的设定值阶跃,然后是一个斜坡下降。

当控制器设置为默认的采样时间时,差异是无法察觉的。为了突出这两种方法之间的差异,我决定将PID采样时间从默认值100mS提高到5秒。
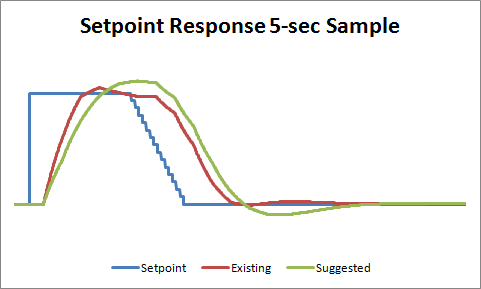
这里我们可以看到一个明显的赢家。现有的PID代码的性能比建议的要好,这可能是因为积分项对进程更改的响应要早5秒。但是为了确保我没有遗漏任何东西,我决定再做一次测试。我没有改变设定值,而是在系统中引入了负载变化。
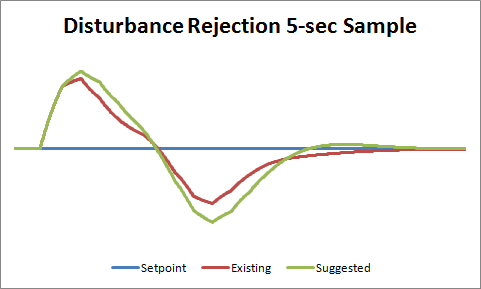
同样,现有的 PID 代码性能更好,处理负载变化更快。
那么判决呢?虽然这是一个有趣的锻炼,但我认为结果很清楚。我会保持原来的代码。
欢迎关注:

PID:我应该何时计算积分项?的更多相关文章
- Opencv中integral计算积分图
Paul Viola和Michael Jones在2001年首次将积分图应用在图像特征提取上,在他们的论文"Rapid Object Detection using a Boosted Ca ...
- PID教程
PID教程 介绍 本教程将向您展示了比例每一个比例项 (P)的特点,积分项(I)和微分项 (D) 控制,以及怎样使用它们来获得所需的响应.在本教程中,我们会考虑下面单位反馈系统: Plant[被控对象 ...
- PID算法笔记2
总所周知,PID算法是个很经典的东西.而做自平衡小车,飞行器PID是一个必须翻过的坎.因此本节我们来好好讲解一下PID,根据我在学习中的体会,力求通俗易懂.并举出PID的形象例子来帮助理解PID.一. ...
- PID算法(c 语言)(转)
PID算法(c 语言)(来自老外) #include <stdio.h> #include<math.h> //定义PID 的结构体 struct _pid { int pv; ...
- PID 通俗解释
PID 控制原理3 个故事:看完您就明白了.1.: PID 的故事小明接到这样一个任务:有一个水缸点漏水(而且漏水的速度还不一定固定不变),要求水面高度维持在某个位置,一旦发现水面高度低于要求位置,就 ...
- PID控制器开发笔记之四:梯形积分PID控制器的实现
从微积分的基本原理看,积分的实现是在无限细分的情况下进行的矩形加和计算.但是在离散状态下,时间间隔已经足够大,矩形积分在某些时候显得精度要低了一些,于是梯形积分被提出来以提升积分精度. 1.梯形积分基 ...
- PID算法(c 语言)(来自老外)
#include <stdio.h> #include<math.h> //定义PID 的结构体 struct _pid { int pv; // integer that c ...
- PID控制器的应用:控制网络爬虫抓取速度
一.初识PID控制器 冬天乡下人喜欢烤火取暖,常见的情形就是四人围着麻将桌,桌底放一盆碳火.有人觉得火不够大,那加点木炭吧,还不够,再加点.片刻之后,又觉得火太大,脚都快被烤熟了,那就取出一些木碳…… ...
- PID控制算法
PID控制算法 四轴如何起飞的原理 四轴飞行器的螺旋桨与空气发生相对运动,产生了向上的升力,当升力大于四轴的重力时四轴就可以起飞了. 四轴飞行器飞行过程中如何保持水平: 我们先假设一种理想状况:四个电 ...
随机推荐
- MSF MS12-020RDP漏洞攻击
Metasploit利用远程桌面协议RDP拒绝访问漏洞(MS12-020) 漏洞描述:BUGTRAQ ID: 52354 CVE ID: CVE-2012-0152 远程桌面协议(RDP, Remot ...
- $(...) is null
删冲突插件,jquery作为基础库,当然是没有理由被删了.这个方法最直接了. (2)将jquery的$方法改名,具体改名方法如下: jQuery.noConflict();//将变量$的控制权让渡给给 ...
- X.509_2
参考:你了解HTTPS,但你可能不了解X.509 地址:http://www.imooc.com/article/288067?block_id=tuijian_wz 参考:X.509证书的解析.验证 ...
- Centos7服务器搭建部署显卡计算环境以及常用软件的安装使用
安装好anaconda的服务器上会more你已经安装好jupyter notebook,执行下面的命令可以提供链接地址允许远程浏览器打开并访问: jupyter notebook --no-brows ...
- 关于微信小程序在ios中无法调起摄像头问题
这几天关于微信小程序开发关于wx.chooseVideo组件问题,因为自己一直是安卓手机上测试,可以调取摄像头,但是应用在ios上无法打开摄像头,困扰了好多天,经过反复查看官方文档,今天总算修复了这个 ...
- test20190901 NOI2019 模拟赛
0+0+0=0.还是太菜,看不出题型. Masodik 你要从 (0,0) 点走到 (n,m),每次只能往 x 轴或者 y 轴正方向移动一个单位距离.从 (i,j) 移动到 (i,j+1) 的代价为 ...
- SignalR入门二、使用 SignalR 2 实现服务器广播
一.概述 这篇教程通过实现一个股票报价的小程序来讲解如何使用SignalR进行服务器端的推送,服务器会模拟股票价格的波动,并把最新的股票价格推送给所有连接的客户端,最终的运行效果如下图所示. 教程:使 ...
- SparkSQL读写外部数据源-通过jdbc读写mysql数据库
object JdbcDatasourceTest { def main(args: Array[String]): Unit = { val spark = SparkSession .builde ...
- java构建简单的HTTP服务器
使用Java技术构建Web应用时, 我们通常离不开tomcat和jetty之类的servlet容器,这些Web服务器功能强大,性能强劲,深受欢迎,是运行大型Web应用的必备神器. 虽然Java的设计初 ...
- django-列表分页和排序
视图函数views.py # 种类id 页码 排序方式 # restful api -> 请求一种资源 # /list?type_id=种类id&page=页码&sort=排序方 ...