MATLAB神经网络(6) PID神经元网络解耦控制算法——多变量系统控制
6.1 案例背景
6.1.1 PID神经元网络结构
PID神经元网络从结构上可以分为输入层、隐含层和输出层三层,$n$个控制量的PID神经元网络包含$n$个并列的相同子网络,各个子网络间既相互独立,又通过网络连接权值相互联系。每个子网络的输入层有两个神经元,分别接收控制量的目标值和当前值。每个子网络的隐含层由比例元、积分元和微分元构成,分别对应着PID控制器中的比例控制、积分控制和微分控制。PID神经元网络按被控系统控制量的个数可以分为控制单变量系统的单控制量神经元网络和控制多变量系统的多控制量神经元网络。其中单控制量神经元网络是PID神经元网络的基本形式,多控制量神经元网络可以看成是多个单控制量神经元网络的组合形式。
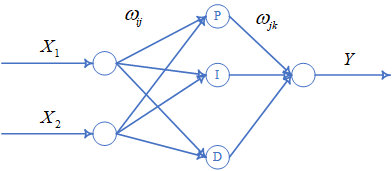
$X_{1}$是控制量的控制目标,$X_{2}$是控制量当前值,$Y$是神经元网络计算得到的控制律,${\omega _{ij}}$和${\omega _{jk}}$是网络权值,从中可以看到单控制量神经元网络是一个三层前向神经元网络,网络结构为2-3-1,隐含层包含比例元、积分元和微分元三个神经元。
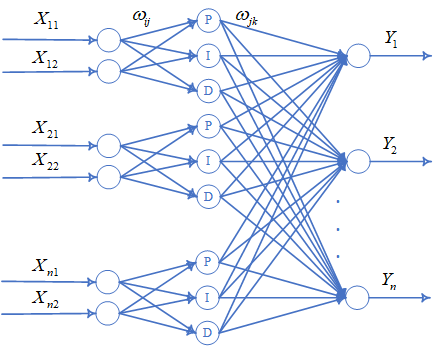
多控制量神经元网络可以看成多个单控制量网络的并联连接,$X_{11},X_{21},...,X_{n1}$是控制量的控制目标,$X_{12},X_{22},...,X_{n2}$是控制量的当前值,$Y_{1},Y_{2},...,Y_{n}$是多控制量神经元网络计算得到的控制律,${\omega _{ij}}$和${\omega _{jk}}$是网络权值。
6.1.2 控制率
- 输入层:输出数据$x_{si}$等于输入数据$X_{si}$:${x_{si}}(k) = {X_{si}}(k)$;
- 隐含层:输入值\[ne{t_{sj}}(k) = \sum\limits_{i = 1}^2 {{\omega _{ij}}{x_{si}}(k)\;\;\;j = 1,2,3} \]比例神经元\[{u_{s1}} = ne{t_{s1}}(k)\]积分神经元\[{u_{s2}} = ne{t_{s2}}(k) + ne{t_{s2}}(k - 1)\]微分神经元\[{u_{s3}} = ne{t_{s3}}(k) - ne{t_{s3}}(k - 1)\]
- 输出层:\[{y_k} = \sum\limits_{s = 1}^n {\sum\limits_{j = 1}^3 {{\omega _{jk}}{u_{sj}}(k)} } \]
6.1.3 权值修正
误差计算公式:\[J = \sum {E = \sum\limits_{k = 1}^n {{{[{y_h}(k) - r(k)]}^2}} } \]其中$n$为输出节点个数,$y_{h}(k)$为预测输出,$r(k)$为控制目标。
- 输出层到隐含层:\[{\omega _{jk}}(k + 1) = {\omega _{jk}}(k) - \eta \frac{{\partial J}}{{\partial {\omega _{jk}}}}\]
- 输入层到输出层:\[{\omega _{ij}}(k + 1) = {\omega _{ij}}(k) - \eta \frac{{\partial J}}{{\partial {\omega _{ij}}}}\]
其中$\eta$为学习速率。
6.1.4 控制对象
传递函数:
\[\left\{ \begin{array}{l}
{y_1}(k) = 0.4{y_1}(k - 1) + {u_1}(k - 1)/[1 + {u_1}{(k - 1)^2}] + 0.2{u_1}{(k - 1)^3} + 0.5{u_2}(k - 1) + 0.3{y_2}(k - 1)\\
{y_2}(k) = 0.2{y_2}(k - 1) + {u_2}(k - 1)/[1 + {u_2}{(k - 1)^2}] + 0.4{u_2}{(k - 1)^3} + 0.2{u_1}(k - 1) + 0.3{y_3}(k - 1)\\
{y_3}(k) = 0.3{y_3}(k - 1) + {u_3}(k - 1)/[1 + {u_3}{(k - 1)^2}] + 0.4{u_3}{(k - 1)^3} + 0.4{u_2}(k - 1) + 0.3{y_1}(k - 1)
\end{array} \right.\]
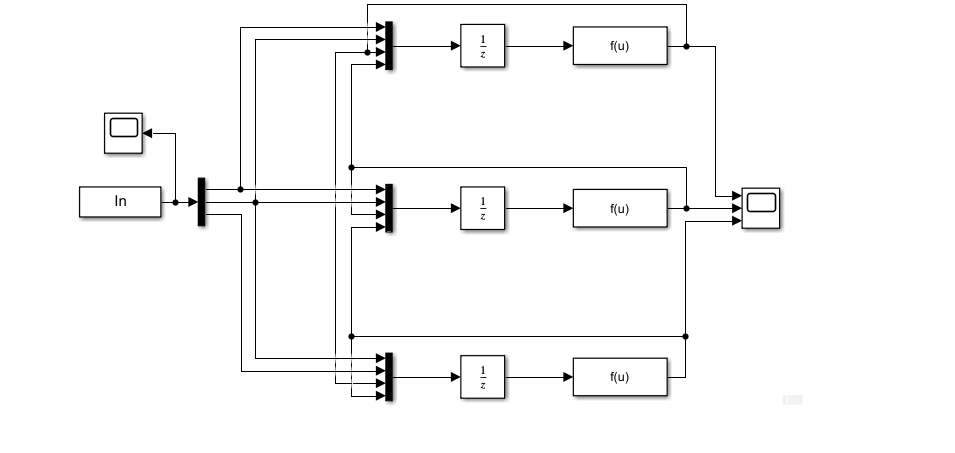
6.2 模型建立
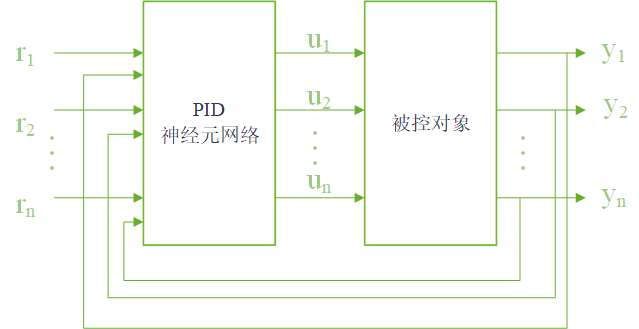
$r_{1}$,r_{2},...,r_{n}$是控制器目标,$u_{1}$,u_{2},...,u_{n}$为控制器规律,$y_{1}$,y_{2},...,y_{n}$为控制器当前值。
3个控制量——3个单神经元网络。
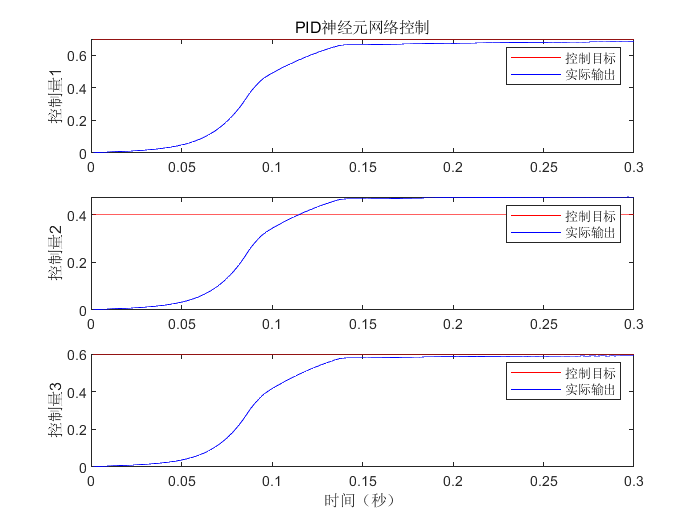
控制量初始值[0,0,0],控制目标为[0.7,0.4,0.6],控制时间间隔0.001s。
6.3 编程实现
6.3.1 初始化
- %% 基于PID神经网络的系统控制算法
- %% 清空环境变量
- clc
- clear
- %% 网络结构初始化
- rate1=0.006;rate2=0.001; %学习率
- K=3;
- y_1=zeros(3,1);y_2=y_1; %输出值
- u_1=zeros(3,1);u_2=u_1; %控制率
- h1i=zeros(3,1);h1i_1=h1i; %第一个控制量
- h2i=zeros(3,1);h2i_1=h2i; %第二个控制量
- h3i=zeros(3,1);h3i_1=h3i; %第三个控制量
- x1i=zeros(3,1);x2i=x1i;x3i=x2i;x1i_1=x1i;x2i_1=x2i;x3i_1=x3i; %隐含层输入
- %权值初始化
- k0=0.03;
- %第一层权值
- w11=k0*rand(3,2);
- w12=k0*rand(3,2);
- w13=k0*rand(3,2);
- %第二层权值
- w21=k0*rand(1,9);
- w22=k0*rand(1,9);
- w23=k0*rand(1,9);
- %值限定
- ynmax=1;ynmin=-1; %系统输出值限定
- xpmax=1;xpmin=-1; %P节点输出限定
- qimax=1;qimin=-1; %I节点输出限定
- qdmax=1;qdmin=-1; %D节点输出限定
- uhmax=1;uhmin=-1; %输出结果限定
6.3.2 优化
- %% 网络迭代优化
- for k=1:1:300
- %% 控制量输出计算
- %--------------------------------网络前向计算--------------------------
- %系统输出
- y1(k)=(0.4*y_1(1)+u_1(1)/(1+u_1(1)^2)+0.2*u_1(1)^3+0.5*u_1(2))+0.3*y_1(2);
- y2(k)=(0.2*y_1(2)+u_1(2)/(1+u_1(2)^2)+0.4*u_1(2)^3+0.2*u_1(1))+0.3*y_1(3);
- y3(k)=(0.3*y_1(3)+u_1(3)/(1+u_1(3)^2)+0.4*u_1(3)^3+0.4*u_1(2))+0.3*y_1(1);
- r1(k)=0.7;r2(k)=0.4;r3(k)=0.6; %控制目标
- %系统输出限制
- yn=[y1(k),y2(k),y3(k)];
- yn(yn>ynmax)=ynmax;
- yn(yn<ynmin)=ynmin;
- %输入层输出
- x1o=[r1(k);yn(1)];x2o=[r2(k);yn(2)];x3o=[r3(k);yn(3)];
- %隐含层
- x1i=w11*x1o;
- x2i=w12*x2o;
- x3i=w13*x3o;
- %比例神经元P计算
- xp=[x1i(1),x2i(1),x3i(1)];
- xp(xp>xpmax)=xpmax;
- xp(xp<xpmin)=xpmin;
- qp=xp;
- h1i(1)=qp(1);h2i(1)=qp(2);h3i(1)=qp(3);
- %积分神经元I计算
- xi=[x1i(2),x2i(2),x3i(2)];
- qi_1=[h1i(2),h2i(2),h3i(2)];
- qi=qi_1+xi;
- qi(qi>qimax)=qimax;
- qi(qi<qimin)=qimin;
- h1i(2)=qi(1);h2i(2)=qi(2);h3i(2)=qi(3);
- %微分神经元D计算
- xd=[x1i(3),x2i(3),x3i(3)];
- xd_1=[x1i_1(3),x2i_1(3),x3i_1(3)];
- qd=xd-xd_1;
- qd(qd>qdmax)=qdmax;
- qd(qd<qdmin)=qdmin;
- h1i(3)=qd(1);h2i(3)=qd(2);h3i(3)=qd(3);
- %输出层计算
- wo=[w21;w22;w23];
- qo=[h1i',h2i',h3i'];qo=qo';
- uh=wo*qo;
- uh(uh>uhmax)=uhmax;
- uh(uh<uhmin)=uhmin;
- u1(k)=uh(1);u2(k)=uh(2);u3(k)=uh(3); %控制律
- %% 网络权值修正
- %---------------------网络反馈修正----------------------
- %计算误差
- error=[r1(k)-y1(k);r2(k)-y2(k);r3(k)-y3(k)];
- error1(k)=error(1);error2(k)=error(2);error3(k)=error(3);
- J(k)=(error(1)^2+error(2)^2+error(3)^2); %调整大小
- ypc=[y1(k)-y_1(1);y2(k)-y_1(2);y3(k)-y_1(3)];
- uhc=[u_1(1)-u_2(1);u_1(2)-u_2(2);u_1(3)-u_2(3)];
- %隐含层和输出层权值调整
- %调整w21
- Sig1=sign(ypc./(uhc(1)+0.00001));
- dw21=sum(error.*Sig1)*qo';
- w21=w21+rate2*dw21;
- %调整w22
- Sig2=sign(ypc./(uh(2)+0.00001));
- dw22=sum(error.*Sig2)*qo';
- w22=w22+rate2*dw22;
- %调整w23
- Sig3=sign(ypc./(uh(3)+0.00001));
- dw23=sum(error.*Sig3)*qo';
- w23=w23+rate2*dw23;
- %输入层和隐含层权值调整
- delta2=zeros(3,3);
- wshi=[w21;w22;w23];
- %调整w11
- for t=1:1:3
- delta2(1:3,t)=error(1:3).*sign(ypc(1:3)./(uhc(t)+0.00000001));
- end
- for j=1:1:3
- sgn(j)=sign((h1i(j)-h1i_1(j))/(x1i(j)-x1i_1(j)+0.00001));
- end
- s1=sgn'*[r1(k),y1(k)];
- wshi2_1=wshi(1:3,1:3);
- alter=zeros(3,1);
- dws1=zeros(3,2);
- for j=1:1:3
- for p=1:1:3
- alter(j)=alter(j)+delta2(p,:)*wshi2_1(:,j);
- end
- end
- for p=1:1:3
- dws1(p,:)=alter(p)*s1(p,:);
- end
- w11=w11+rate1*dws1;
- %调整w12
- for j=1:1:3
- sgn(j)=sign((h2i(j)-h2i_1(j))/(x2i(j)-x2i_1(j)+0.0000001));
- end
- s2=sgn'*[r2(k),y2(k)];
- wshi2_2=wshi(:,4:6);
- alter2=zeros(3,1);
- dws2=zeros(3,2);
- for j=1:1:3
- for p=1:1:3
- alter2(j)=alter2(j)+delta2(p,:)*wshi2_2(:,j);
- end
- end
- for p=1:1:3
- dws2(p,:)=alter2(p)*s2(p,:);
- end
- w12=w12+rate1*dws2;
- %调整w13
- for j=1:1:3
- sgn(j)=sign((h3i(j)-h3i_1(j))/(x3i(j)-x3i_1(j)+0.0000001));
- end
- s3=sgn'*[r3(k),y3(k)];
- wshi2_3=wshi(:,7:9);
- alter3=zeros(3,1);
- dws3=zeros(3,2);
- for j=1:1:3
- for p=1:1:3
- alter3(j)=(alter3(j)+delta2(p,:)*wshi2_3(:,j));
- end
- end
- for p=1:1:3
- dws3(p,:)=alter2(p)*s3(p,:);
- end
- w13=w13+rate1*dws3;
- %参数更新
- u_2=u_1;u_1=uh;
- y_2=y_1;y_1=yn;
- h1i_1=h1i;h2i_1=h2i;h3i_1=h3i;
- x1i_1=x1i;x2i_1=x2i;x3i_1=x3i;
- end
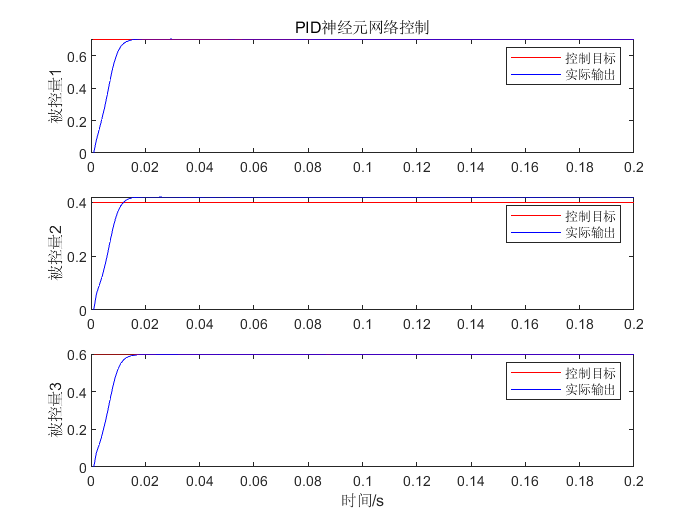
6.3.3 结果分析
- %% 结果分析
- time=0.001*(1:k);
- figure(1)
- subplot(3,1,1)
- plot(time,r1,'r-',time,y1,'b-');
- title('PID神经元网络控制','fontsize',12);
- ylabel('控制量1','fontsize',12);
- legend('控制目标','实际输出');
- subplot(3,1,2)
- plot(time,r2,'r-',time,y2,'b-');
- ylabel('控制量2','fontsize',12);
- legend('控制目标','实际输出');
- subplot(3,1,3)
- plot(time,r3,'r-',time,y3,'b-');
- xlabel('时间(秒)','fontsize',12);ylabel('控制量3','fontsize',12);
- legend('控制目标','实际输出');
- figure(2)
- plot(time,u1,'r-',time,u2,'g-',time,u3,'b');
- title('PID神经网络提供给对象的控制输入');
- xlabel('时间'),ylabel('被控量');
- legend('u1','u2','u3');grid

- figure(3)
- figure(3)
- plot(time,J,'r-');
- axis([0,0.2,0,1]);grid
- title('控制误差曲线','fontsize',12);
- xlabel('时间','fontsize',12);ylabel('控制误差','fontsize',12);

6.3.4 Simulink仿真

6.4 扩展
6.4.1 增加动量项
\[\begin{array}{l}
{\omega _{jk}}(k + 1) = {\omega _{jk}}(k) - \eta \frac{{\partial J}}{{\partial {\omega _{jk}}}} + {\eta _1}[{\omega _{jk}}(k) - {\omega _{jk}}(k - 1)]\\
{\omega _{ij}}(k + 1) = {\omega _{ij}}(k) - \eta \frac{{\partial J}}{{\partial {\omega _{ij}}}} + {\eta _1}[{\omega _{ij}}(k) - {\omega _{ij}}(k - 1)]
\end{array}\]
6.4.2 神经元系数
\[\begin{array}{l}
{u_{s1}} = {k_p} \cdot ne{t_{s1}}(k)\\
{u_{s2}} = {k_i} \cdot [ne{t_{s2}}(k) + ne{t_{s2}}(k - 1)]\\
{u_{s3}} = {k_d} \cdot [ne{t_{s3}}(k) - ne{t_{s3}}(k - 1)]
\end{array}\]
6.4.3 PID神经元网络权值优化
粒子群/遗传算法——解决可能陷入局部最优的问题,改善控制效果。
MATLAB神经网络(6) PID神经元网络解耦控制算法——多变量系统控制的更多相关文章
- MATLAB神经网络原理与实例精解视频教程
教程内容:<MATLAB神经网络原理与实例精解>随书附带源程序.rar9.随机神经网络.rar8.反馈神经网络.rar7.自组织竞争神经网络.rar6.径向基函数网络.rar5.BP神经网 ...
- 《精通Matlab神经网络》例10-16的新写法
<精通Matlab神经网络>书中示例10-16,在创建BP网络时,原来的写法是: net = newff(minmax(alphabet),[S1 S2],{'logsig' 'logsi ...
- Matlab神经网络
1. <MATLAB神经网络原理与实例精解> 2. B站:https://search.bilibili.com/all?keyword=matlab&from_source=na ...
- 12.Matlab神经网络工具箱
概述: 1 人工神经网络介绍 2 人工神经元 3 MATLAB神经网络工具箱 4 感知器神经网络 5 感知器神经网络 5.1 设计实例分析 clear all; close all; P=[ ; ]; ...
- MATLAB神经网络(1)之R练习
)之R练习 将在MATLAB神经网络中学到的知识用R进行适当地重构,再写一遍,一方面可以加深理解和记忆,另一方面练习R,比较R和MATLAB的不同.如要在R中使用之前的数据,应首先在MATLAB中用w ...
- matlab神经网络实验
第0节.引例 本文以Fisher的Iris数据集作为神经网络程序的测试数据集.Iris数据集可以在http://en.wikipedia.org/wiki/Iris_flower_data_set ...
- Matlab神经网络工具箱学习之二
螃蟹的分类 这个例子的目的是根据螃蟹的品种.背壳的长宽等等属性来判断螃蟹的性别,雄性还是雌性. 训练数据一共有六个属性: species, frontallip, rearwidth, length, ...
- Matlab神经网络工具箱学习之一
1.神经网络设计的流程 2.神经网络设计四个层次 3.神经网络模型 4.神经网络结构 5.创建神经网络对象 6.配置神经网络的输入输出 7.理解神经网络工具箱的数据结构 8.神经网络训练 1.神经网络 ...
- matlab神经网络工具箱创建神经网络
为了看懂师兄的文章中使用的方法,研究了一下神经网络 昨天花了一天的时间查怎么写程序,但是费了半天劲,不能运行,百度知道里倒是有一个,可以运行的,先贴着做标本 % 生成训练样本集 clear all; ...
随机推荐
- 常用的mysql操作
总结一下常用的mysql操作,避免下次遇到类似情况重复地去百度. 方法不是唯一的,但记录一种可行的方法就可以了. 遇到新的问题再继续补充. 1.增加一个列 ALTER TABLE 表名 ADD COL ...
- Qt QImage的浅拷贝与深拷贝
首先简单说说什么是浅拷贝和深拷贝:浅拷贝就比如像引用类型,而深拷贝就比如值类型,即浅拷贝是共用一块内存的,而深拷贝是复制一份内容. 我们再来看看QImage类的几个构造函数: // 浅拷贝 QImag ...
- git 第一次上传本地代码到远程仓库,解决 ! [rejected] master -> master (non-fast-forward)错误
使用git想GitHub远程仓库上传代码的基本步骤一般是 初始化为git仓库 git init 添加所有要提交的文件 git add . 本次提交说明 git commit -m '提交说明' 关联G ...
- python3多进程爬虫(第二卷)
上卷中讲到,我有4个进程,可是我要同时爬取20+数据怎么办,很明显上卷的语法公式不可以,所以现在我引入线程池 现在看一下线程池的语法 看一下爬虫: 注意圈中重点
- CF-1110C-Meaningless Operations
题意: 输入q,然后输入q个a,对于每个a,找到一个b,使gcd(a ^ b, a & b)最大,输出这个最大的gcd: 思路: 用k表示a二进制最高位的二进制编号,1,2,4,8对应1,2, ...
- Docker的部署安装(CentOS)
环境准备 操作系统需求 为兼容企业级应用,学习选用Centos7做为部署安装Docker的系统平台 # 通过以下命令可查看系统版本和内核版本等信息 cat /etc/redhat-release #- ...
- MyBatis 逆向工程介绍
1. 概念: 逆向工程就是根据数据库中对应的表在项目工程中生成相应的MyBatis代码(XXXMapper.java/XXXMapper.xml/Moudle(XXX)),逆向工程生成的代码可以进行简 ...
- python中sorted和sorted 、reversed和reverse的使用。
#encoding = utf-8 list = [1,8,3,6] print(list.sort()) #None print(list) #[1,3,6,8] print(sorted(list ...
- 吴裕雄--天生自然HTML学习笔记:启动TOMCAT服务器时出现乱码解决方法
- javaWeb简单登录实现验证数据库
用户登录案例需求: 1.编写login.html登录页面 username & password 两个输入框 2.使用Druid数据库连接池技术,操作mysql,day14数据库中user表 ...