ESP8266 SDK开发: 外设篇-串口
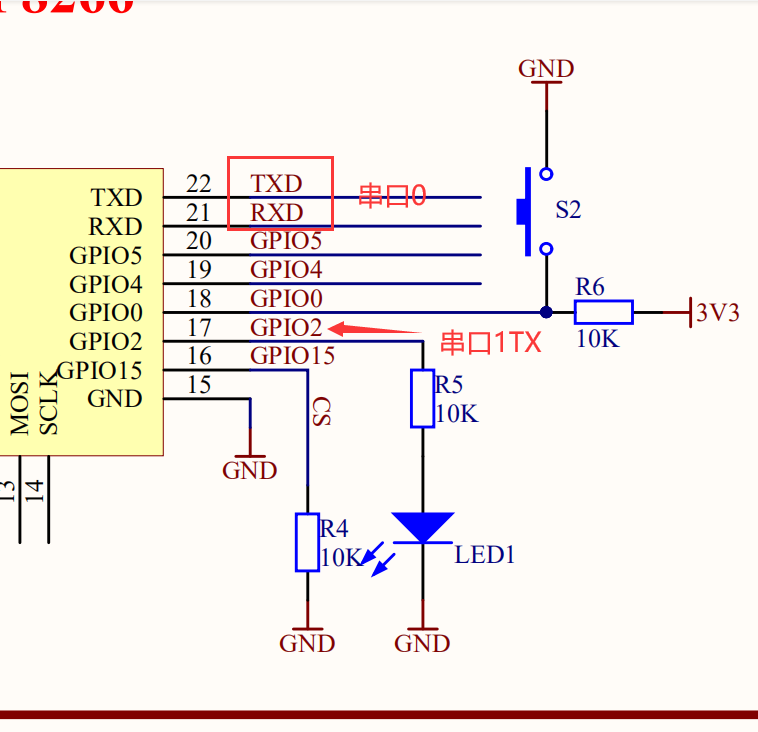
串口分布
NONOS
NONOS
NONOS
1.配置串口
2.按照上面的配置以后,接收中断进入这里面

3.用户需要知道的事情
串口内部自带一个FIFO缓存,数据接收以后先缓存到内部FIFO缓存里面
内部FIFO满了以后进入FIFO满中断
串口打开了串口超时(空闲)中断:超过两个字节的时间没有接受到数据,进入串口超时(空闲)中断
接收思路:
如果进入满中断,在满中断中提取FIFO里面的数据
如果进入空闲中断,在空闲中断中提取FIFO里面的数据
无论怎样,程序最终都会进入空闲中断!
这节接收数据采用缓存
具体细节请参考:
https://www.cnblogs.com/yangfengwu/p/12770504.html
4.直接上菜
4.1创建缓存
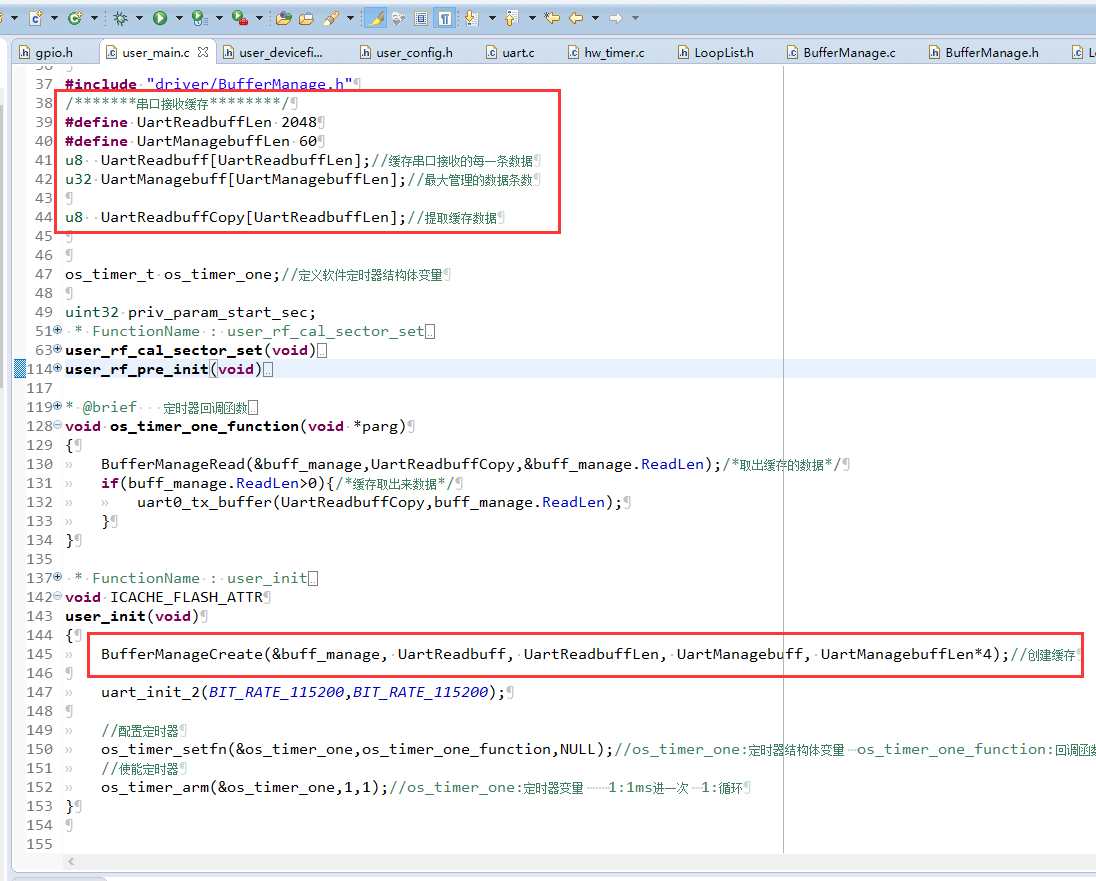
#include "driver/BufferManage.h"
/*******串口接收缓存********/
#define UartReadbuffLen 2048
#define UartManagebuffLen 60
u8 UartReadbuff[UartReadbuffLen];//缓存串口接收的每一条数据
u32 UartManagebuff[UartManagebuffLen];//最大管理的数据条数 u8 UartReadbuffCopy[UartReadbuffLen];//提取缓存数据 BufferManageCreate(&buff_manage, UartReadbuff, UartReadbuffLen, UartManagebuff, UartManagebuffLen*);//创建缓存
4.2往缓存里面存数据
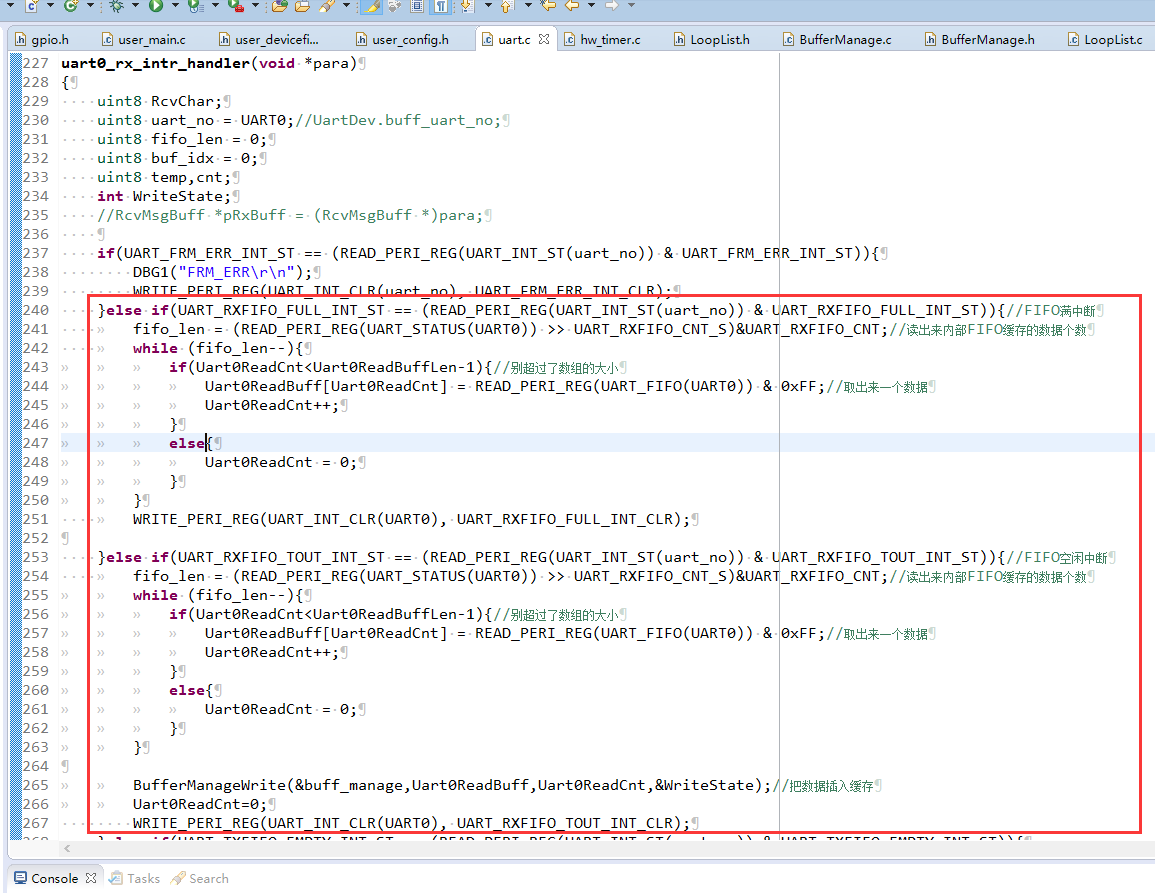
#include "driver/BufferManage.h" #define Uart0ReadBuffLen 2048
uint8 Uart0ReadBuff[Uart0ReadBuffLen];//串口一次性最大接收的数据个数
u32 Uart0ReadCnt=; LOCAL void
uart0_rx_intr_handler(void *para)
{
uint8 RcvChar;
uint8 uart_no = UART0;//UartDev.buff_uart_no;
uint8 fifo_len = ;
uint8 buf_idx = ;
uint8 temp,cnt;
int WriteState;
//RcvMsgBuff *pRxBuff = (RcvMsgBuff *)para; if(UART_FRM_ERR_INT_ST == (READ_PERI_REG(UART_INT_ST(uart_no)) & UART_FRM_ERR_INT_ST)){
DBG1("FRM_ERR\r\n");
WRITE_PERI_REG(UART_INT_CLR(uart_no), UART_FRM_ERR_INT_CLR);
}else if(UART_RXFIFO_FULL_INT_ST == (READ_PERI_REG(UART_INT_ST(uart_no)) & UART_RXFIFO_FULL_INT_ST)){//FIFO满中断
fifo_len = (READ_PERI_REG(UART_STATUS(UART0)) >> UART_RXFIFO_CNT_S)&UART_RXFIFO_CNT;//读出来内部FIFO缓存的数据个数
while (fifo_len--){
if(Uart0ReadCnt<Uart0ReadBuffLen-){//别超过了数组的大小
Uart0ReadBuff[Uart0ReadCnt] = READ_PERI_REG(UART_FIFO(UART0)) & 0xFF;//取出来一个数据
Uart0ReadCnt++;
}
else{
Uart0ReadCnt = ;
}
}
WRITE_PERI_REG(UART_INT_CLR(UART0), UART_RXFIFO_FULL_INT_CLR); }else if(UART_RXFIFO_TOUT_INT_ST == (READ_PERI_REG(UART_INT_ST(uart_no)) & UART_RXFIFO_TOUT_INT_ST)){//FIFO空闲中断
fifo_len = (READ_PERI_REG(UART_STATUS(UART0)) >> UART_RXFIFO_CNT_S)&UART_RXFIFO_CNT;//读出来内部FIFO缓存的数据个数
while (fifo_len--){
if(Uart0ReadCnt<Uart0ReadBuffLen-){//别超过了数组的大小
Uart0ReadBuff[Uart0ReadCnt] = READ_PERI_REG(UART_FIFO(UART0)) & 0xFF;//取出来一个数据
Uart0ReadCnt++;
}
else{
Uart0ReadCnt = ;
}
} BufferManageWrite(&buff_manage,Uart0ReadBuff,Uart0ReadCnt,&WriteState);//把数据插入缓存
Uart0ReadCnt=;
WRITE_PERI_REG(UART_INT_CLR(UART0), UART_RXFIFO_TOUT_INT_CLR);
}else if(UART_TXFIFO_EMPTY_INT_ST == (READ_PERI_REG(UART_INT_ST(uart_no)) & UART_TXFIFO_EMPTY_INT_ST)){
DBG("e");
CLEAR_PERI_REG_MASK(UART_INT_ENA(UART0), UART_TXFIFO_EMPTY_INT_ENA);
#if UART_BUFF_EN
tx_start_uart_buffer(UART0);
#endif
//system_os_post(uart_recvTaskPrio, 1, 0);
WRITE_PERI_REG(UART_INT_CLR(uart_no), UART_TXFIFO_EMPTY_INT_CLR); }else if(UART_RXFIFO_OVF_INT_ST == (READ_PERI_REG(UART_INT_ST(uart_no)) & UART_RXFIFO_OVF_INT_ST)){
WRITE_PERI_REG(UART_INT_CLR(uart_no), UART_RXFIFO_OVF_INT_CLR);
DBG1("RX OVF!!\r\n");
}
}
4.3提取缓存数据,并输出
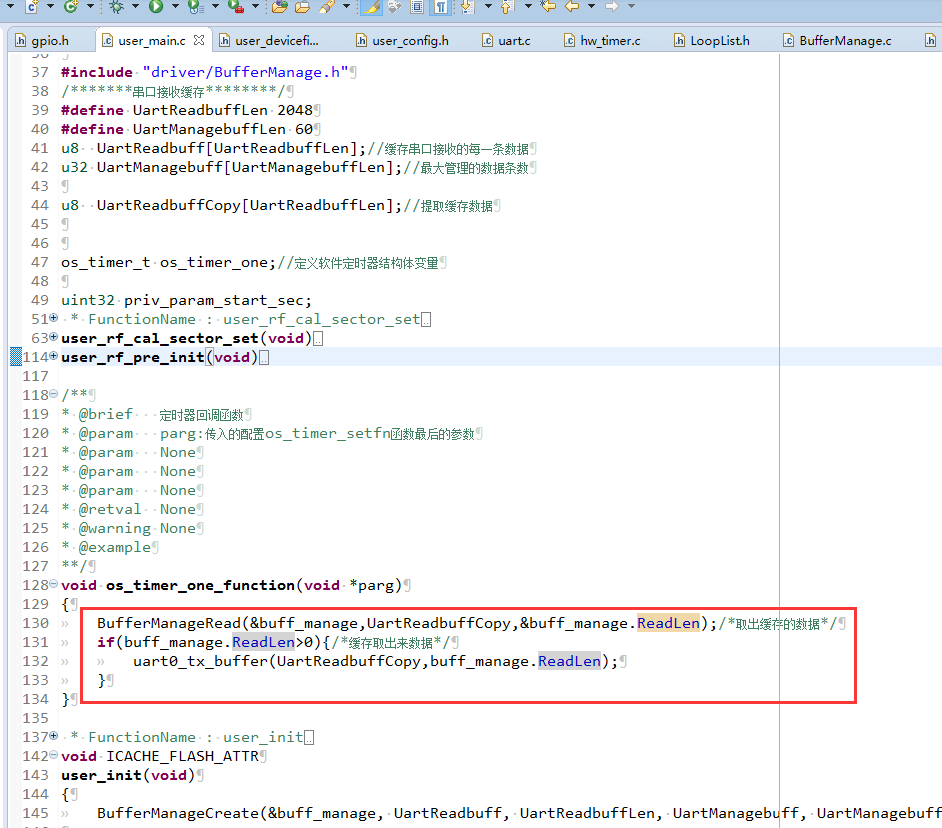
BufferManageRead(&buff_manage,UartReadbuffCopy,&buff_manage.ReadLen);/*取出缓存的数据*/
if(buff_manage.ReadLen>){/*缓存取出来数据*/
uart0_tx_buffer(UartReadbuffCopy,buff_manage.ReadLen);
}
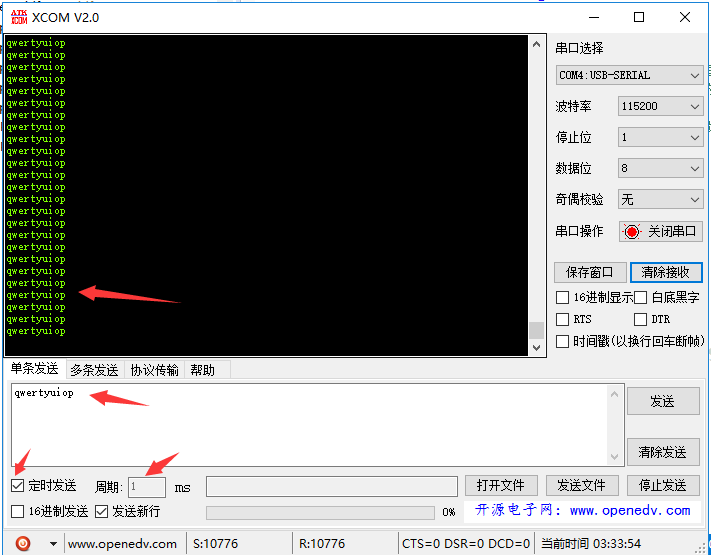
测试
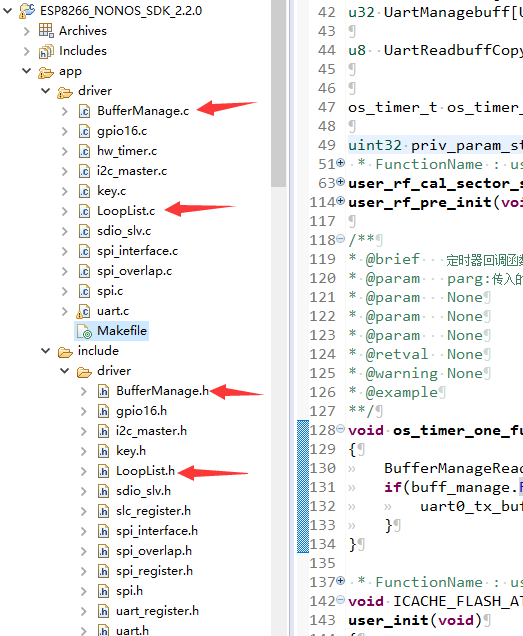
如果想应用到自己的项目,拷贝以下文件
RTOS
RTOS
RTOS
1.默认所有的数据都使用串口0输出
官方提供了函数可以选择printf利用哪一个串口输出
配置printf使用串口1打印输出,波特率115200
(注:这样配置对于调试程序很有帮助,printf当做程序运行的日志打印)
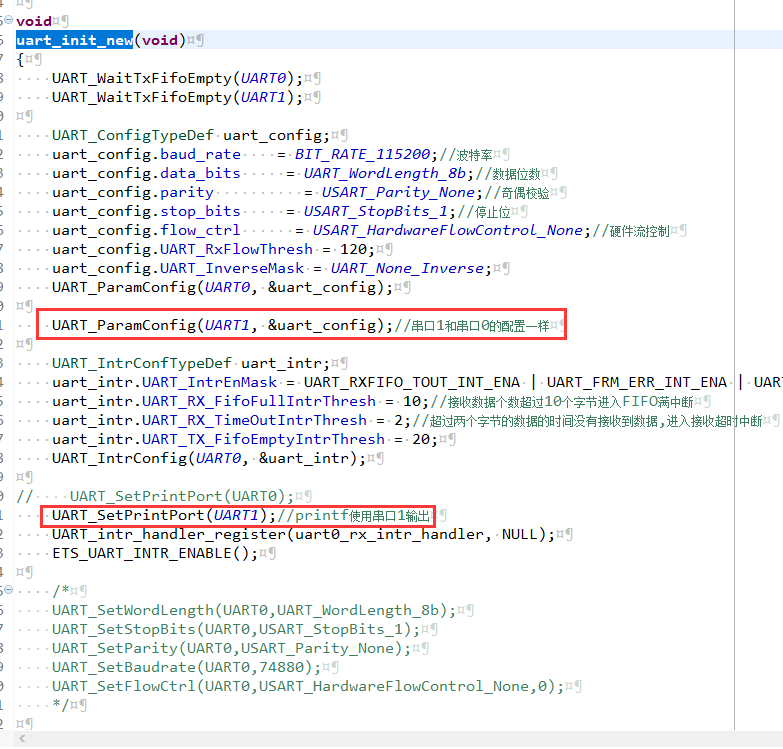
void
uart_init_new(void)
{
UART_WaitTxFifoEmpty(UART0);
UART_WaitTxFifoEmpty(UART1); UART_ConfigTypeDef uart_config;
uart_config.baud_rate = BIT_RATE_115200;//波特率
uart_config.data_bits = UART_WordLength_8b;//数据位数
uart_config.parity = USART_Parity_None;//奇偶校验
uart_config.stop_bits = USART_StopBits_1;//停止位
uart_config.flow_ctrl = USART_HardwareFlowControl_None;//硬件流控制
uart_config.UART_RxFlowThresh = ;
uart_config.UART_InverseMask = UART_None_Inverse;
UART_ParamConfig(UART0, &uart_config); UART_ParamConfig(UART1, &uart_config);//串口1和串口0的配置一样 UART_IntrConfTypeDef uart_intr;
//配置启用哪些些中断 数据接收超时 接收数据错误 缓存满中断 发送空中断
uart_intr.UART_IntrEnMask = UART_RXFIFO_TOUT_INT_ENA | UART_FRM_ERR_INT_ENA | UART_RXFIFO_FULL_INT_ENA | UART_TXFIFO_EMPTY_INT_ENA;
uart_intr.UART_RX_FifoFullIntrThresh = ;//接收数据个数超过10个字节进入FIFO满中断
uart_intr.UART_RX_TimeOutIntrThresh = ;//超过两个字节的数据的时间没有接收到数据,进入接收超时中断
uart_intr.UART_TX_FifoEmptyIntrThresh = ;
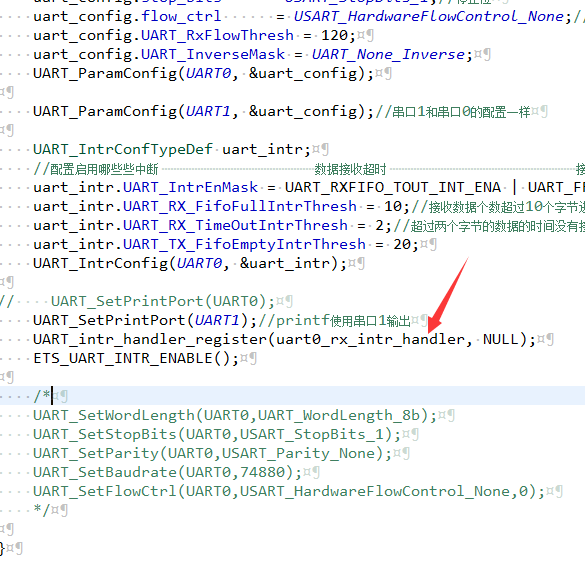
UART_IntrConfig(UART0, &uart_intr); // UART_SetPrintPort(UART0);
UART_SetPrintPort(UART1);//printf使用串口1输出
UART_intr_handler_register(uart0_rx_intr_handler, NULL);
ETS_UART_INTR_ENABLE(); /*
UART_SetWordLength(UART0,UART_WordLength_8b);
UART_SetStopBits(UART0,USART_StopBits_1);
UART_SetParity(UART0,USART_Parity_None);
UART_SetBaudrate(UART0,74880);
UART_SetFlowCtrl(UART0,USART_HardwareFlowControl_None,0);
*/ }
串口接收数据说明
1.该模块默认内部有个128字节的缓存区,默认接收的数据存入缓存区里面
在中断接收函数里面,从缓存里面获取数据
2.咱们在串口中断函数里面,是在满中断和接收超时中断里面获取串口接收的数据

串口接收数据典型程序
1.具体请参考: https://www.cnblogs.com/yangfengwu/p/11669373.html
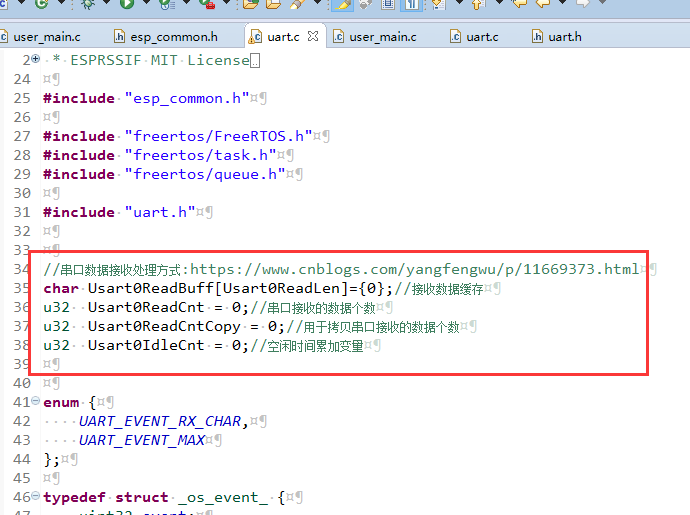
2.uart.c
//串口数据接收处理方式:https://www.cnblogs.com/yangfengwu/p/11669373.html
char Usart0ReadBuff[Usart0ReadLen]={};//接收数据缓存
u32 Usart0ReadCnt = ;//串口接收的数据个数
u32 Usart0ReadCntCopy = ;//用于拷贝串口接收的数据个数
u32 Usart0IdleCnt = ;//空闲时间累加变量
LOCAL void
uart0_rx_intr_handler(void *para)
{
uint8 RcvChar;
uint8 uart_no = UART0;//UartDev.buff_uart_no;
uint8 fifo_len = ;
uint8 buf_idx = ;
// uint8 fifo_tmp[128] = {0};
uint32 uart_intr_status = READ_PERI_REG(UART_INT_ST(uart_no)) ;
while (uart_intr_status != 0x0) {
if (UART_FRM_ERR_INT_ST == (uart_intr_status & UART_FRM_ERR_INT_ST)) {//数据错误
//printf("FRM_ERR\r\n");
WRITE_PERI_REG(UART_INT_CLR(uart_no), UART_FRM_ERR_INT_CLR);
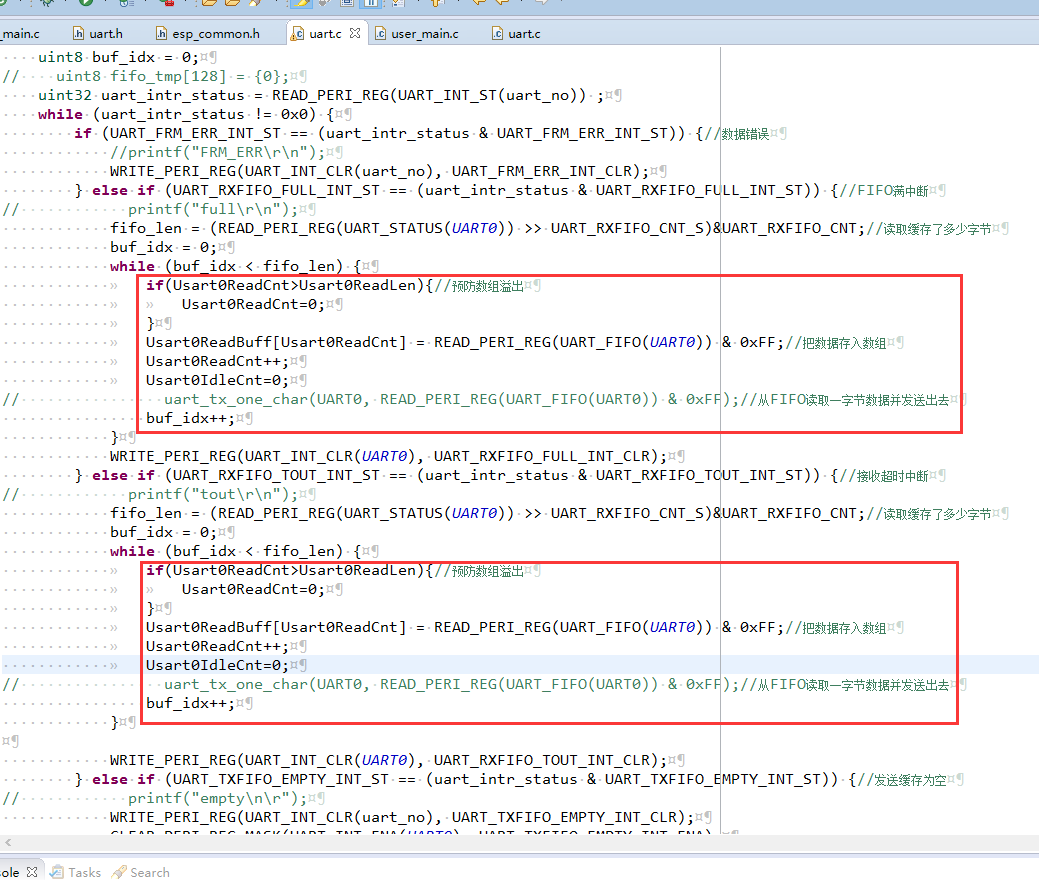
} else if (UART_RXFIFO_FULL_INT_ST == (uart_intr_status & UART_RXFIFO_FULL_INT_ST)) {//FIFO满中断
// printf("full\r\n");
fifo_len = (READ_PERI_REG(UART_STATUS(UART0)) >> UART_RXFIFO_CNT_S)&UART_RXFIFO_CNT;//读取缓存了多少字节
buf_idx = ;
while (buf_idx < fifo_len) {
if(Usart0ReadCnt>Usart0ReadLen){//预防数组溢出
Usart0ReadCnt=;
}
Usart0ReadBuff[Usart0ReadCnt] = READ_PERI_REG(UART_FIFO(UART0)) & 0xFF;//把数据存入数组
Usart0ReadCnt++;
Usart0IdleCnt=;
// uart_tx_one_char(UART0, READ_PERI_REG(UART_FIFO(UART0)) & 0xFF);//从FIFO读取一字节数据并发送出去
buf_idx++;
}
WRITE_PERI_REG(UART_INT_CLR(UART0), UART_RXFIFO_FULL_INT_CLR);
} else if (UART_RXFIFO_TOUT_INT_ST == (uart_intr_status & UART_RXFIFO_TOUT_INT_ST)) {//接收超时中断
// printf("tout\r\n");
fifo_len = (READ_PERI_REG(UART_STATUS(UART0)) >> UART_RXFIFO_CNT_S)&UART_RXFIFO_CNT;//读取缓存了多少字节
buf_idx = ;
while (buf_idx < fifo_len) {
if(Usart0ReadCnt>Usart0ReadLen){//预防数组溢出
Usart0ReadCnt=;
}
Usart0ReadBuff[Usart0ReadCnt] = READ_PERI_REG(UART_FIFO(UART0)) & 0xFF;//把数据存入数组
Usart0ReadCnt++;
Usart0IdleCnt=;
// uart_tx_one_char(UART0, READ_PERI_REG(UART_FIFO(UART0)) & 0xFF);//从FIFO读取一字节数据并发送出去
buf_idx++;
} WRITE_PERI_REG(UART_INT_CLR(UART0), UART_RXFIFO_TOUT_INT_CLR);
} else if (UART_TXFIFO_EMPTY_INT_ST == (uart_intr_status & UART_TXFIFO_EMPTY_INT_ST)) {//发送缓存为空
// printf("empty\n\r");
WRITE_PERI_REG(UART_INT_CLR(uart_no), UART_TXFIFO_EMPTY_INT_CLR);
CLEAR_PERI_REG_MASK(UART_INT_ENA(UART0), UART_TXFIFO_EMPTY_INT_ENA);
} else {
//skip
}
uart_intr_status = READ_PERI_REG(UART_INT_ST(uart_no)) ;
}
}
3.uart.h
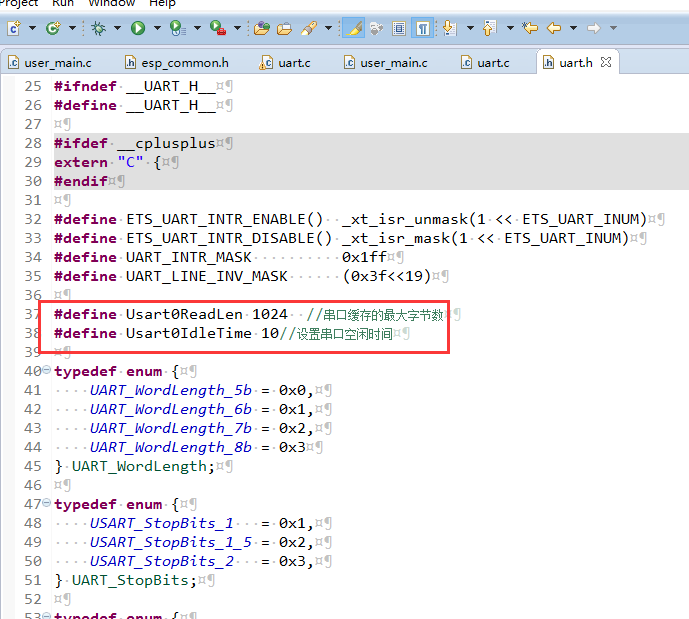
#define Usart0ReadLen 1024 //串口缓存的最大字节数
#define Usart0IdleTime 10//设置串口空闲时间
4.user_main.h

#include "uart.h" extern char Usart0ReadBuff[Usart0ReadLen];//接收数据缓存
extern u32 Usart0ReadCnt;//串口接收的数据个数
extern u32 Usart0ReadCntCopy;//用于拷贝串口接收的数据个数
extern u32 Usart0IdleCnt;//空闲时间累加变量
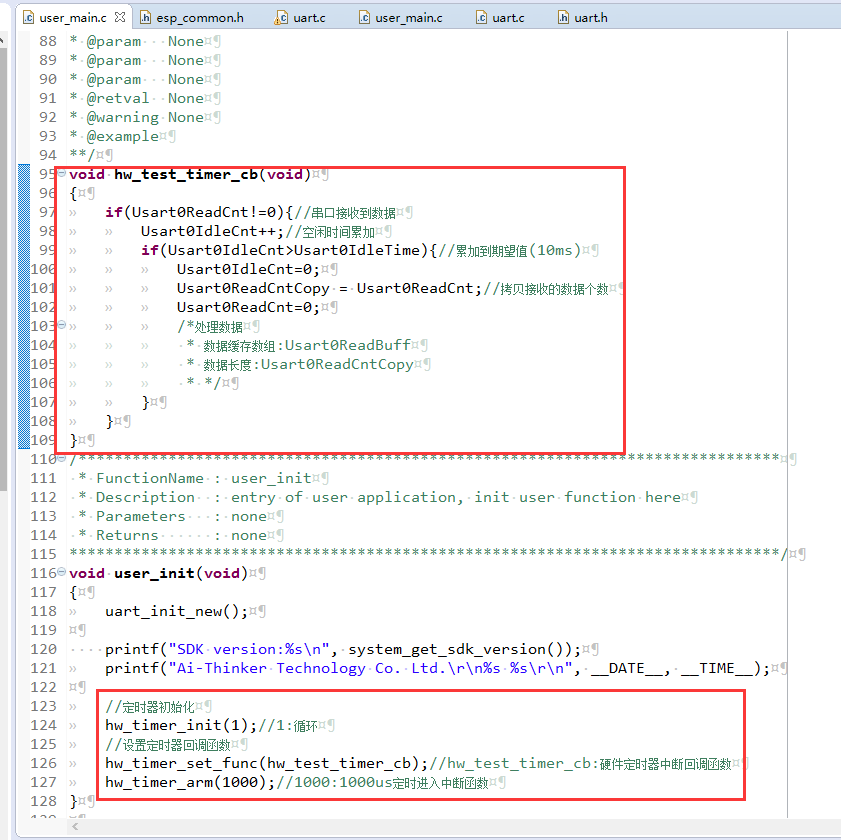
/**
* @brief 硬件定时器中断回调函数
* @param None
* @param None
* @param None
* @param None
* @retval None
* @warning None
* @example
**/
void hw_test_timer_cb(void)
{
if(Usart0ReadCnt!=){//串口接收到数据
Usart0IdleCnt++;//空闲时间累加
if(Usart0IdleCnt>Usart0IdleTime){//累加到期望值(10ms)
Usart0IdleCnt=;
Usart0ReadCntCopy = Usart0ReadCnt;//拷贝接收的数据个数
Usart0ReadCnt=;
/*处理数据
* 数据缓存数组:Usart0ReadBuff
* 数据长度:Usart0ReadCntCopy
* */
}
}
}
/******************************************************************************
* FunctionName : user_init
* Description : entry of user application, init user function here
* Parameters : none
* Returns : none
*******************************************************************************/
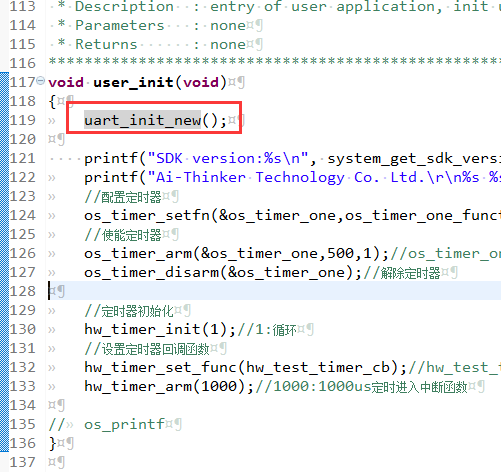
void user_init(void)
{
uart_init_new(); printf("SDK version:%s\n", system_get_sdk_version());
printf("Ai-Thinker Technology Co. Ltd.\r\n%s %s\r\n", __DATE__, __TIME__); //定时器初始化
hw_timer_init();//1:循环
//设置定时器回调函数
hw_timer_set_func(hw_test_timer_cb);//hw_test_timer_cb:硬件定时器中断回调函数
hw_timer_arm();//1000:1000us定时进入中断函数
}
串口发送
1.说明
串口发送实际上是把要发送的数据拷贝到128字节的数据发送缓存区
然后由模块内部发送
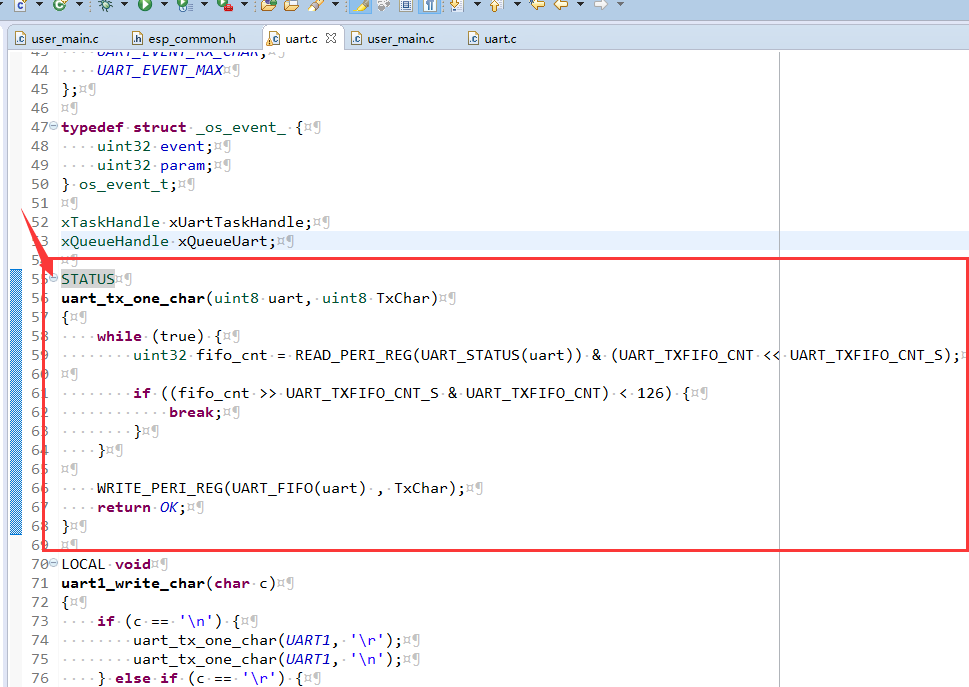
2.发送函数

3.为了可以在别的文件中使用,去掉函数前面的LOCAL 标识
测试串口返回接收到的信息
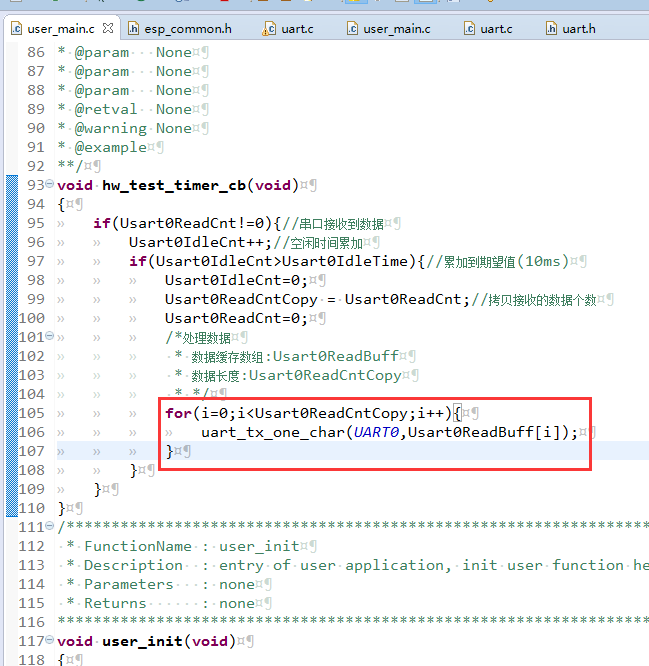
/**
* @brief 硬件定时器中断回调函数
* @param None
* @param None
* @param None
* @param None
* @retval None
* @warning None
* @example
**/
void hw_test_timer_cb(void)
{
if(Usart0ReadCnt!=){//串口接收到数据
Usart0IdleCnt++;//空闲时间累加
if(Usart0IdleCnt>Usart0IdleTime){//累加到期望值(10ms)
Usart0IdleCnt=;
Usart0ReadCntCopy = Usart0ReadCnt;//拷贝接收的数据个数
Usart0ReadCnt=;
/*处理数据
* 数据缓存数组:Usart0ReadBuff
* 数据长度:Usart0ReadCntCopy
* */
for(i=;i<Usart0ReadCntCopy;i++){
uart_tx_one_char(UART0,Usart0ReadBuff[i]);
}
}
}
}
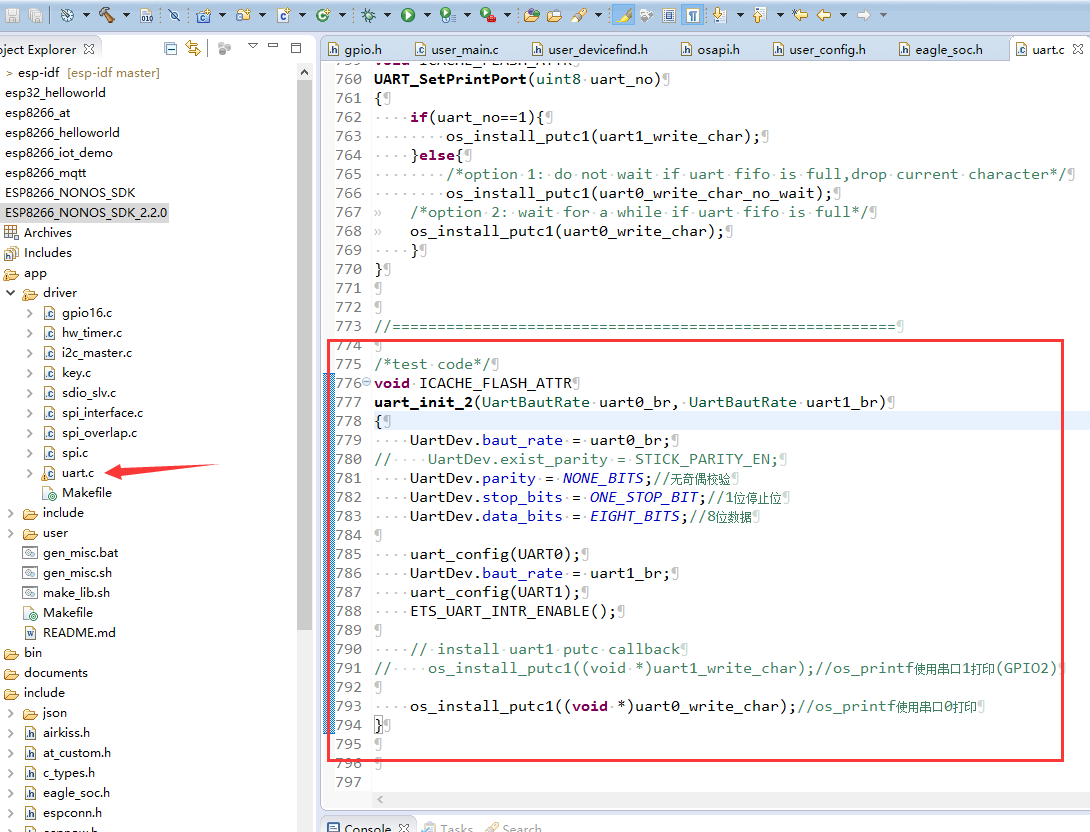
NONOS_SDK版本区别
NONOS提供了使用内部Task接收数据
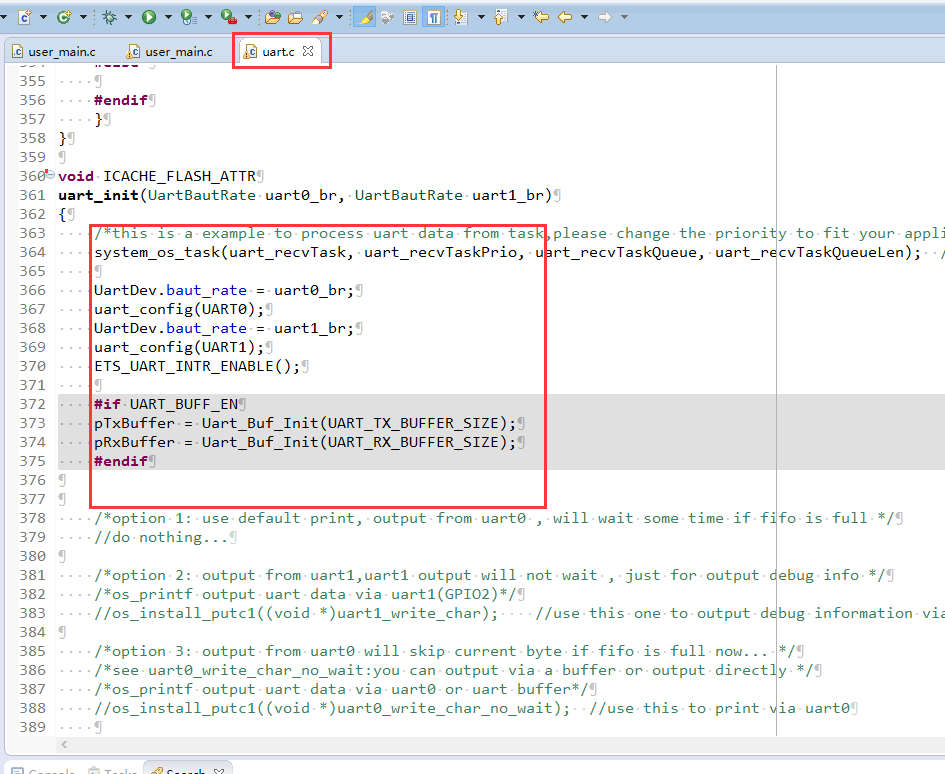
如果不想使用Task,想用上面的方式实现
在最后有一个 uart_init_2 可使用这个函数初始化串口
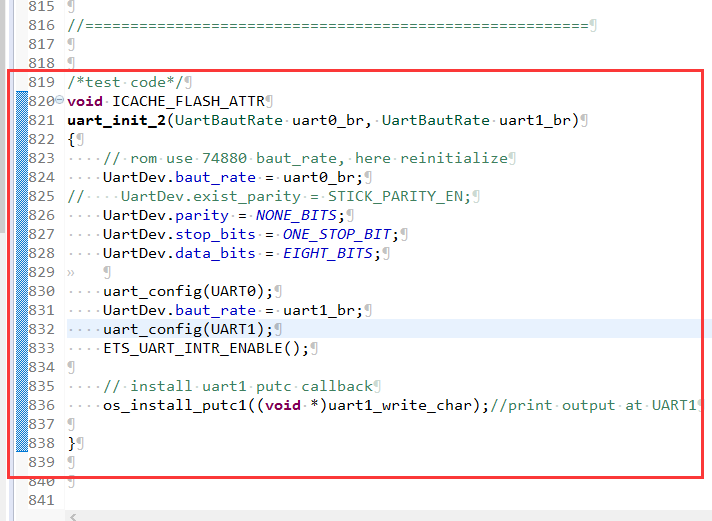
void ICACHE_FLASH_ATTR
uart_init_2(UartBautRate uart0_br, UartBautRate uart1_br)
{
// rom use 74880 baut_rate, here reinitialize
UartDev.baut_rate = uart0_br;
// UartDev.exist_parity = STICK_PARITY_EN;
UartDev.parity = NONE_BITS;
UartDev.stop_bits = ONE_STOP_BIT;
UartDev.data_bits = EIGHT_BITS; uart_config(UART0);
UartDev.baut_rate = uart1_br;
uart_config(UART1);
ETS_UART_INTR_ENABLE(); // install uart1 putc callback
os_install_putc1((void *)uart1_write_char);//print output at UART1 }
os_install_putc1((void *)uart0_write_char);//print output at UART0
ESP8266 SDK开发: 外设篇-串口的更多相关文章
- ESP8266 SDK开发: 外设篇-GPIO输出高低电平
前言 官方提供了两个函数 GPIO_OUTPUT_SET(gpio_no, bit_value) 设置GPIO2输出高电平 GPIO_OUTPUT_SET(2, 1); 设置GPIO2输出低电平 GP ...
- ESP8266 SDK开发: 外设篇-GPIO输入检测
前言 官方提供了以下函数检测引脚输入状态 检测GPIO5 if( GPIO_INPUT_GET(5) == 0 ) GPIO5当前为低电平 if( GPIO_INPUT_GET(5) == 1 ) G ...
- ESP8266 LUA脚本语言开发: 外设篇-串口
https://nodemcu.readthedocs.io/en/master/modules/uart/ 串口发送数据 发送一个16进制到串口 uart.write(0, 0xaa) 注: 之所以 ...
- ESP8266 SDK开发: 测试下诱人的程序
前言 这一节测试一下诱人的程序 实现的功能,APP通过SmartConfig给Wi-Fi模块配网并绑定设备,然后通过MQTT远程控制开发板的继电器, APP显示ESP8266采集的温湿度数据. 简而言 ...
- esp8266 SDK开发之环境搭建
最近在弄这个WiFi模块,发现网上SDK开发方面的资料很少,发现了一套视频教程,不过主讲人的讲课方式实在受不了.对基于SDK开发感兴趣的同学可以通过本帖在Ubuntu系统上通过Eclipes搭建开发环 ...
- ESP8266 LUA脚本语言开发: 外设篇-GPIO输出高低电平
前言 所有的LUA开发API参考 https://nodemcu.readthedocs.io/en/master/en/modules/gpio/ 原理图 让GPIO2输出高电平只需 gpio.mo ...
- ESP8266 LUA脚本语言开发: 外设篇-定时器,延时,看门狗
https://nodemcu.readthedocs.io/en/master/modules/tmr/ local mytimer1 = tmr.create() function TimeFun ...
- ESP8266 LUA脚本语言开发: 外设篇-GPIO中断检测
https://nodemcu.readthedocs.io/en/master/modules/gpio/#gpiomode 测试引脚 GPIO0 gpio.mode(,gpio.INT) func ...
- ESP8266 LUA脚本语言开发: 外设篇-GPIO输入检测
咱使用 GPIO0 https://nodemcu.readthedocs.io/en/master/modules/gpio/#gpioread 第一种 GPIO设置为输出的状态下读取引脚状态 gp ...
随机推荐
- js正则 - 限制用户名只能中文、字母和数字 , 不能包含特殊字符
/^[\u4E00-\u9FA5A-Za-z0-9]+$/
- 《Netlogo多主体建模入门》笔记4
4- 从Langton的蚂蚁看Turtle与Patch的交互 这只蚂蚁从10000步开始,就会自发地 “建桥” Turtle与Patch就好比是,一个方块和一个格子的关系. 一个格子上可以 ...
- NSString 常见数据类型转换:转NSInteger , NSDate(互转)
1. NSString转NSInteger, 转int (float, double类似 ) 1.1正常情况 , NSString所包含内容确能转化为int的类型 NSString *sNumber ...
- 7.3 Varnish VCL 常用函数
- 装系统:Win7,机子是Dell 5460,有半高的mSATA SSD
问题描述:Dell Vostro 5460有一个机械盘,有一个半高的mSATA SSD,现在想将系统重装到mSATA SSD上,但是机子BIOS的Boot选项没有mSATA,只有机械盘,怎么办? 解决 ...
- Vue.js模板语法介绍
Vue.js模板.指令 模板语法概述 1.如何理解前端渲染? 把数据填充到HTML标签中,一般我们使用Ajax将数据从后台查询出,结合模板() 2.前端渲染方式 2.1.原生js拼接字符串 使 ...
- 吴裕雄 Bootstrap 前端框架开发——Bootstrap 辅助类:关闭图标
<!DOCTYPE html> <html> <head> <meta charset="utf-8"> <title> ...
- NO20文件属性--inode--block-企业场景题
壹 Linux文件属性描述:在Linux里一切皆文件Linux系统中的文件或目录的属性主要包括:索引节点(inode).文件类型.权限属性.链接数.所归属的用户和用户组.最近修改时间等内容. 例子: ...
- 图像检索:CEDD(Color and Edge Directivity Descriptor)算法 颜色和边缘的方向性描述符
颜色和边缘的方向性描述符(Color and Edge Directivity Descriptor,CEDD) 本文节选自论文<Android手机上图像分类技术的研究>. CEDD具有抽 ...
- delphi对ZIP解压
Delphi 对GZIP解压 作者:admin 来源:未知 日期:2010/5/9 13:08:46 人气:获取失败 标签: QQ空间新浪微博腾讯微博腾讯朋友QQ收藏百度空间百度贴吧更多0 呵呵,终于 ...