基于Hdl Coder实现卡尔曼滤波算法
总所周知,FPGA极其不擅长复杂算法的运算,但是如果项目中又涉及一些高级算法的实现,在没有可封装IP核调用的形式下,我们应该如何进行程序开发呢?今夕已经是2020年,我们一味依赖于用verilog写代码无异于用汇编写程序,这种方式无异于古时钻木取火的原始时代。如今用Matlab联调FPGA,基于simulink的Hdl Coder模块搭建算法模型,再自动生成代码才是高阶有效的终极玩法。尤其在一些信号处理领域,掌握Matlab联调FPGA的技术更是必备技能。
下面以卡尔曼滤波为例,具体讲述如何基于Hdl Coder实现卡尔曼滤波算法实现。首先简单介绍下卡尔曼滤波算法:
卡尔曼滤波(Kalman filtering)是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包含系统噪声和干扰的影响,所以最优估计也可看作是滤波过程。简单来说,它就是利用过去的状态值和现在的测量值来更正现在的状态值,利用卡尔曼增益不停在估计和测量中寻找最优化的平衡值。
Kalman filtering的经典五方程,在进行卡尔曼滤波的程序设计前必须要充分理解这五个方程的定义、推导以及相关变量的设定。
(1) 对于现在状态的预测方程:
X(k|k-1)=A X(k-1|k-1)+B U(k) ……….. (1)
P(k|k-1)=A P(k-1|k-1) A’+Q ……… (2)
(2)对于现在状态的更新方程:(拿过去的真实值得到现在的预测值,再集合现在的测量值Z(k),进行现在状态值的更新)
X(k|k)= X(k|k-1)+Kg(k) (Z(k)-H X(k|k-1)) ……… (3)
Kg(k)= P(k|k-1) H’ / (H P(k|k-1) H’ + R) ……… (4)
P(k|k)=(I-Kg(k) H)P(k|k-1) ……… (5)
其中Z(k)=H X(k)+V(k)为观测方程。
对于上述方程要明确以下几个变量的赋值:
1) 状态转移矩阵:A
2) 系统控制变量:U(k)
3) 观测矩阵:H
4)系统状态初值:X(0|0)
5)系统协方差:P(0|0)
6)R:测量噪声
7)Q:过程噪声
8)Z:观测值
这7个变量要根据不同的产品以及应用场景进行具体赋值,其中对于单系统输入,变量赋值为:
1)A=1(状态转移矩阵),U(k)=0(系统控制变量), H=1(观测矩阵),B=1(对于一维变量,全为1)
2)Z观测值就是系统外部灌进来的实时变量。
3)系统协方差:P(0|0),可以采样一段时间后进行运算保证在kalman滤波器工作前进行赋值即可。
4)对于卡尔曼应用,最难确定的就是Q、R这两个噪声,只能根据实际模型,不停调整以逼近最优解。
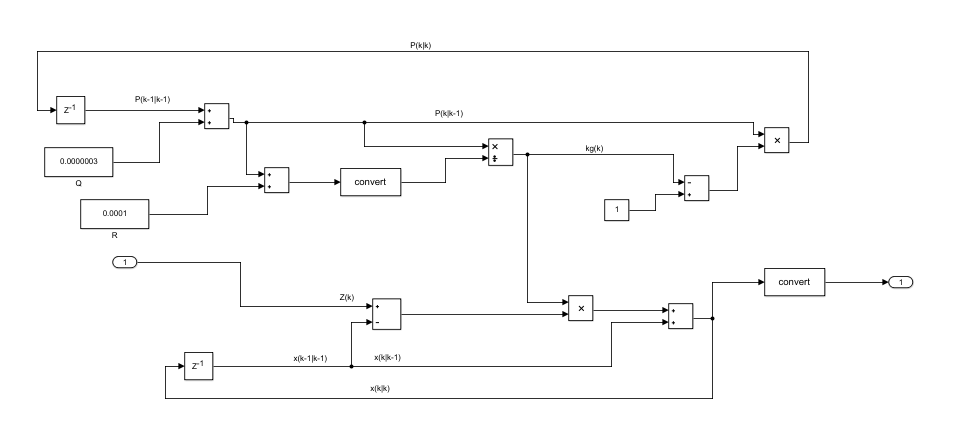
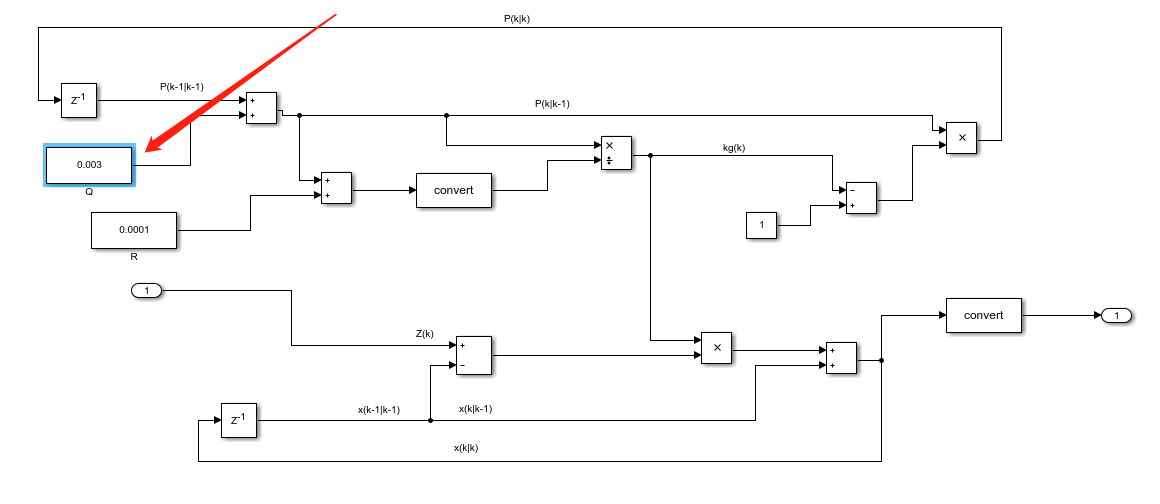
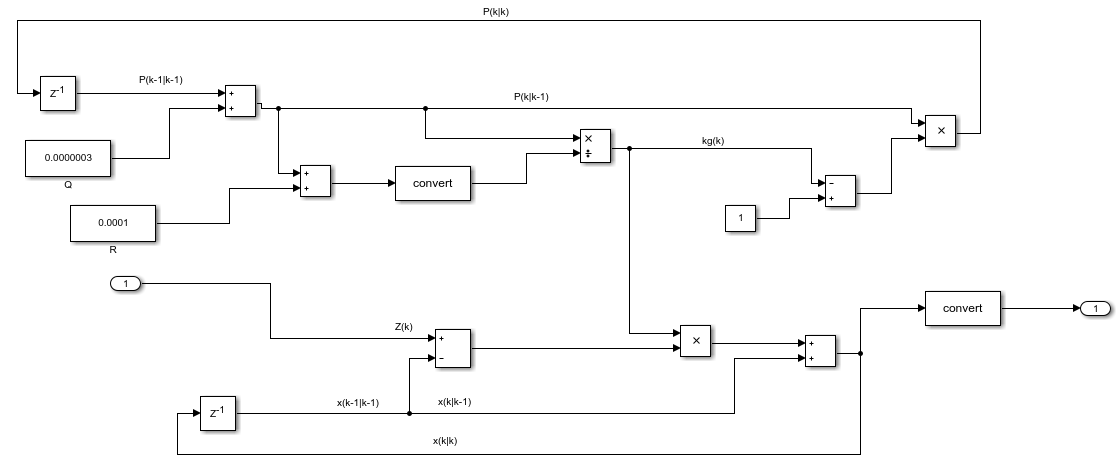
基于上述的卡尔曼滤波搭建simulink仿真模型
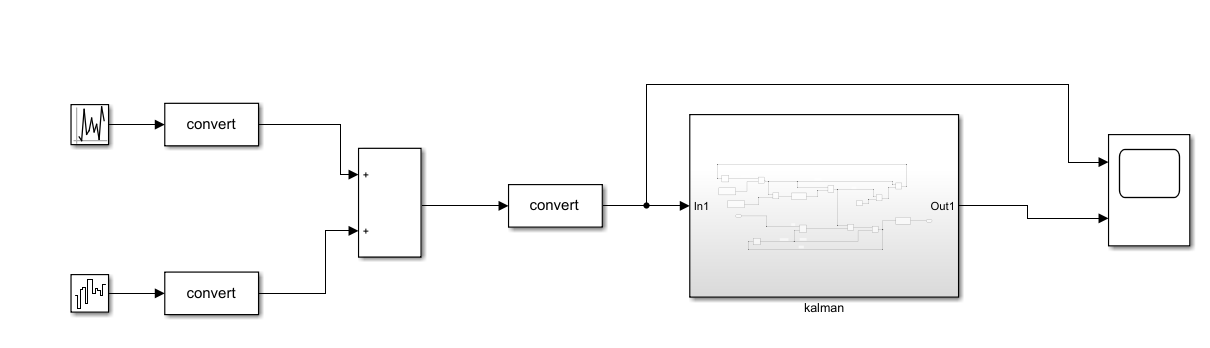
下面对上述simulink模型进行进一步封装
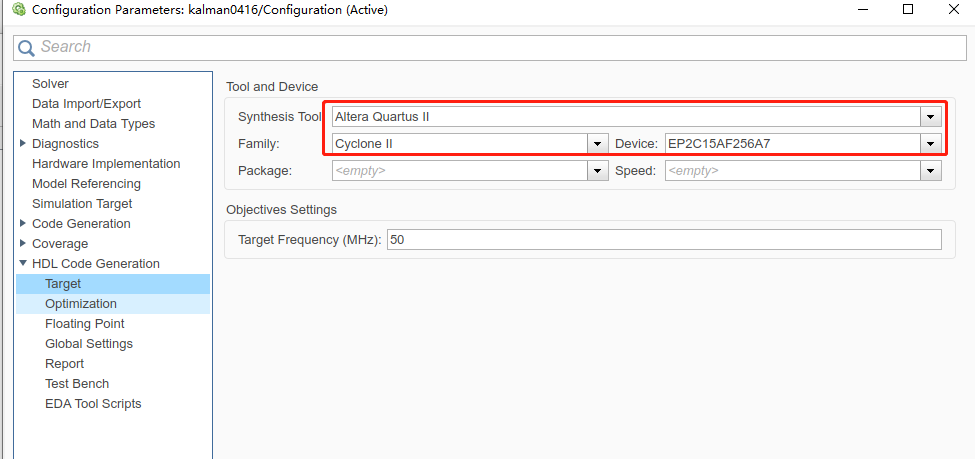
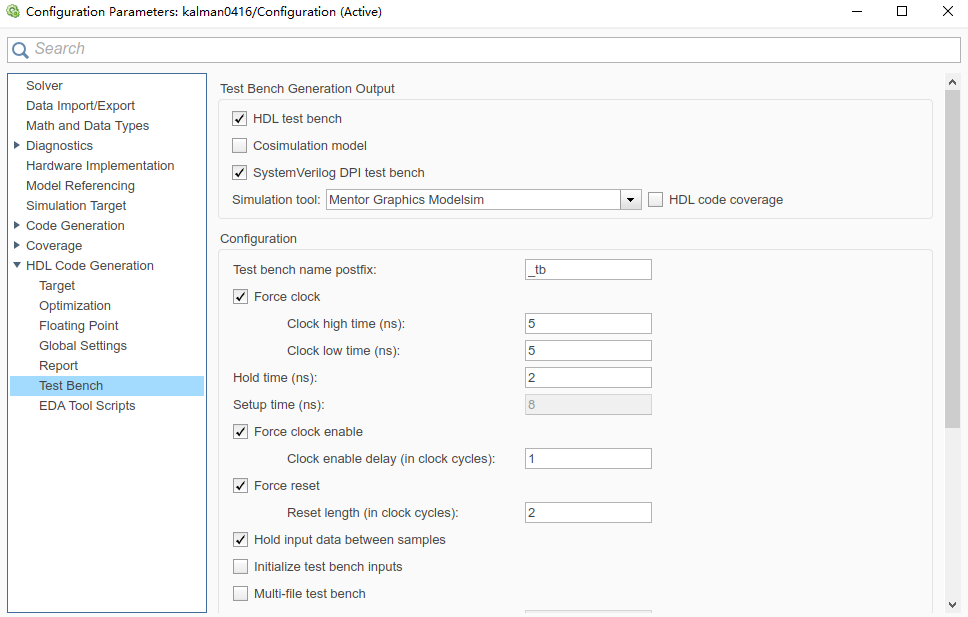
具体设置kalman模块的Hdl Coder参数模式
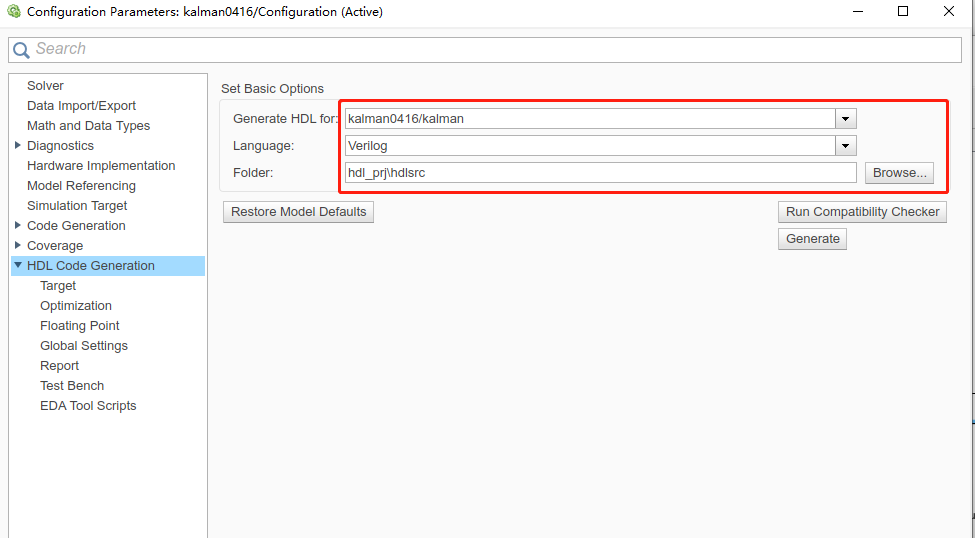
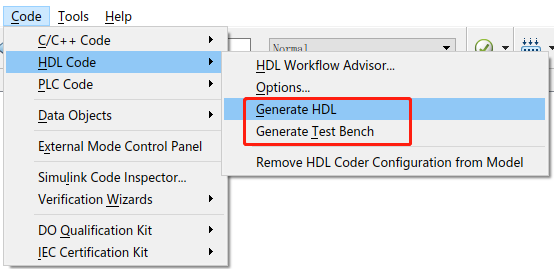
最后点击“Generate HDL”与“Generate Test Bench”,生成verilog源程序与测试代码
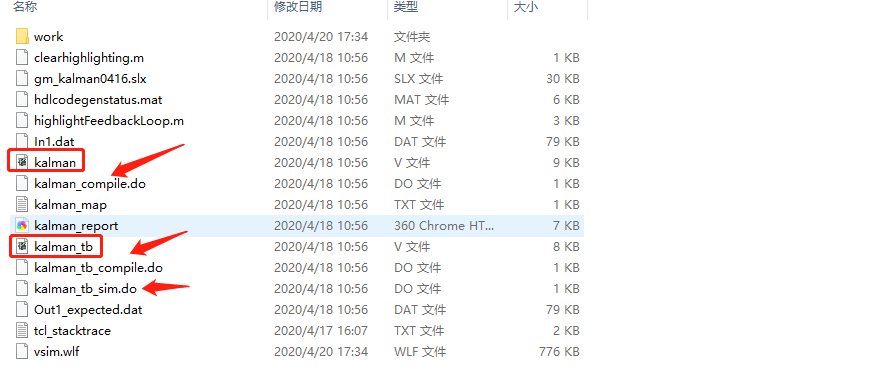
要对执行文件进行仿真,只需要在modelsim命令框自动执行以下后缀文件即可“kalman_compile.do”,"kalman_tb_compile.do","kalman_tb_sim.do"即可。
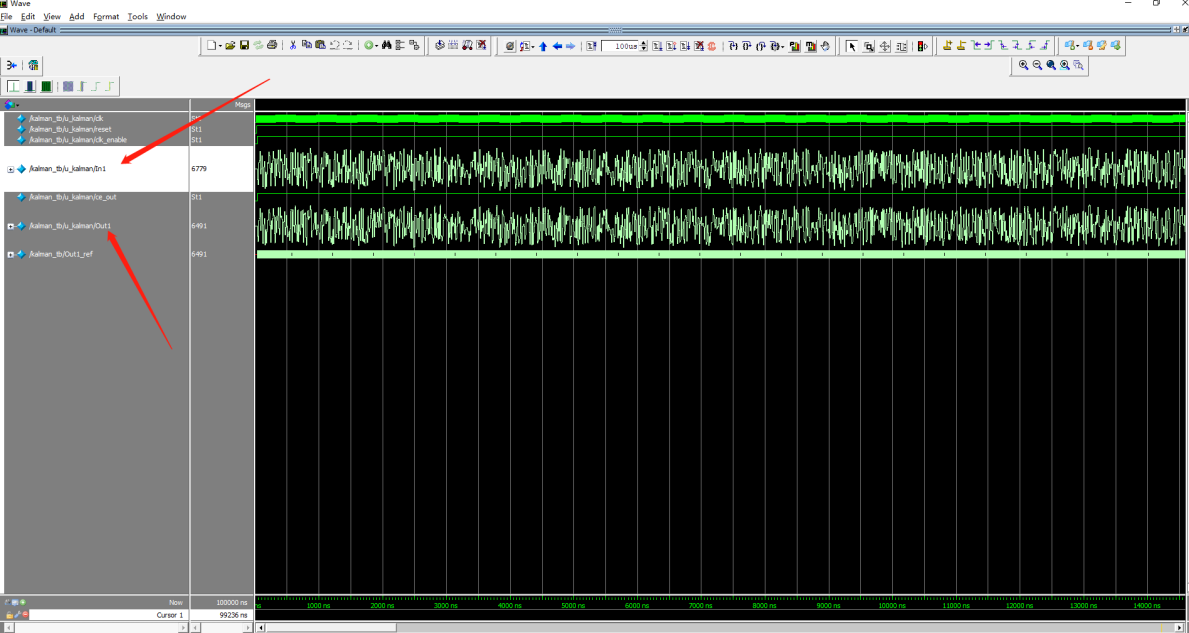
下面进行卡拉曼滤波效果展示:
结果展示:
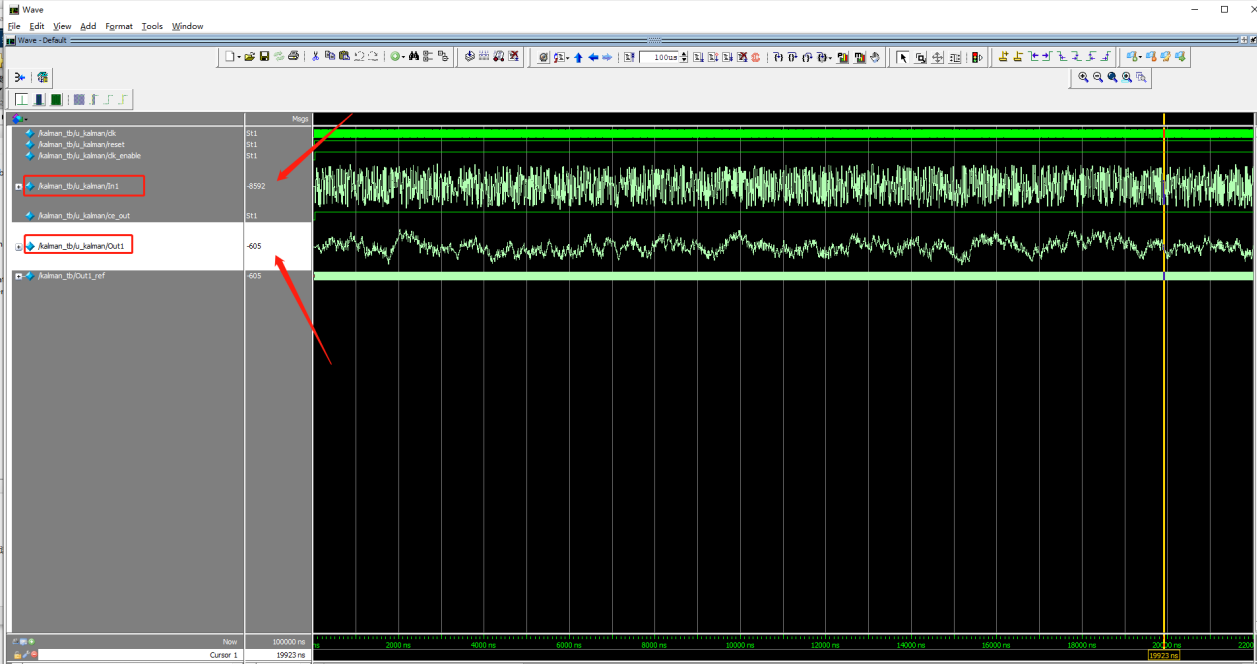
结果展示:
基于Hdl Coder实现卡尔曼滤波算法的更多相关文章
- Google Cardboard的九轴融合算法——基于李群的扩展卡尔曼滤波
Google Cardboard的九轴融合算法 --基于李群的扩展卡尔曼滤波 极品巧克力 前言 九轴融合算法是指通过融合IMU中的加速度计(三轴).陀螺仪(三轴).磁场计(三轴),来获取物体姿态的方法 ...
- 基于FPGA的腐蚀膨胀算法实现
本篇文章我要写的是基于的腐蚀膨胀算法实现,腐蚀膨胀是形态学图像处理的基础,,腐蚀在二值图像的基础上做"收缩"或"细化"操作,膨胀在二值图像的基础上做" ...
- 基于MATLAB的腐蚀膨胀算法实现
本篇文章要分享的是基于MATLAB的腐蚀膨胀算法实现,腐蚀膨胀是形态学图像处理的基础,腐蚀在二值图像的基础上做“收缩”或“细化”操作,膨胀在二值图像的基础上做“加长”或“变粗”的操作. 什么是二值图像 ...
- matlab中hdl coder 的使用
今天摸索了一下hdl coder的使用方法,各个步骤主要是照猫画虎,有些地方还是不理解,先总结一下: 1.要想调用quartus或者Xilinx综合布局布线需要先设置,设置的方法有两种,命令窗口输入 ...
- 基于视觉信息的网页分块算法(VIPS) - yysdsyl的专栏 - 博客频道 - CSDN.NET
基于视觉信息的网页分块算法(VIPS) - yysdsyl的专栏 - 博客频道 - CSDN.NET 于视觉信息的网页分块算法(VIPS) 2012-07-29 15:22 1233人阅读 评论(1) ...
- VIPS:基于视觉的页面分割算法[微软下一代搜索引擎核心分页算法]
VIPS:基于视觉的页面分割算法[微软下一代搜索引擎核心分页算法] - tingya的专栏 - 博客频道 - CSDN.NET VIPS:基于视觉的页面分割算法[微软下一代搜索引擎核心分页算法] 分类 ...
- 基于FPGA的肤色识别算法实现
大家好,给大家介绍一下,这是基于FPGA的肤色识别算法实现. 我们今天这篇文章有两个内容一是实现基于FPGA的彩色图片转灰度实现,然后在这个基础上实现基于FPGA的肤色检测算法实现. 将彩色图像转化为 ...
- 基于MATLAB的人脸识别算法的研究
基于MATLAB的人脸识别算法的研究 作者:lee神 现如今机器视觉越来越盛行,从智能交通系统的车辆识别,车牌识别到交通标牌的识别:从智能手机的人脸识别的性别识别:如今无人驾驶汽车更是应用了大量的机器 ...
- 基于RNN的音频降噪算法 (附完整C代码)
前几天无意间看到一个项目rnnoise. 项目地址: https://github.com/xiph/rnnoise 基于RNN的音频降噪算法. 采用的是 GRU/LSTM 模型. 阅读下训练代码,可 ...
随机推荐
- POJ3460 Booksort
飞来山上千寻塔,闻说鸡鸣见日升. 不畏浮云遮望眼,自缘身在最高层.--王安石 题目:Booksort 网址:http://poj.org/problem?id=3460 Description The ...
- jenkins及Maven介绍
一.环境介绍 随着软件开发需求及复杂度的不断提高,团队开发成员之间如何更好地协同工作以确保软件开发的质量已经慢慢成为开发过程中不可回避的问题.Jenkins自动化部署可以解决集成.测试.部署等重复性的 ...
- lua 发送http请求
lua发送http请求,luajit默认没有http.lua库,需要下载并存放到luajit对应目录. 一.下载http.lua和http_headers.lua库 参考:https://www.zi ...
- 数据结构--栈(附上STL栈)
定义: 栈是一种只能在某一端插入和删除数据的特殊线性表.他按照先进先出的原则存储数据,先进的数据被压入栈底,最后进入的数据在栈顶,需要读数据的时候从栈顶开始弹出数据(最后被压入栈的,最先弹出).因此栈 ...
- Nmon 的安装及使用
一.安装 Nmon 1.下载地址:http://nmon.sourceforge.net/pmwiki.php?n=Site.Download 2.下载对应系统的 nomn 工具(我用 centos6 ...
- Spring 注解注入—@Qualifier 注释
当创建多个具有相同类型的 bean 时,并且想要用一个属性只为它们其中的一个进行装配,在这种情况下,你可以使用 @Qualifier 注释和 @Autowired 注释通过指定哪一个真正的 bean ...
- C++11的mutex和lock_guard,muduo的MutexLock 与MutexLockGuard
互斥锁是用来保护一段临界区的,它可以保证某段时间内只有一个线程在执行一段代码或者访问某个资源. C++11的mutex和lock_guard C++11新增了mutex,使用方法和linux底下的常用 ...
- IOS抓取与反抓取
目录 IOS抓取基础知识 IOS抓取方式 iOS破解 模拟器 黑雷苹果模拟器 介绍 局限 改机软件 常用改机软件 检测 可更改属性 注入与Hook(越狱下实现作弊) 注入方式 Hook方式 重打包(非 ...
- Java——Spring常用jar包功能详解
很多小伙伴包括我自己,在使用spring的时候导入了一堆jar包,但是并不明白每个jar的用途,使用spring的不同功能时也不知该导入哪个jar包,今天记录一下spring各个jar包的含义,供大家 ...
- 这是一篇每个人都能读懂的最小生成树文章(Kruskal)
本文始发于个人公众号:TechFlow,原创不易,求个关注 今天是算法和数据结构专题的第19篇文章,我们一起来看看最小生成树. 我们先不讲算法的原理,也不讲一些七七八八的概念,因为对于初学者来说,看到 ...