STM32串口USART1的使用方法和程序
通用同步异步收发器(USART)提供了一种灵活的方法来与使用工业标准NR 异步串行数据格式的外部设备之间进行全双工数据交换。 USART利用分数波特率发生器提供宽范围的波特率选择,支持同步单向通信和半双工单线通信。
1、STM32固件库使用外围设备的主要思路
在STM32中,外围设备的配置思路比较固定。首先是使能相关的时钟,一方面是设备本身的时钟,另一方面如果设备通过IO口输出还需要使能IO口的时钟;最后如果对应的IO口是复用功能的IO口,则还必须使能AFIO的时钟。
其次是配置GPIO,GPIO的各种属性由硬件手册的AFIO一章详细规定,较为简单。
接着相关设备需要如果需要使用中断功能,必须先配置中断优先级,后文详述。
然后是配置外围设备的相关属性,视具体设备而定,如果设备需要使用中断方式,必须使能相应设备的中断,之后需要使能相关设备。
最后如果设备使用了中断功能,则还需要填写相应的中断服务程序,在服务程序中进行相应操作。
2、UART的配置步骤(查询方式)
2.1、打开时钟
由于UART的TX和RX和AFIO都挂在APB2桥上,因此采用固件库函数RCC_APB2PeriphClockCmd()进行初始化。UARTx需要分情况讨论,如果是UART1,则挂在APB2桥上,因此采用RCC_APB2PeriphClockCmd()进行初始化,其余的UART2~5均挂在APB1上。
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
2.2、GPIO初始化
GPIO的属性包含在结构体GPIO_InitTypeDef,其中对于TX引脚,GPIO_Mode字段设置为GPIO_Mode_AF_PP(复用推挽输出),GPIO_Speed切换速率设置为GPIO_Speed_50MHz;对于RX引脚,GPIO_Mode字段设置为GPIO_Mode_IN_FLOATING(浮空输入),不需要设置切换速率。最后通过GPIO_Init()使能IO口。
以下是GPIO设置的实例代码:
GPIO_InitTypeDef GPIO_InitStructure;
//USART1 Tx(PA.09)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1 Rx(PA.10)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
2.3、配置UART相关属性
通过结构体USART_InitTypeDef来确定。UART模式下的字段如下
USART_BaudRate:波特率,视具体设备而定
USART_WordLength:字长
USART_StopBits:停止位
USART_Parity:校验方式
USART_HardwareFlowControl:硬件流控制
USART_Mode:单/双工
最后设置。实例代码为:
//USART1配置
USART_InitTypeDef USART_InitStructure; USART_InitStructure.USART_BaudRate = ;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
别忘了最后要使用USART_Cmd()来启动设备UART1。
2.4、重定向print()函数。
int fputc(int ch,FILE *f)
{
USART1->SR; //USART_GetFlagStatus(USART1, USART_FLAG_TC) 解决第一个字符发送失败的问题
//一个一个发送字符
USART_SendData(USART1, (unsigned char) ch);
//等待发送完成
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET); return(ch);
}
最后通过主函数直接输出即可。
int main(void)
{
// USART1 config 9600 8-N-1
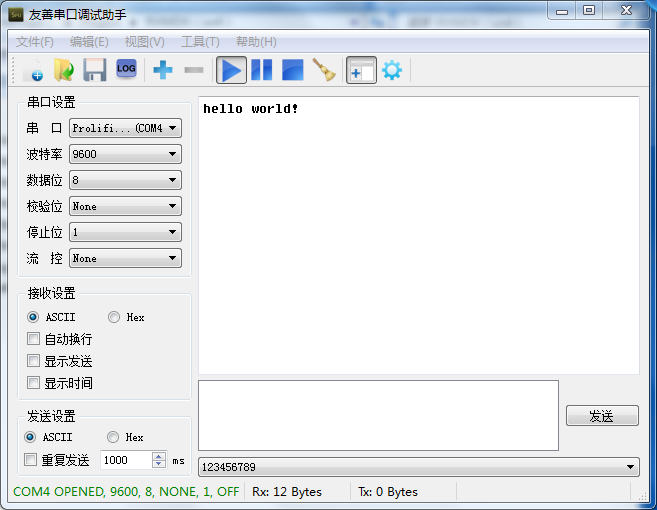
USART1_Config(); printf("hello world!");
}
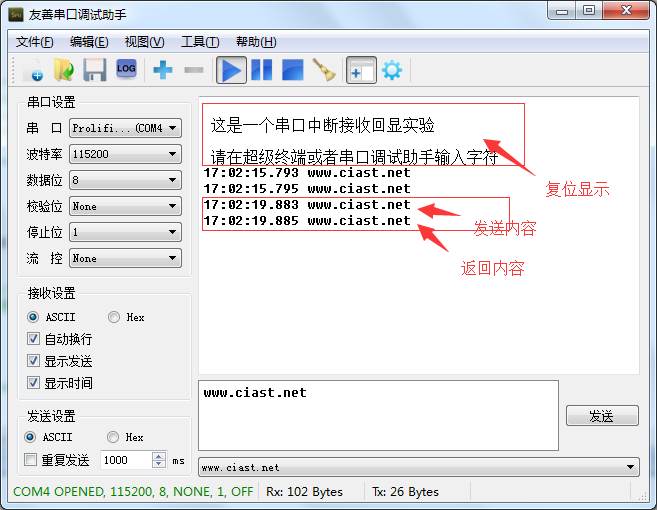
3、UART的配置步骤(中断方式)
打开时钟、GPIO初始化、配置UART相关属性、重定向print()函数 与上面的相同。
3.1、中断优先级的配置
这是STM32比较奇怪的地方,在只有一个中断的情况下,仍然需要配置优先级,其作用是使能某条中断的触发通道。STM32的中断有至多两个层次,分别是先占优先级和从优先级,而整个优先级设置参数的长度为4位,因此需要首先划分先占优先级位数和从优先级位数,通过NVIC_PriorityGroupConfig()实现;
特定设备的中断优先级NVIC的属性包含在结构体NVIC_InitTypeDef中,其中字段NVIC_IRQChannel包含了设备的中断向量,保存在启动代码中;字段NVIC_IRQChannelPreemptionPriority为主优先级,NVIC_IRQChannelSubPriority为从优先级,取值的范围应根据位数划分的情况而定;最后NVIC_IRQChannelCmd字段是是否使能,一般定位ENABLE。最后通过NVIC_Init()来使能这一中断向量。实例代码如下:
//配置UART1接收中断
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure the NVIC Preemption Priority Bits */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); /* Enable the USARTy Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = ;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = ;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
3.2、中断的服务程序的设计
目前使用了UART的两个中断USART_IT_RXNE(接收缓存补空中断)和USART_IT_TXE(发送缓存空中断),前一个中断保证了一旦有数据接收到就进入中断以接收特定长度的数据,后一个中断表示一旦发完一个数据就进入中断函数,保证连续发送一段数据。一个设备的所有中断都包含在一个中断服务程序中,因此必须首先分清楚这次响应的是哪一个中断,使用USART_GetITStatus()函数确定;采用USART_ReceiveData()函数接收一个字节数据,采用USART_SendData()函数发送一个字节数据,当关闭中断时采用USART_ITConfig()失能响应的中断。实例程序:
void USART1_IRQHandler(void)
{
uint8_t ch; if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
//ch = USART1->DR;
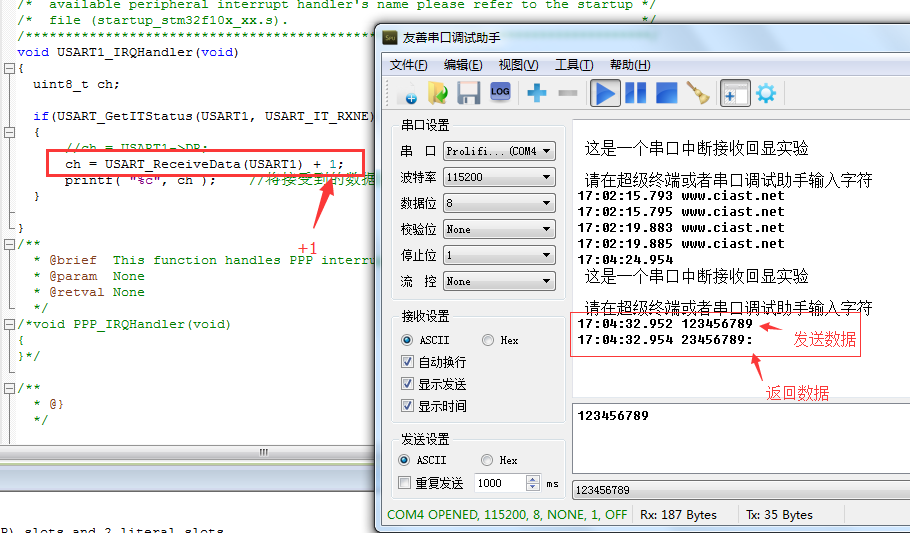
ch = USART_ReceiveData(USART1); //接受数据
printf( "%c", ch ); //返回打印
} }
3.3、接收数据函数:
//重定向scanf函数到USART1
int fgetc(FILE *f)
{
/*等待串口1输入数据*/
while (USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET); return (int)USART_ReceiveData(USART1);
}
4、 STM32串口在首次发送字符的时候,首字符丢失解决办法
网上关于发送字符的代码大多如下:
USART_SendData(USART1, (uint8_t)ch);
while( USART_GetFlagStatus(USART1, USART_FLAG_TC) != SET);
其实咋一看是说的通的,但是在仔细看手册的时候发现 TC 和 TXE 标志位在复位的时候被置1 ,这样第一次while循环就是没有用的。这样导致了首次第一个字符还没有被输出,就被后面的字符覆盖掉,造成实际看到的丢失现象。解决办法就很简单:在前面加上一句 USART1->SR;
具体代码如下:
USART1->SR;
USART_SendData(USART1, (uint8_t)ch);
while( USART_GetFlagStatus(USART1, USART_FLAG_TC) != SET);
下面我来说说原因: 第一句读取SR寄存器,第二句写DR寄存器 刚好清除了TC标志位 。第一次while循环就起作用了。
也可将USART1->SR;替换为USART_GetFlagStatus(USART1, USART_FLAG_TC)
本实验所有程序《STM32串口USART1的查询和中断方式程序》
补充:一直有一个疑问是关于接受和发送数据的问题:对于“hello”这样的字符串是一个一个接受还是整个接受显示,下面的实验可以验证是一个一个进行的。
[完] 选自:http://www.ciast.net/post/2015119.html
STM32串口USART1的使用方法和程序的更多相关文章
- STM32串口USART的使用方法和程序
通用同步异步收发器(USART)提供了一种灵活的方法来与使用工业标准NR 异步串行数据格式的外部设备之间进行全双工数据交换. USART利用分数波特率发生器提供宽范围的波特率选择,支持同步单向通信和半 ...
- STM32串口USART1的使用方法
前言: 通用同步异步收发器(USART)提供了一种灵活的方法来与使用工业标准NR 异步串行数据格式的外部设备之间进行全双工数据交换. USART利用分数波特率发生器提供宽范围的 波特率选择,支持同 ...
- STM32串口DMA超时接收方法,可大大节约CPU时间
//超时时间定义#define UART1_TimeoutComp 2 //20ms#define UART2_TimeoutComp 10 //100ms#defin ...
- STM32 HAL库利用DMA实现串口不定长度接收方法
参考:https://blog.csdn.net/u014470361/article/details/79206352 我这里使用的芯片是 F1 系列的,主要是利用 DMA 数据传输方式实现的,在配 ...
- STM32串口通信配置(USART1+USART2+USART3+UART4) (转)
一.串口一的配置(初始化+中断配置+中断接收函数) 1 /*====================================================================== ...
- STM32 串口功能 库函数 详解和DMA 串口高级运用(转载)
数据传输时要从支持那些相关的标准?传输的速度?什么时候开始?什么时候结束?传输的内容?怎样防止通信出错?数据量大的时候怎么弄?硬件怎么连接出发,当然对于stm32还要熟悉库函数的功能 具起来rs232 ...
- Stm32串口通信(USART)
Stm32串口通信(UART) 串口通信的分类 串口通信三种传递方式 串口通信的通信方式 串行通信的方式: 异步通信:它用一个起始位表示字符的开始,用停止位表示字符的结束.其每帧的格式如下: 在一帧格 ...
- STM32串口中断的一些资料
在研究STM32串口接收发送中断的时候找到不少不错的资料,现在备份在这里.以供自己查阅,以及方便其他人. TC ====TXE 顺便预告下最近会写个有关串口处理数据的帖子,从查询和中断方面以及数据处理 ...
- stm32串口之存储与解析
最近在做一个小项目,需要用stm32串口接受Arduino发送的一个不定长的数据,并且解析数据,执行其中的命令:秉着不在中断中做过多任务的思想,我们将从串口中接受到的字符放到一个数组当中. 定义数组 ...
随机推荐
- 【Python—参数】*arg与**kwargs参数的用法
在python中,这两个是python中的可变参数,*arg表示任意多个无名参数,类型为tuple;**kwargs表示关键字参数,为dict. # *允许你传入0个或任意个参数,这些可变参数在函数调 ...
- Oracle-常见的错误
1.见下面的例子 create or replace procedure p_qr_stu_cid(s_id in number, c_id out number) as begin select t ...
- spring-第十一篇之SpEL表达式
1.spring表达式语言,简称SpEL表达式语言
- spring中bean的构造函数,Autowired(Value)注入与@PostConstruct调用顺序
版权声明:本文为博主原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明. 本文链接:https://blog.csdn.net/yyysylvia/article/deta ...
- 关于GeneXus中的ForeachCommand命令
首先作为我们开发过程中必不可少的命令For Each 有着无与伦比的重要性 但是我们从Wiki上得知 我们用到的可能只是它一丢丢的能力并没有全部使用出来. 所以 这篇文档将记 ...
- vue不是内部或外部命令的解决方法
1.在nodejs的安装目录下,找到vue.cmd,将此路径加到环境变量中,我是通过nvm管理node版本的,路径是C:\Users\hy\AppData\Roaming\nvm\v6.10.0,关闭 ...
- BZOJ-3143/洛谷3232 游走(HNOI2013)概率DP
题意:给定n个点m条边.每条边的权值还没决定,权值大小为从1到m.从1出发每次等概率选一条出边向下走,直到走到n点停止,路径代价就是边权总和.由你来决定边权来使得上诉路径代价期望值最小. 解法:点这么 ...
- 系统调用system_call处理过程
原创作品转载请注明出处 + <Linux内核分析>MOOC课程http://mooc.study.163.com/course/USTC-1000029000 作者:严哲璟 linux的系 ...
- QT + openssl + VS2015静态编译
从http://slproweb.com/products/Win32OpenSSL.html下载已经编译好的openssl,一路next 我将OpenSSL-Win32\lib\VC目录下的libe ...
- Vue-鼠标按键修饰符
left .right .middle 这些修饰符会限制处理函数仅响应特定的鼠标按钮. 如下例子 <div id="app"> <input type=" ...