ROS系统MoveIt玩转双臂机器人系列(一)
注:本篇博文全部源码下载地址为:Git Repo。
1. 下载到本地后解压到当前文件夹然后运行:catkin_make 编译。
2. 源码是在 Ubuntu14.04 + Indigo 环境下编写。
一、ROS系统的MoveIt模块简介
机器人操作系统ROS目前最受关注的两个模块是导航(Navigation)和机械臂控制(MoveIt!),其中,机械臂控制模块(后面简称MoveIt)可以让用户快速建立机械臂模型并实现机械臂的控制(包括建模、运动学求解、运动规划、避障等),后续我将分几篇博客分别介绍如何一步步使用MoveIt控制自己的机械臂,算是对以前的学习内容的记录和分享。
关于MoveIt最全面的讲解可以参考MoveIt官方网站,推荐大家多参考官方文档和例程,这里的博文系列权当简介和入门。
如果用几个特点来概括MoveIt,主要有:
- 它是属于ROS系统的一部分,用于控制多关节机械臂;
- 提供了一系列成熟的插件和工具,可以实现机械臂控制的快速配置;
- 封装了大量API,方便用户在MoveIt模块上进行二次开发,进而做出更多有意思的应用。
这里借用官方经典图例做简单说明,如下如:

MoveIt结构图
上图可以看出:
1.MoveIt 的核心节点(node)为move_group,外围的几个部分分别为:ROS Param Server, Robot Controllers, Robot 3D Sensors, User Interface, Robot Sensors,其中:
- ROS Param Server:这部分载入的是用户定义的模型文件(xacro或urdf)和一些配置文件。(重要)
- Robot Controllers: 这部分可以看做是和真正的机器人部分(硬件控制接口)打交道的部分,即运动规划的数据由此发给机器人驱动部分,后续会详细讲解。(重要)
- Robot 3D Sensors: 这部分作用是载入RGB-D相机或激光雷达等获得的点云数据用于机械手的抓取或避障等。
- User Interface: 这部分是用户接口,MoveIt提供一系列的API供用户完成自定义的功能,这里主要。(重要)
- Robot Sensors: 这部分是接收机械臂的传感器数据,然后预估出机器人的状态并发布。
二、MoveIt的安装(Ubuntu14.04,Indigo)
首先确保你的Linux上正确安装了ROS系统,安装步骤参考:http://wiki.ros.org/indigo/Installation/Ubuntu。然后安装moveit,如果不想挑战源码编译,MoveIt可以用apt-get快速安装,只需要输入:
$ sudo apt-get install ros-indigo-moveit-full
三、本系列博文所用双臂机器人简介
本系列博文将以一个双臂机器人为例,详细讲解基于MoveIt的使用方法,我为这个双臂机器人取名为:rob,并在Solidworks中简单绘制了该机器人的三维模型,结构示意图如下:
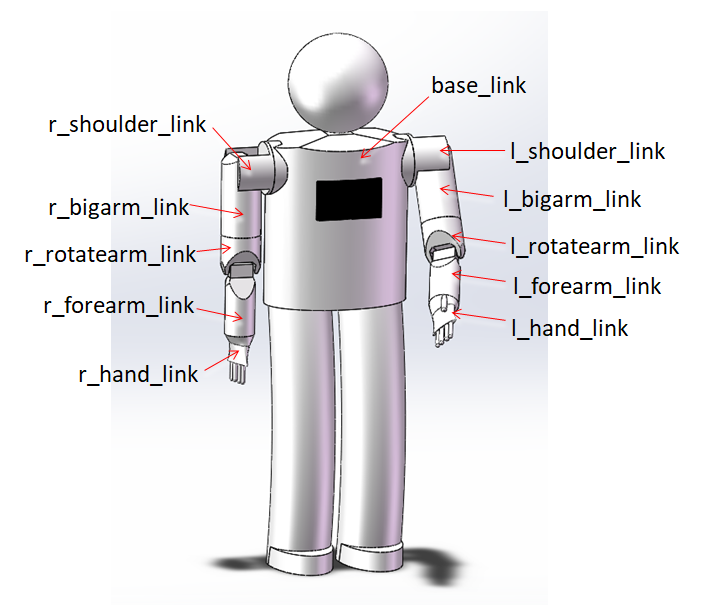
Rob结构示意图
Rob包含两个手臂,左右对称布局,每个手臂包含5个自由度,关节情况如下图所示。
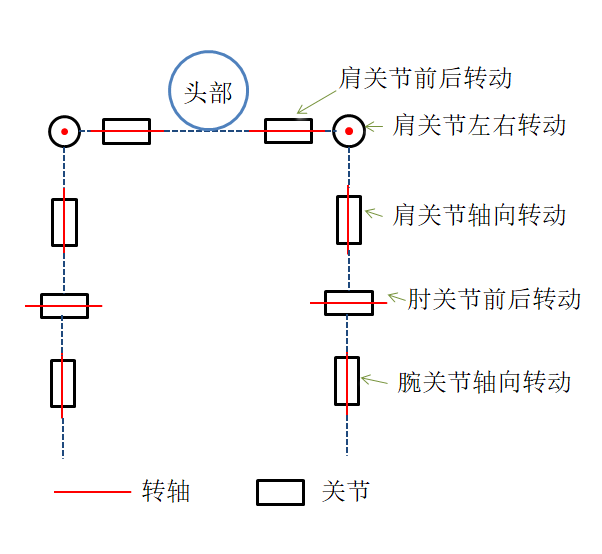
关节分布情况示意图
这种关节分布是仿人形的双臂机器人常用的手臂设置形式,但这种结构并不能完全覆盖人手臂所有的自由度(人的手臂包含7个自由度),但用于说明 MoveIt 的使用已经足够了。此外,各个关节的自由度范围如下表所示。
| 关节 | 肩关节前后转动(左) | 肩关节左右转动(左) | 肩关节轴向转动(左) | 肘关节前后转动(左) | 腕关节轴向转动(左) | 肩关节前后转动(右) | 肩关节左右转动(右) | 肩关节轴向转动(右) | 肘关节前后转动(右) | 腕关节轴向转动(右) |
| 范围(度°) | -25~175 | 0~60 | -80~80 | 0~90 | -80~80 | -25~175 | 0~60 | -80~80 | 0~90 | -80~80 |
四、机器人的ROS模型建立
这个系列主要介绍机器人ROS模型的建立方法,ROS系统带来的好处之一就是:我们无需自己建立复杂的数学模型来描述自己的机器人几何尺寸、运动学和动力学等,只需要用它提供的模型描述方法即可实现快速建模。
ROS系统的模型描述方法主要有两种格式: URDF 和 XACRO。
1. 语法简练。采用编程话的脚本语言格式,可以定义变量、常量、引入数学表达式等,极易上手。
2. 方便复用。它可以进行一系列的宏定义,并且可以包含其他.xacro文件。
下面,开始用xacro文件建立Rob的机器人模型,完整的源代码可以在:git上获取(git建模源码),下文会截取一部分代码做简要说明。
1. 第一部分是文件的头和一些宏定义,robot name我们可以自己随便定义,然后分别给出了几组颜色和常数的定义,最后给出了关节传动部分的宏定义。
<?xml version="1.0"?>
<robot name="rob_robot" xmlns:xacro="http://ros.org/wiki/xacro"> <!-- Include materials -->
<material name="Black">
<color rgba="0.0 0.0 0.0 1.0"/>
</material> <material name="White">
<color rgba="1.0 1.0 1.0 1.0"/>
</material>
常量的定义方法如下,在引用这里定义的常量的时候,用${XX},例如在如果在下面的代码中想引用M_PI,只需要用:${M_PI} 即可。
<!-- Constants -->
<property name="deg_to_rad" value="0.01745329251994329577"/>
<property name="M_PI" value="3.14159"/>
关节的传动参数宏定义方法如下,xacro:macro name 定义了本宏的名称,这个名称由用户定义,后续引用该宏的时候就是根据名字来的,具体如何操作参考下文介绍或git上的源代码,注意,这里宏定义内部的一些具体数值仅为说明而存在,具体的机器人关节应该是不一样的。
<!-- transmission block macro definition -->
<xacro:macro name="transmission_block" params="joint_name">
<transmission name="tran1">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${joint_name}">
<hardwareInterface>PositionJointInterface</hardwareInterface>
</joint>
<actuator name="motor1">
<hardwareInterface>PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
2,base_link的定义。
base_link是所有的其他关节的基础,也就是基坐标系所在的link,这里他的几何图形我们直接引用他的dae文件,至于如何用Solidworks绘制模型然后制作成dae文件,后续找机会专门写一篇博客进行介绍,下面的gazebo句段是为了我们的模型在gazebo环境中仿真用的,注意,base_link 只是定义了“机械臂的基座” 它本身是不包含 joint 的。
<!-- BASE LINK AND -->
<link name="base_link">
<visual>
<!-- <origin xyz="-0.22 -0.15 0.00" rpy="0 0 0" /> -->
<origin xyz="0.1 -0.11 0.13" rpy="0 0 1.570796" />
<geometry>
<mesh filename="package://rob_description/meshes/body_link_humanoid.dae"/>
</geometry>
<material name="green" />
</visual> <collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" /> <!-- -->
<geometry>
<mesh filename="package://rob_description/meshes/body_link_humanoid.dae"/>
</geometry>
</collision>
</link> <gazebo reference="base_link">
<material>Gazebo/green</material>
</gazebo>
3. 其他关节的定义。
至于其他关节的定义,一个 Link 就对应一个 Joint ,示例如下,这里定义的是 l_shoulder_joint 和 l_shoulder_link。在Joint 的定义中,有一个limit 的程序段,这里规定的是关节的力限制、速度限制和关节运动范围限制,速度限制的单位是m/s(移动关节)或rad/s(转动关节),详细的说面看:这里。
代码中间: <xacro: ...../> 就是引用上文中我们定义的关于传动参数的宏定义。
如果在xacro 代码中想用数学表达式,使用的格式是:${ 数学表达式 } ,如下面代码中所示。
其余关节的定义详见源代码。
<!-- left shoulder link and joint -->
<joint name="l_shoulder_joint" type="revolute">
<parent link="base_link"/>
<child link="l_shoulder_link"/>
<origin xyz="0 0.11 0.74" rpy="0 0 3.14159" />
<axis xyz="0 1 0" />
<limit effort="300" velocity="${0.2*0.6981}" lower="-0.43633" upper="3.0543"/><!-- (-25 +175)=(-25 175) -->
<!-- velocity: m/s for prismatic, rad/s for revolute -->
<dynamics damping="50" friction="1"/>
</joint> <xacro:transmission_block joint_name="l_shoulder_joint"/> <link name="l_shoulder_link">
<visual>
<origin xyz="-0.04 0.02 0.04" rpy="1.5708 1.5708 0" />
<geometry>
<mesh filename="package://rob_description/meshes/l_shoulder_link.dae"/>
</geometry>
<material name="green" />
</visual> <collision>
<origin xyz="-0.04 0.02 0.04" rpy="1.5708 1.5708 0" />
<geometry>
<mesh filename="package://rob_description/meshes/l_shoulder_link.dae"/>
</geometry>
</collision>>
<xacro:inertial_matrix mass="1"/>
</link> <gazebo reference="l_shoulder_link">
<material>Gazebo/green</material>
</gazebo>
4. 将 XACRO文件转换成 URDF 文件 并检查。
转换的方法很简单,ROS封装了实现方法,我们只需进入xacro 所在的文件夹,然后键入如下命令即可:
rosrun xacro xacro.py rob.xacro > rob.urdf
为了检验我们的模型的准确性,我们进行简单的检查,在同一个目录下输入:
check_urdf rob.urdf
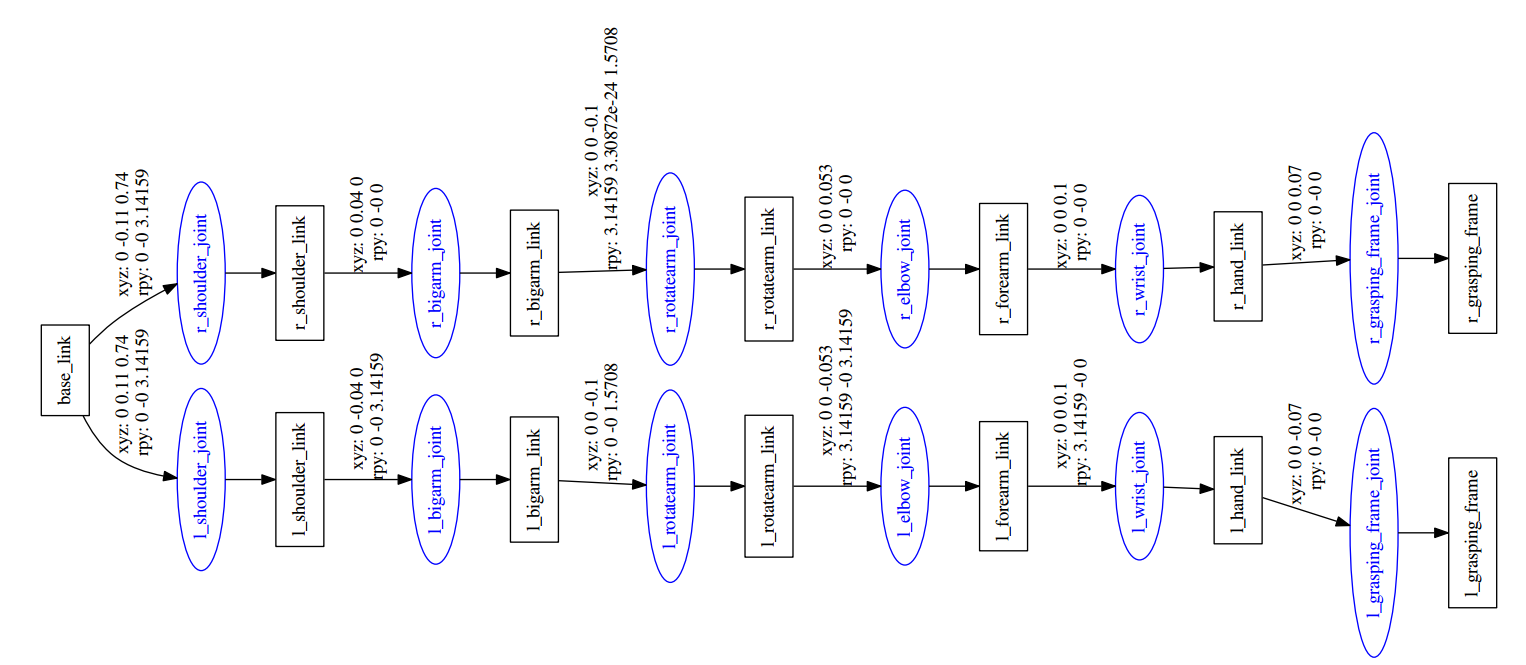
即可得到如下图显示,可以看到双臂的关节链接情况。

为了更直观的观看关节链接情况,我们在同一个目录下输入下面这行命令,就会得到 rob_robot.gv 和 file rob_robot.pdf 两个文件,打开后者如下图所示。
urdf_to_graphiz rob.urdf
5. 在RViz中观看模型。
编写 launch 文件,取名: description.launch ,内容如下:
<launch>
<arg name="model" /> <!-- Parsing xacro and setting robot_description parameter -->
<param name="robot_description" command="$(find xacro)/xacro.py $(find rob_description)/urdf/rob.xacro"/> <!-- Setting gui parameter to true for display joint slider -->
<param name="use_gui" value="true"/> <!-- Starting Joint state publisher node which will publish the joint values -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" /> <!-- Starting robot state publish which will publish tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" /> <!-- Launch visualization in rviz -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find rob_description)/urdf/urdf.rviz" required="true" />
</launch>
输入命令:
roslaunch rob_description description.launch
得到:
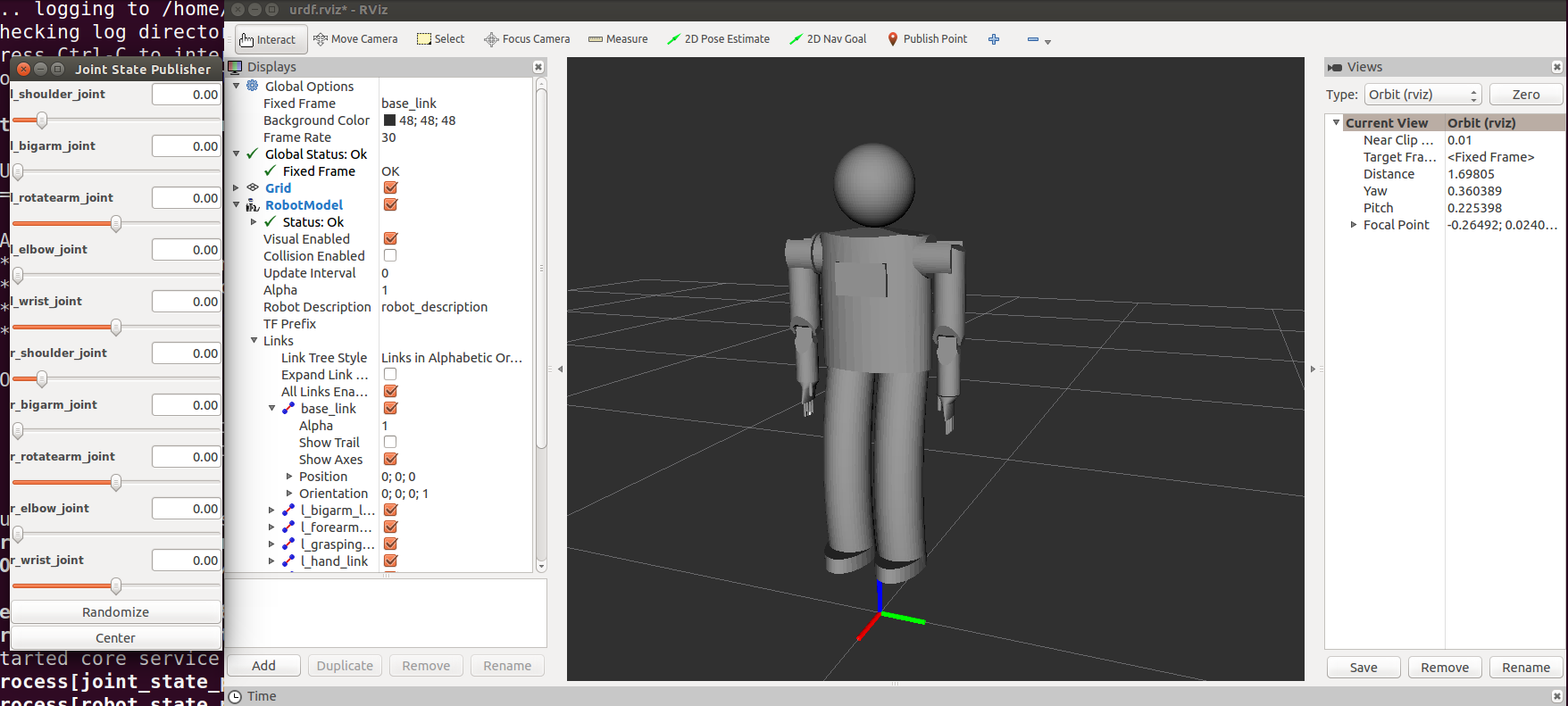
转动每个关节,检查无误后,模型建立完成,下一篇经介绍如何使用 MoveIt 控制 Rob 机器人。
6. Tips 建模常见错误:
问题1:如果在查看模型时发现错误提示:No transform from [xxxx] to [base_link]
解决办法:出现这个错误首先要怀疑是你的xacro描述文件编写的格式出现了错误,如头部多了空格、中间关键字拼写错误等,建议耐下心来逐行逐句检查语法。
问题2: 源码中和xacro文件同一目录的 urdf.rviz 文件是什么作用?
答:所有的 .rviz 文件都是 Rviz 的配置文件,这里我们在launch 文件中制定了他的配置文件,如果不指定Rviz 启动时会读取默认的配置文件,用户可以根据需求启动Rviz后在左上角工具栏上保存自己满意的配置文件。
<-- 本篇完 -->
欢迎留言、私信、邮箱、微信等任何形式的技术交流。
作者信息:
名称:Shawn
邮箱:zhanggx0102@163.com
微信二维码:↓

ROS系统MoveIt玩转双臂机器人系列(一)的更多相关文章
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS机器人程序设计(原书第2版)补充资料 (贰) 第二章 ROS系统架构及概念
ROS机器人程序设计(原书第2版)补充资料 (贰) 第二章 ROS系统架构及概念 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 由于工作事 ...
- ROS机器人程序设计(原书第2版)补充资料 (壹) 第一章 ROS系统入门
ROS机器人程序设计(原书第2版)补充资料 (壹) 第一章 ROS系统入门 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 第一章主要包括R ...
- ROS(indigo)MoveIt!控制ABB RobotStudio 5.6x 6.0x中机器人运动
Gazebo以及相关参考文献,参考: ROS(indigo)ABB机器人MoveIt例子 这里需要配置RobotStudio,请参考ROS官网教程.下面列出要点: window端配置结束后,在Ub ...
- 【探索之路】机器人篇(2)-ROS系统并创建工作空间和项目
在ROS官网,已经给出了详细的教程.下面我就般一下砖,把相应的操作写到这里.官方网址:http://wiki.ros.org/cn/ 安装ROS系统 indigo在ubuntu上的安装教程.官网:ht ...
- 玩转Windows服务系列——Windows服务启动超时时间
最近有客户反映,机房出现断电情况,服务器的系统重新启动后,数据库服务自启动失败.第一次遇到这种情况,为了查看是不是断电情况导致数据库文件损坏,从客户的服务器拿到数据库的日志,进行分析. 数据库工作机制 ...
- 完毕port(CompletionPort)具体解释 - 手把手教你玩转网络编程系列之三
手把手叫你玩转网络编程系列之三 完毕port(Completion Port)具体解释 ...
- ROS学习笔记二:ROS系统架构及概念
本文主要是了解ROS的系统架构.文件夹结构以及工作所需的核心文件. ROS系统架构主要被设计和划分为三部分,每一部分代表一个层级的概念:文件系统级(The filesystem level).计算图级 ...
- ROS系统的安装以及卸载
ROS系统的安装 ROS系统的安装方式有两种,通过软件源和源码编译安装.软件源安装只需要通过简单的命令,因此,我们使用软件源来安装ROS 配置系统软件源 打开Ubuntu软件中心的软件源配置界面,勾选 ...
随机推荐
- vue实现懒加载的几种方法
vue实现惰性加载是基于: 1.ES6的异步机制 components: { comp: (resolve, reject) => {} } 2. webpack的代码分割功能 require. ...
- 使用pm2躺着实现负载均衡
事实上,pm2 是一个带有负载均衡功能的Node应用的进程管理器,Node实现进程管理的库有很多,forever也是其中一个很强大但是也相对较老的进程管理器. 为什么要使用pm2 对于这个问题,先说说 ...
- OpenGL学习笔记:第一个OpenGL程序
OpenGL环境搭建参考博客:VS2015下OpenGL库的配置. #include<GL\glew.h> #include<GLTools.h> #include<GL ...
- Hie with the Pie
Hie with the Pie poj-3311 题目大意:n+1个点,伪旅行商问题. 注释:n<=10. 想法:咳咳,第一道状压dp,下面我来介绍一下状压dp. 所谓dp,就是动态性决策规划 ...
- Bate敏捷冲刺每日报告--day3
1 团队介绍 团队组成: PM:齐爽爽(258) 小组成员:马帅(248),何健(267),蔡凯峰(285) Git链接:https://github.com/WHUSE2017/C-team 2 ...
- 1013团队Beta冲刺day3
项目进展 李明皇 今天解决的进度 完善了程序的运行逻辑(消息提示框等) 明天安排 前后端联动调试 林翔 今天解决的进度 向微信官方申请登录验证session以维护登录态 明天安排 继续完成维护登录态 ...
- 详谈C++虚函数表那回事(一般继承关系)
沿途总是会出现关于C++虚函数表的问题,今天做一总结: 1.什么是虚函数表: 虚函数(Virtual Function)是通过一张虚函数表(Virtual Table)来实现的.简称为V-Table. ...
- logging日志
import logging logging.basicConfig(filename='log.log', format='%(asctime)s - %(name)s - %(levelname) ...
- Python之旅_计算机基础入门
一.计算机基础 1.Python是编程语言 语言:一种事物与另一种事物沟通的介质. 编程语言:程序员与计算机沟通的介质. 什么是编程:程序员用编程语言把自己的逻辑思想下来,编程的结果就是一堆文件. 为 ...
- jupyter notebook下python2和python3共存(Ubuntu)
提示NOTICE 时间:2018/04/06 主题:Ubuntu 下CAFFE框架 主角:Jupyter Notebook 简介: Jupyter Notebook(此前被称为 IPython not ...