APM飞控的使用心得
硬件资源:APM,F450四轴机架,大疆电调和电机,富斯i6控和接收机。
刚开始的步骤都是大同小异,首先可以按照这个链接上面的步骤一步步的执行:http://tieba.baidu.com/p/2974250475
当然,很多人可能会看到泡泡老师的教学视屏,但是他使用的是天地飞的控,对于富斯的控网上资料就比较少了。但是还是很少,这里还有一个:https://tieba.baidu.com/p/4524252944?red_tag=1024383346
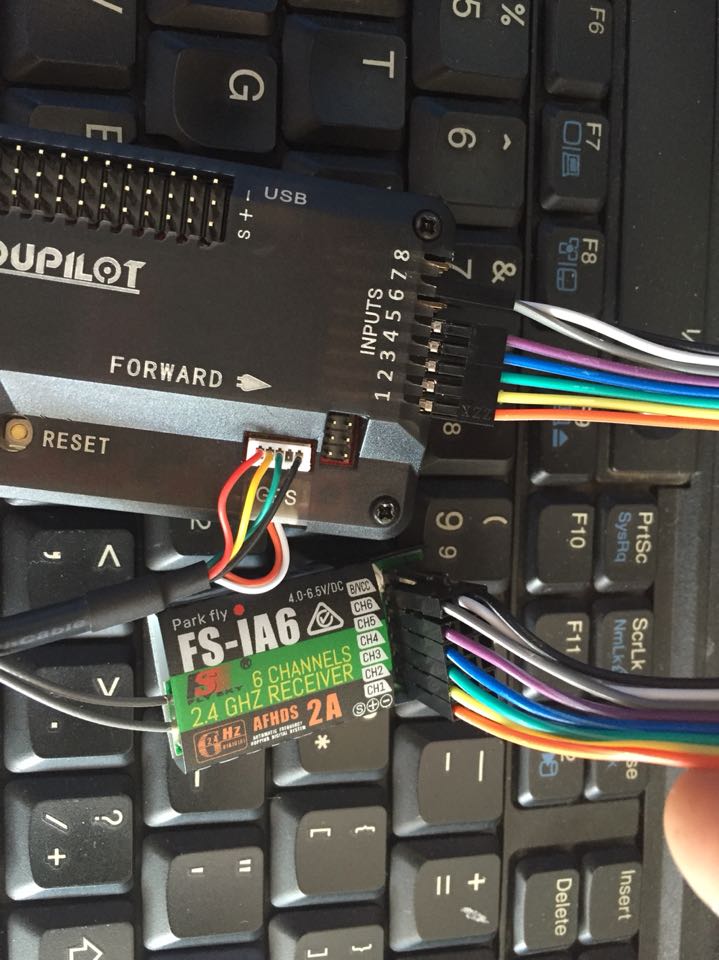
这里 是连接 示意图:
在执行上面的步骤的时候每个人都遇到各种各样的的问题。我就出现了很多。有时候地面站Mission Planner会出问题,就是无法从网络上获取最新的固件资料,这个时候你可以自己先从网上下载好自己需要的固件,然后在地面站里面选择“加载自定义固件”就可以了。至于固件资料,可以去github里面下载。但是要注意版本。一般刷固件的时间不是很长,等下面的进度条走完之后,在等个大概一两分钟就行了。固件加载成功后,就可以点击地面站右上角的connect连接APM,查看实时运行姿态和数据了。如果能查看实时数据,说明固件已经加载成功。其实加载固件就是我们平时给单片机下载程序嘛,你看固件都是.HEX文件,就是程序生成的下载文件嘛。通过USB串口下载。地面站就充当了一个程序下载器和上位机的作用。
然后就是遥控器、加速度计和罗盘的校准。
在进行遥控器校准的时候一定要对自己的遥控器熟悉,知道你的哪个摇杆对应你的接收机上的哪个通道,还要注意你接收机的这个通道连接到了APM 的哪个通道上了。这些在刚开始的都要弄清楚,最好自己先找个纸记下来,避免弄乱。
JP1短接之后就是由电调或者PM接口给飞控供电,也给接收机供电。拔掉之后是外部供电。
我用的是富斯i6控和接收机,昨天还好好的,今天给我的遥控器里面的模型改了一个名字 就发现遥控器和接收机无法连接了(也可能是其他原因),这时无法连接接收机上面的LED显示一直慢闪,表示接收机无法和遥控器连接。这时可以连接接收机的对码线(就是bat口的信号线和地线连接),然后按住遥控器的对码按键开机即可。当LED常亮的时候表示对码成功。
APM的解锁动作是以检测到第三通道最低值+第四通道最高值为标准的,即油门最低,方向最右。所以无论你是左手油门还是右手油门,只要你操作摇杆使油门最低,方向摇杆最右(pwm值最大)即可执行APM的解锁动作。当APM收到解锁信号后,APM会先自检,蓝灯开始闪烁,自检通过,解锁成功,红灯常亮(地面站中红色DISARMED会变成ARMED),表示解锁成功。此过程会持续5秒,所以解锁时请保持油门最低,方向最大的动作5秒以上。需要注意的是:APM解锁以后,15秒内没有任何操作,它会自动上锁。手动上锁方法:油门最低,方向最左(PWM最低)。
2017.11.11上午:
到此为止,基本上没有遇到什么大的问题,参数以及校准工作基本完成。接下来就是实际测试了。
3s航模电池注意事项:
长时间不用,很多常识都忘完了。今天就记录一下,备忘!
首先,3s航模电池是由3块锂电池组合而成的,每块电池的充电最高电压为4.25V,最低电压2.75V(一直以为 是3.5,其实是2.75)。也就是说你的3s电池的最高电压不要超过12.75V,最低不要低于8.25V,不然很容易过冲或者过放减小电池寿命。正常情况下,电池电压不应低于11.1V,不要高于12.7V!!
电池不要长期放置,定期给电池充电,保养电池。毕竟100多一块呢。
下午:
飞控装上F450机架,由于我使用的是大疆的电调,不带BEC,所以外部扩展一个稳压模块通过PM接口单独给飞控供电。安装完毕之后就可以进行小心的调试。
全家福:

APM飞控的使用心得的更多相关文章
- APM飞控修改数传模块方法
APM飞控修改数传模块方法 硬件 ARDUCOPTER第二代 数传模块(USB接口) 数传模块(telem接口) usb-ttl模块 修改方法 注意:APM固件版本和数传模块估计版本是分开的,但有一定 ...
- 多轴APM飞控调参
调参步骤: 遥控器,电动机和电调对应的APM飞控连线——遥控器校准——电调行程校准——加速度计校准——磁罗盘校准——故障保护设定(遥控器和飞控)——飞行模式设定并调整——自动调参设定选项 APM飞控调 ...
- APM飞控系统详细介绍
APM飞控系统详细介绍2013-04-05 12:28:24 来源: 评论:2 点击:10303 APM飞控系统是国外的一个开源飞控系统,能够支持固定翼,直升机,3轴,4轴,6轴飞行器.在此我 ...
- apm飞控飞行模式详解
1.稳定模式Stabilize稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用此模式.此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是FPV第一视角飞行的最 ...
- APM飞控学习之路的资料
飞控学习之路的资料 https://blog.csdn.net/u010682510 博客资料 https://blog.csdn.net/qq_26573899/article/category/7 ...
- apm固定翼调试方法
APM飞控传说是大神的神器新手的噩梦,APM是个便宜又好用的飞控~刚开始给我的天行者X5按APM飞控的时候也查询搜索了很多,参数值,修改和混控和混控量的修改翻遍了资料发现咱们论坛教程比较少,所以开帖总 ...
- APM的3DR无线数传的安装和调试
APM飞控修改数传模块方法 http://www.cnblogs.com/wsine/p/4909903.html APM的3DR无线数传的安装和调试 http://tieba.baidu.com/p ...
- 极客DIY:使用树莓派制作一架四轴无人机
如果你想DIY一台属于自己的无人机,那么接下来可以阅读这篇文章,阅读完毕之后也许对你会有启发. 这个项目主要用到的零件主要来自Erle Robotics(一个使用Linux系统的开源四轴飞行器项目). ...
- STM32作为主设备,Arduino作为从设备进行IIC通讯的注意要点
近日公司的项目重心要往米思齐的Arduino图形化编程上转移了,需要我将STM32和Arduino的IIC通讯调通.之前Arduino并没怎么使用过,仅仅是将超声波的代码移植成TOF激光测距而已.网上 ...
随机推荐
- VS2015常用快捷键
1.回到上一个光标位置/前进到下一个光标位置 1)回到上一个光标位置:使用组合键“Ctrl + -”: 2)前进到下一个光标位置:“Ctrl + Shift + - ”. 2.复制/剪切/删除整行代 ...
- IntelliJ IDEA删除代码的注释
由于反编译出的Java每一行都有注释,因此查找批量替换 搜索框,正则表达式 (/\*([^*]|[\r\n]|(\*+([^*/]|[\r\n])))*\*+/|[ \t]*//.*) 或者 (/\* ...
- 一个标准的,兼容性很好的div仿框架的基础模型!
<!DOCTYPE html> <html > <head> <meta http-equiv="Content-Type" conten ...
- 利用flask将opencv实时视频流输出到浏览器
opencv通过webcam可以获取本地实时视频流,但是如果需要将视频流共享给其他机器调用,就可以将利用flask框架构建一个实时视频流服务器,然后其他机器可以通过向这个服务器发送请求来获取这台机器上 ...
- matlab矩阵内存预分配
matlab矩阵内存预分配就意味着,划定一个固定的内存块,各数据可直接按"行.列指数"存放到对应的元素中.若矩阵中不预配置内存.则随着"行.列指数"的变大.MA ...
- 一个java程序员的年终总结
年底了,该给自己写点总结了! 从毕业到现在已经快4年啦,一直在Java的WEB开发行业混迹.我不是牛人,但是自我感觉还算是个合格的程序员,有必要写下自己将近4年来的经历,给自我以提示,给刚入行的朋友提 ...
- flexbox常用布局左右固定,中间自适应
<!DOCTYPE html> <html> <head> <meta charset="utf-8"> <meta name ...
- hwi-web安装
hwi是hive的简单简单web端 安装hwi之前需要下载apache-hive-2.1.1-src,将hwi/web的打成hive-hwi-2.1.1.war.安装配置apache-ant-1.10 ...
- proxy chains 试用
我的机子是通过一台windows机器上的CCProxy代理上网.可是在设置了系统代理以后,发现在终端下若要进行ftp或者ssh等操作,并不能使用代理(但是wget是可以的). 期间试过一些方法,比如在 ...
- Android学习之SeekBar(控制wav音频的声音)
使用SeekBar调节声音 SeekBar控件其实就是一个高级点的进度条,就像我们在听歌,看电影用的播放器上的进度条一样,是可以拖动的,可以改变进度的一个进度条控件! SeekBar常用属性: and ...