ROS学习(九)—— rqt_console 和 roslaunch
一、rqt_console 和rqt_logger_level
1、作用:
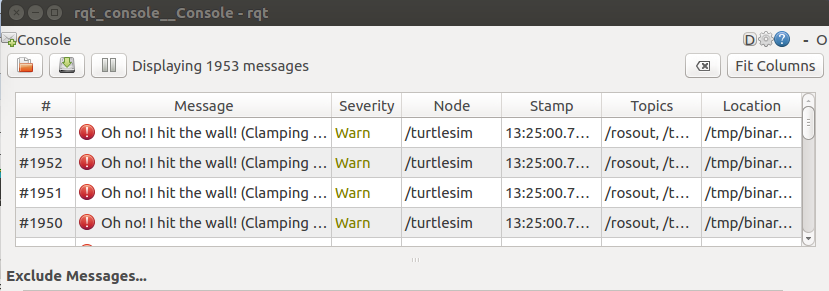
rqt_console依据ROS编译日志,输出节点信息
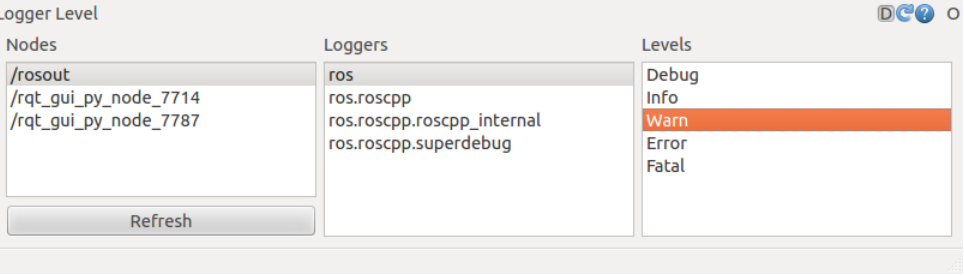
rqt_logger_level可以改变节点的警告出差的警告等级
2、使用方法
(1)打开rqt_console rqt_logger_level
rosrun rqt_console rqt_console
rosrun rqt_logger_level rqt_logger_level
(2)在新的终端,打开turtle
rosrun turtlesim turtlesim_node
在窗口会出现

然后我们改变logger level
(3)然后我们执行一条会出错的命令
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r -- '{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0,y: 0.0,z: 0.0}}'
会报错,撞到墙壁。
3、logger levels
有五个优先报错级别,从上到下,依次由高到低
Fatal
Error
Warn
Info
Debug
二、roslaunch
1、作用:
启动launch文件
2、语法
roslaunch [package] [filename.launch]
3、一个demo
(1)打开beginner_tutorials
cd ~/catkin_ws
source devel/setup.bash
roscd beginner_tutorials
(2)新建一个目录,用来存放launch文件(是一个好的习惯,可以不必这么做)
mkdir launch
cd launch
(3)新建一个launch文件:turtlemimic.launch
Toggle line numbers
<launch>
<group ns="turtlesim1">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<group ns="turtlesim2">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<node pkg="turtlesim" name="mimic" type="mimic">
<remap from="input" to="turtlesim1/turtle1"/>
<remap from="output" to="turtlesim2/turtle1"/>
</node>
</launch>
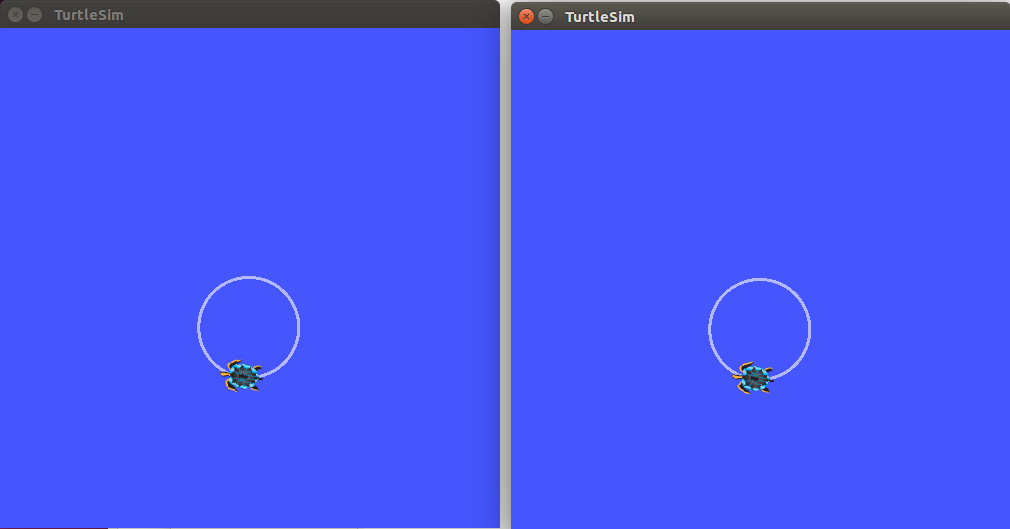
(4)调用launch文件
roslaunch beginner_tutorials turtlemimic.launch
再让其运动,第二个会复制第一个进行运动
rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
ROS学习(九)—— rqt_console 和 roslaunch的更多相关文章
- ROS学习笔记8-rqt_console和roslaunch
本教程来自于:http://wiki.ros.org/ROS/Tutorials/UsingRqtconsoleRoslaunch rqt_console 和 rqt_logger_level 是ro ...
- Ros学习调试——rqt_console
1.rqt_console rqt_console:ROS日志框架(logging framework)的一部分,用来显示节点的输出信息 rqt_logger_level:允许我们修改节点运行时输出信 ...
- ROS学习手记 - 6 使用ROS中的工具:rqt_console & roslaunch & rosed
http://wiki.ros.org/ROS/Tutorials/UsingRqtconsoleRoslaunch Using rqt_console and roslaunch This tuto ...
- 理解ROS rqt_console和 roslaunch
1.使用rqt_console和roslaunch 这篇教程将介绍使用rqt_console和rqt_logger_level来调试以及使用roslaunch一次启动许多nodes.如果你使用ROS ...
- ROS学习笔记七:在ROS中使用USB摄像头
下面是一些USB摄像头的驱动(大多数摄像头都支持uvc标准): 1 使用软件库里的uvc-camera功能包 1.1 检查摄像头 lsusb ----------------------------- ...
- 关于ROS学习的一些反思
距离发布上一篇ROS的博客已经过去两年了,才发现原来自己已经这么久可没有写过关于ROS的文章,想来很是惭愧.这两年时间,自己怀着程序员的梦想,研究过RTOS,探索过Linux,编写过Android应用 ...
- ROS学习手记 - 2.1: Create and Build ROS Package 生成包(Python)
ROS学习手记 - 2.1: Create and Build ROS Package 生成包(Python) 时隔1年,再回来总结这个问题,因为它是ros+python开发中,太常用的一个操作,需要 ...
- ROS学习手记 - 8 编写ROS的Publisher and Subscriber
上一节我们完成了 message & srv 文件的创建和加入编译,这次我们要玩简单的Publisher 和 Subscriber 要玩 Publisher 和 Subscriber, 需要具 ...
- ROS学习(四)—— 创建ROS Package
一.caktin Package的组成 1.必须含有 package.xml文件,提供有关程序包的元信息 2.必须含有一个catkin版本的 CmakeLists.txt文件,如果是一个catkin元 ...
- ROS学习网址【原创】
ROS学习网址 http://www.ros.org/ http://www.ros.org/news/book/ http://wiki.ros.org/ http://blog.exbot.net ...
随机推荐
- Python机器学习——线性模型
http://www.dataguru.cn/portal.php?mod=view&aid=3514 摘要 : 最近断断续续地在接触一些python的东西.按照我的习惯,首先从应用层面搞起, ...
- 微信小程序阿里云服务器https搭建
已更新 2018-11-20 1.什么是https?HTTPS(全称:安全套接字层上的超文本传输协议),是以安全为目标的HTTP通道,简单讲是HTTP的安全版.即HTTP下加入SSL层,HTTPS ...
- O2O、C2C、B2B、B2C
一.O2O.C2C.B2B.B2C的区别在哪里? O2O是Online to offline 分为四种运营模式 1.Online to offline 是线上交易到线下消费体验 2.Offline t ...
- mysql生成不重复随机数(unique number generation)
转自:http://blog.csdn.net/dreamer2020/article/details/52049629 问题来源 业务中有时会遇到要生成不重复随机数的情况,例如,新生成一个商品编号. ...
- .NET 服务器定位模式(Service Locator Pattern)——Common Service Locator
本文内容 场景 目标 解决方案 实现细节 思考 相关模式 更多信息 参考资料 Common Service Locator 代码很简单,它一般不会单独使用,而是作为一个单件模式,与像 .net Uni ...
- Mybatis源码分析之Cache二级缓存原理 (五)
一:Cache类的介绍 讲解缓存之前我们需要先了解一下Cache接口以及实现MyBatis定义了一个org.apache.ibatis.cache.Cache接口作为其Cache提供者的SPI(Ser ...
- 去除Win10快捷图标小箭头
有点强迫症,一看到操作系统上的快捷图标小箭头就想把它去除掉. 去除小箭头 reg add "HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\Windows\Cur ...
- POI3.10读取Excel模板填充数据后生成新的Excel文件
private final DecimalFormat df = new DecimalFormat("#0.00"); public void test(){ String fi ...
- canvas绘制图片
canvas保存为data:image扩展功能的实现 [已知]canvas提供了toDataURL的接口,可以方便的将canvas画布转化成base64编码的image.目前支持的最好的是png格式, ...
- Mysql查询数据库表结构以及字段类型并展示
1.建表语句sys_user CREATE TABLE `sys_user` ( `id` varchar(32) NOT NULL COMMENT '编号', `dept_id` varchar(3 ...