jz2440-linux3.4.2-kernel移植【学习笔记】【原创】
平台:jz2440
作者:庄泽彬(欢迎转载,请注明作者)
说明:韦东山二期视频学习笔记
交叉编译工具:arm-linux-gcc (GCC)4.3.2
linux:linu3.4.2
PC环境:ubuntu18.04
一、kernel的编译和烧录:
下载linux-3.4.2版本进行移植,下载链接:https://mirrors.edge.kernel.org/pub/linux/kernel/v3.x/
修改顶层Makefile,设置为arm架构,以及设置交叉工具链
zhuang@zhuang:~/project/-jz2440/systems/linux-3.4.$ git diff .
diff --git a/Makefile b/Makefile
index 901a9557..9cc1639a
--- a/Makefile
+++ b/Makefile
@@ -, +, @@ SUBARCH := $(shell uname -m | sed -e s/i./i386/ -e s/sun4u/sparc64/ \
# Default value for CROSS_COMPILE is not to prefix executables
# Note: Some architectures assign CROSS_COMPILE in their arch/*/Makefile
export KBUILD_BUILDHOST := $(SUBARCH)
-ARCH ?= $(SUBARCH)
-CROSS_COMPILE ?= $(CONFIG_CROSS_COMPILE:"%"=%)
+ARCH ?= arm
+CROSS_COMPILE ?= arm-linux- # Architecture as present in compile.h
UTS_MACHINE := $(ARCH)
编译:
make s3c2410_defconfig
make uImage -j4

哎呀,竟然报了下面这个错误:

应该是高版本的make导致这个错误出现的,按照错误的log修改文件。
修改如下:
diff --git a/kernel/timeconst.pl b/kernel/timeconst.pl
index eb51d76e..
--- a/kernel/timeconst.pl
+++ b/kernel/timeconst.pl
@@ -, +, @@ if ($hz eq '--can') {
} @val = @{$canned_values{$hz}};
- if (!defined(@val)) {
+ if (!@val) {
@val = compute_values($hz);
}
output($hz, @val);
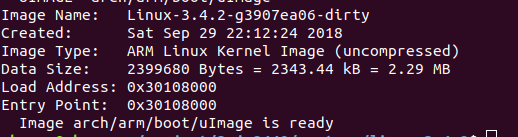
生成对应的uImage :
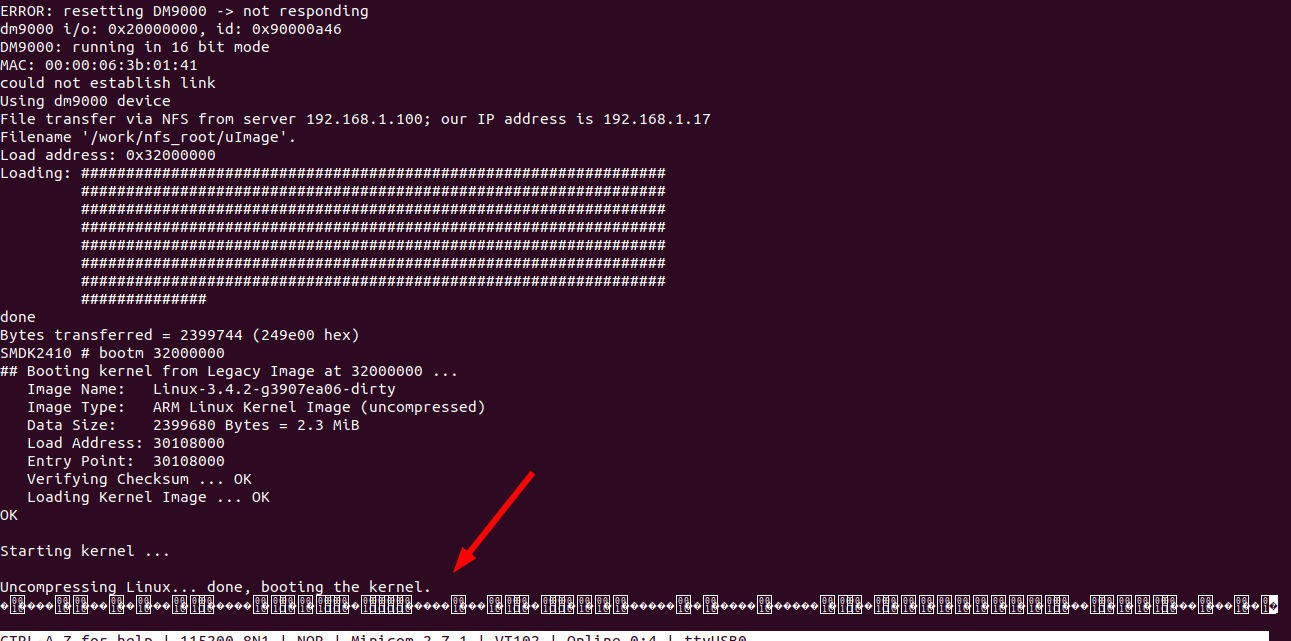
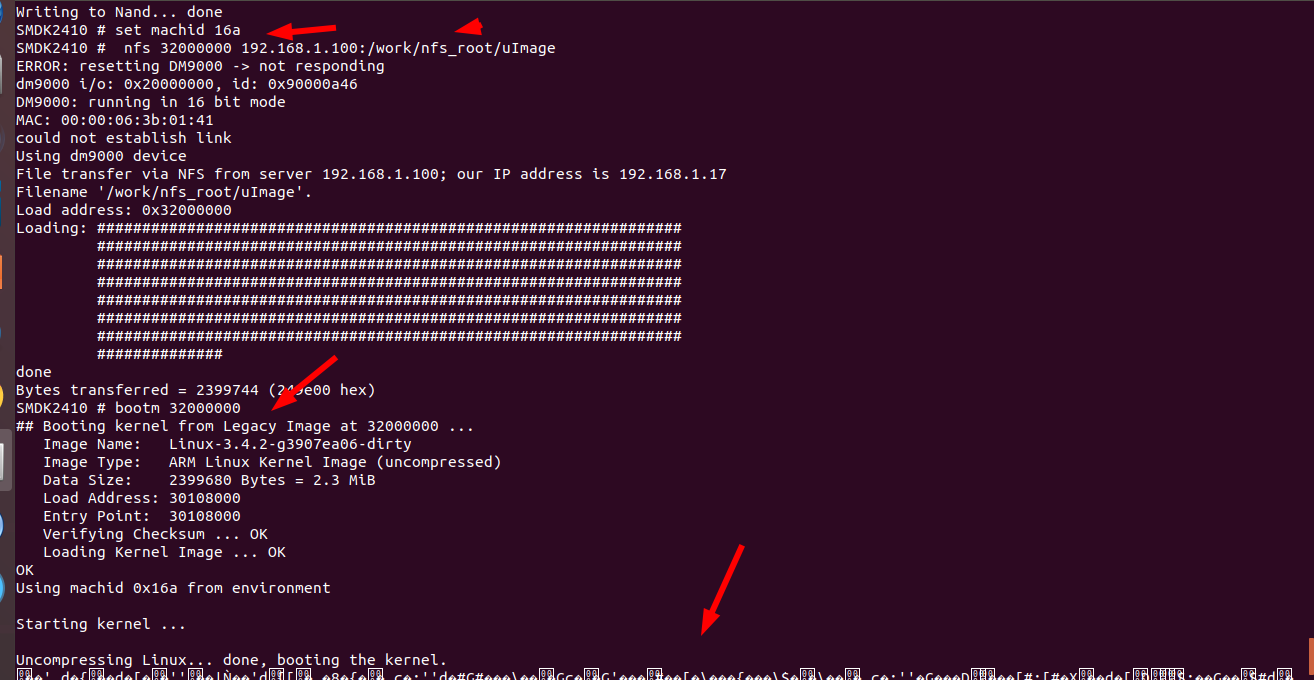
上述编译出来的内核烧录到板子加载内核却出现乱码,出现乱码,有可能是我们的机器ID没有设置好,导致调用的初始化错误导致的。:
二 、内核的启动
uboot启动内核主要的操作如下,从nandflash里把内核读入内存,设置TAG参数(内存的起始地址大小,命令行参数等等),R1存放机器ID,R2存放参数的存放地址,内核在启动的时候会解析TAG参数,根据uboot传递过来的机器ID,判断是否能够支持该机器,从而调用对应板子的初始化函数.
uboot设置机器ID的代码主要流程如下:
Smdk2410.c (board\samsung\smdk2440)
board_init
gd->bd->bi_arch_number = MACH_TYPE_SMDK2410; //设置机器ID的默认值
Bootm.c (arch\arm\lib)
boot_jump_linux
unsigned long machid = gd->bd->bi_arch_number;
s = getenv("machid"); //可根据环境变量设置机器ID
我在cmdline随便设置一个machid,看看内核支持那些板子
set machid
启动过程打印的log,根据log可以看出有匹配对应的开发板子的一个过程,最后由于匹配失败,卡在这里。
OK
Using machid 0x33333 from environment Starting kernel ... Uncompressing Linux... done, booting the kernel. Error: unrecognized/unsupported machine ID (r1 = 0x00033333). Available machine support: ID (hex) NAME
AML_M5900
0000014b Simtec-BAST
0000015b IPAQ-H1940
0000039f Acer-N35
Acer-N30
000002a8 Nex Vision - Otom 1.1
QT2410
000000c1 SMDK2410
000005b4 TCT_HAMMER
000001db Thorcom-VR1000
000005d2 JIVE
000003fe SMDK2413
000003f1 SMDK2412
S3C2413
VSTMS
SMDK2416
000002de Simtec-Anubis
AT2440EVB
000007cf MINI2440
000002a9 NexVision - Nexcoder
0000034a Simtec-OSIRIS
IPAQ-RX3715
0000016a SMDK2440
GTA02
000003b8 HP iPAQ RX1950
0000043c SMDK2443
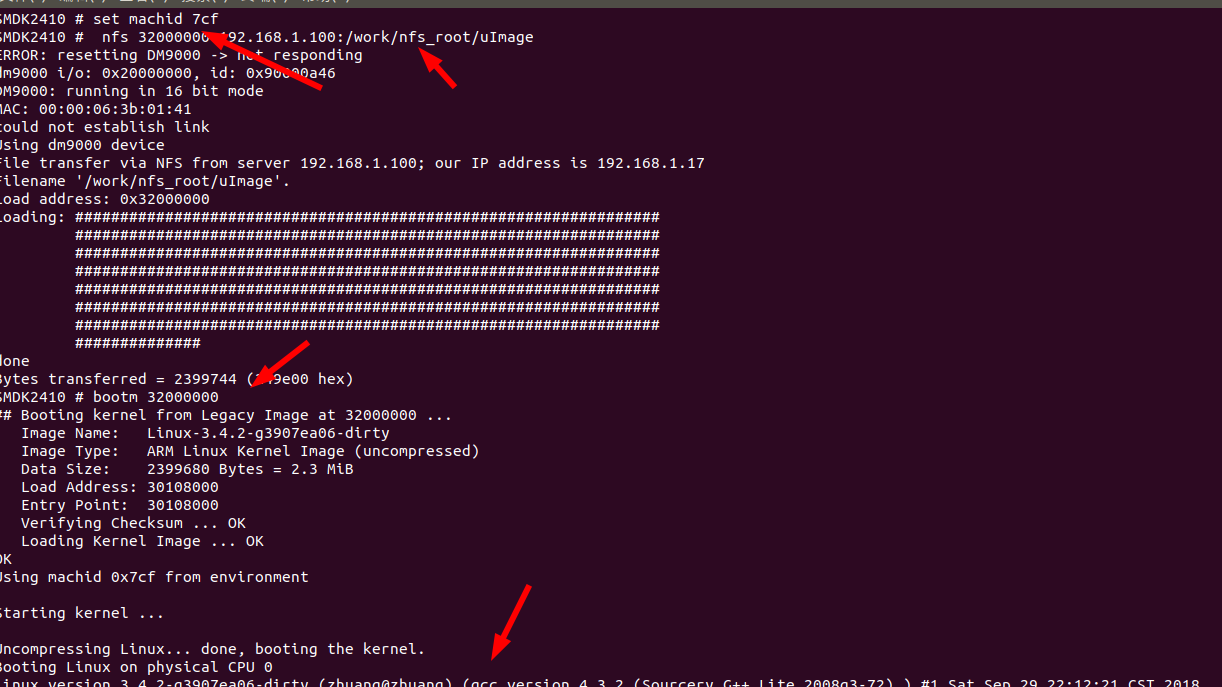
2.1 支持mini2440开发板的machid 7cf
设置cmdline波特率为115200
set bootargs console=ttySAC0, root=/dev/mtdblock3 nfs 32000000 192.168.1.100:/work/nfs_root/uImage //烧录内核命令
设置machid为mini2440的开发板7cf,启动,串口不会有乱码.
2.2支持smdk2440开发板的machid 16a
设置machid为smdk2440开发板16a,串口却出现乱码:
我们来看看内核smd2440开发板初始化代码,是不是跟jz2440有差异:
Mach-smdk2440.c (arch\arm\mach-s3c24xx)
MACHINE_START(S3C2440, "SMDK2440")
/* Maintainer: Ben Dooks <ben-linux@fluff.org> */
.atag_offset = 0x100,
.init_irq = s3c24xx_init_irq,
.map_io = smdk2440_map_io, //这个函数的初始化化有点问题,
.init_machine = smdk2440_machine_init,
.timer = &s3c24xx_timer,
.restart = s3c244x_restart,
MACHINE_END
static void __init smdk2440_map_io(void)
{
s3c24xx_init_io(smdk2440_iodesc, ARRAY_SIZE(smdk2440_iodesc));
s3c24xx_init_clocks(16934400); //jz2440开发板是12M的晶振,使用使用smdk2440的machid,这里要修改为12000000
s3c24xx_init_uarts(smdk2440_uartcfgs, ARRAY_SIZE(smdk2440_uartcfgs));
}
代码修改如下,支持smdk2440开发板,串口输出不会有乱码:
zhuang@zhuang:~/project/-jz2440/systems/linux-3.4.$ git diff .
diff --git a/arch/arm/mach-s3c24xx/mach-smdk2440.c b/arch/arm/mach-s3c24xx/mach-smdk2440.c
index 83a1036d..b92c2bd5
--- a/arch/arm/mach-s3c24xx/mach-smdk2440.c
+++ b/arch/arm/mach-s3c24xx/mach-smdk2440.c
@@ -, +, @@ static struct platform_device *smdk2440_devices[] __initdata = {
static void __init smdk2440_map_io(void)
{
s3c24xx_init_io(smdk2440_iodesc, ARRAY_SIZE(smdk2440_iodesc));
- s3c24xx_init_clocks();
+ s3c24xx_init_clocks(); //jz2440开发板是12M的晶振,使用使用smdk2440的machid,这里要修改为12000000
s3c24xx_init_uarts(smdk2440_uartcfgs, ARRAY_SIZE(smdk2440_uartcfgs));
}
设置为smdk2440开发板的machid 16a,启动系统串口没有输出乱码见下图:

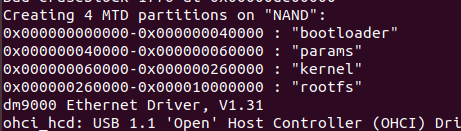
三、修改内核分区
内核将nandflash分区划分如下:
1 0x00000000-0x00040000 : "bootloader"
2 0x00040000-0x00060000 : "params"
3 0x00060000-0x00260000 : "kernel"
4 0x00260000-0x10000000 : "root"
代码修改如下:
1 diff --git a/arch/arm/mach-s3c24xx/common-smdk.c b/arch/arm/mach-s3c24xx/common-smdk.c
2 index 084604be..f7dce9b9 100644
3 --- a/arch/arm/mach-s3c24xx/common-smdk.c
4 +++ b/arch/arm/mach-s3c24xx/common-smdk.c
5 @@ -110,43 +110,23 @@ static struct platform_device smdk_led7 = {
6
7 static struct mtd_partition smdk_default_nand_part[] = {
8 [0] = {
9 - .name = "Boot Agent",
10 - .size = SZ_16K,
11 + .name = "bootloader",
12 + .size = SZ_256K,
13 .offset = 0,
14 },
15 [1] = {
16 - .name = "S3C2410 flash partition 1",
17 - .offset = 0,
18 - .size = SZ_2M,
19 + .name = "params",
20 + .offset = MTDPART_OFS_APPEND,
21 + .size = SZ_128K,
22 },
23 [2] = {
24 - .name = "S3C2410 flash partition 2",
25 - .offset = SZ_4M,
26 - .size = SZ_4M,
27 - },
28 - [3] = {
29 - .name = "S3C2410 flash partition 3",
30 - .offset = SZ_8M,
31 + .name = "kernel",
32 + .offset = MTDPART_OFS_APPEND,
33 .size = SZ_2M,
34 },
35 - [4] = {
36 - .name = "S3C2410 flash partition 4",
37 - .offset = SZ_1M * 10,
38 - .size = SZ_4M,
39 - },
40 - [5] = {
41 - .name = "S3C2410 flash partition 5",
42 - .offset = SZ_1M * 14,
43 - .size = SZ_1M * 10,
44 - },
45 - [6] = {
46 - .name = "S3C2410 flash partition 6",
47 - .offset = SZ_1M * 24,
48 - .size = SZ_1M * 24,
49 - },
50 - [7] = {
51 - .name = "S3C2410 flash partition 7",
52 - .offset = SZ_1M * 48,
53 + [3] = {
54 + .name = "rootfs",
55 + .offset = MTDPART_OFS_APPEND,
56 .size = MTDPART_SIZ_FULL,
57 }
58 };
59 zhuang@zhuang:~/project/3-jz2440/systems/linux-3.4.2$
内核启动将会把nandflash划分为上述四个分区
四、制作新的文件系统
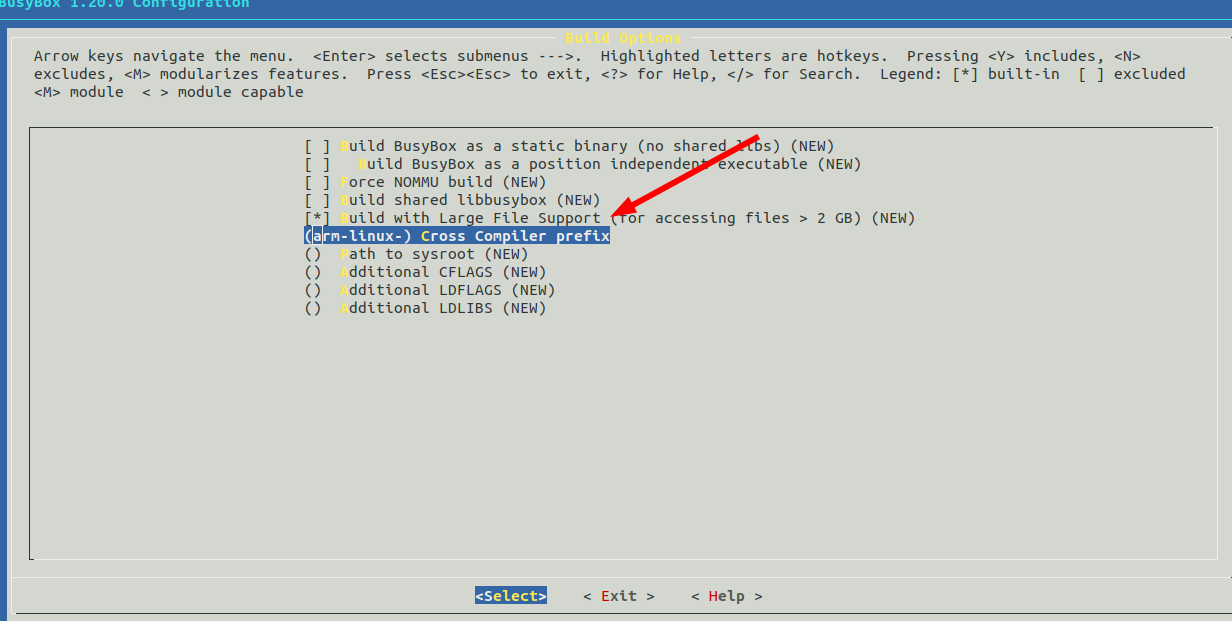
3.1编译busybox1.20.0
解压busybox
tar -xvf busybox-1.20..tar.bz2

设置交叉工具链make menuconfig

编译
make
安装
make install CONFIG_PREFIX=/work/nfs_root/fs_mini_mdev_new
从交叉工具链安装glibc
cd /work/nfs_root/fs_mini_mdev_new
mkdir lib usr/lib
3 cp /usr/local/arm/4.3.2/arm-none-linux-gnueabi/libc/armv4t/lib/*so* lib/ -d
4 cp /usr/local/arm/4.3.2/arm-none-linux-gnueabi/libc/armv4t/usr/lib/*so* usr/lib/ -d
创建etc目录
mkdir etc
在etc目录下创建inittab文件
vim inittab //内容从2-6行
# /etc/inittab
::sysinit:/etc/init.d/rcS
console::askfirst:-/bin/sh
::ctrlaltdel:/sbin/reboot
::shutdown:/bin/umount -a -r
在etc目录下穿件init.d/rcS文件
mkdir init.d
vim init.d/rcS
chmod a+x init.d/rcS //设置为可执行文件
rcS文件内容如下:
#!/bin/sh mount -a
mkdir /dev/pts
mount -t devpts devpts /dev/pts
echo /sbin/mdev > /proc/sys/kernel/hotplug
mdev -s
在etc目录下创建fstab文件:内容如下:
# device mount-point type options dump fsck order
proc /proc proc defaults
tmpfs /tmp tmpfs defaults
sysfs /sys sysfs defaults
tmpfs /dev tmpfs defaults
创建dev目录:
mkdir dev
sudo mknod console c
sudo mknod null c
创建其他目录
mkdir proc tmp mnt sys root
编译制作jffs2映像文件的工具
tar -xvf mtd-utils-05.07..tar.bz2
cd mtd-utils-05.07./util
make
sudo make install
//根据需要有可能要先编译zlib库
将fs_mini_mdev_new目录制作成文件系统镜像命令:
mkfs.jffs2 -n -s -e 128KiB -d fs_mini_mdev_new -o fs_mini_mdev_new.jffs2
在uboot中将文件系统和内核烧录进系统命令
nfs 192.168.1.100:/work/nfs_root/fs_mini_mdev_new.jffs2
nand erase.part rootfs
nand write.jffs2 $filesize
set bootargs console=ttySAC0, root=/dev/mtdblock3 rootfstype=jffs2
//烧录内核
nfs 192.168.1.100:/work/nfs_root/uImage
7 bootm 32000000
启动系统,却报了如下的错误,这是由于我们的交叉工具链接在编译的时候是使用eabi接口的,内核也要使用这种接口才行
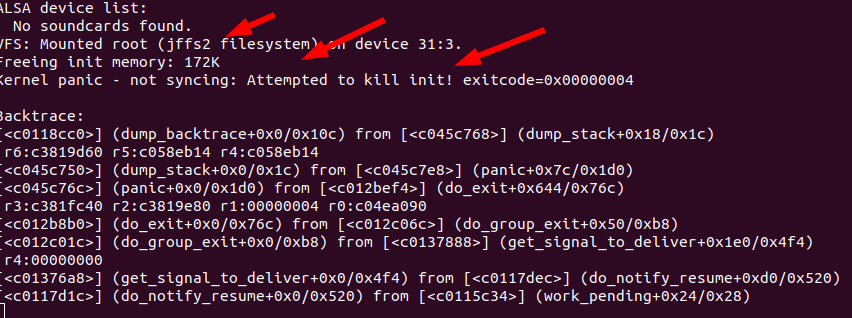
进入内核make menuconfig,加上EABI接口
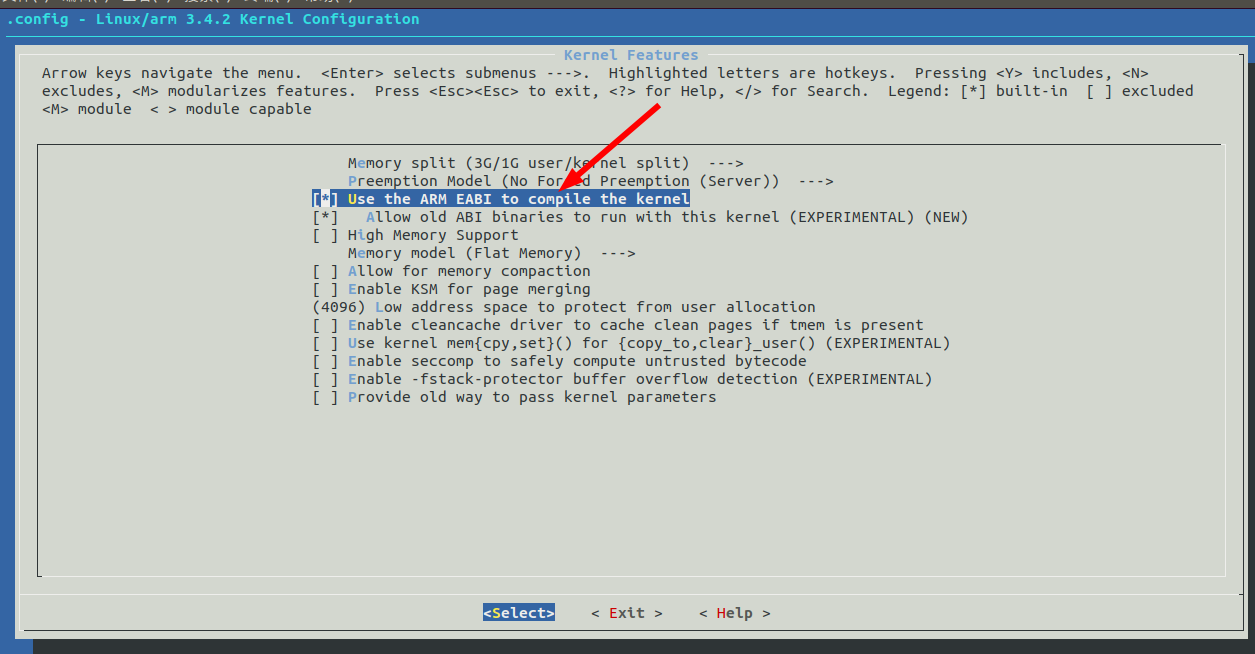
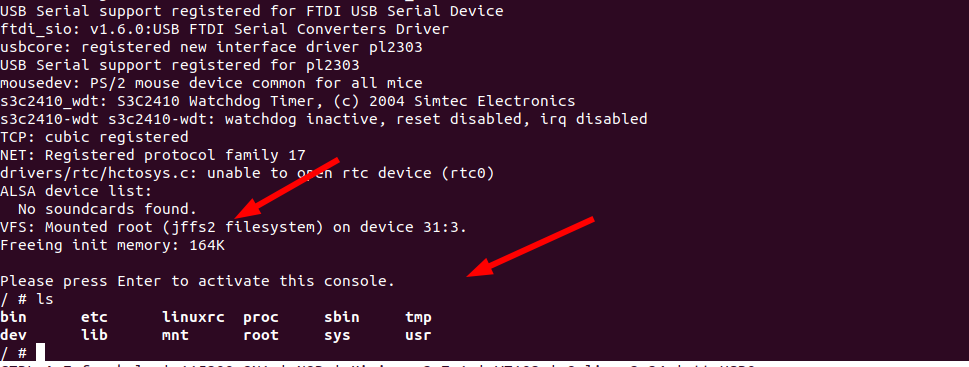
重新烧录系统,成功进入系统没有问题。
五、移植yaffs文件系统
下载yaffs文件系统的链接:https://yaffs.net/get-yaffs
或者使用git下载命令:
git clone git://www.aleph1.co.uk/yaffs2
将yaffs文件系统源码安装到内核:
./patch-ker.sh c m /home/zhuang/project/-jz2440/systems/linux-3.4.

make menuconfig选中yaffs文件系统
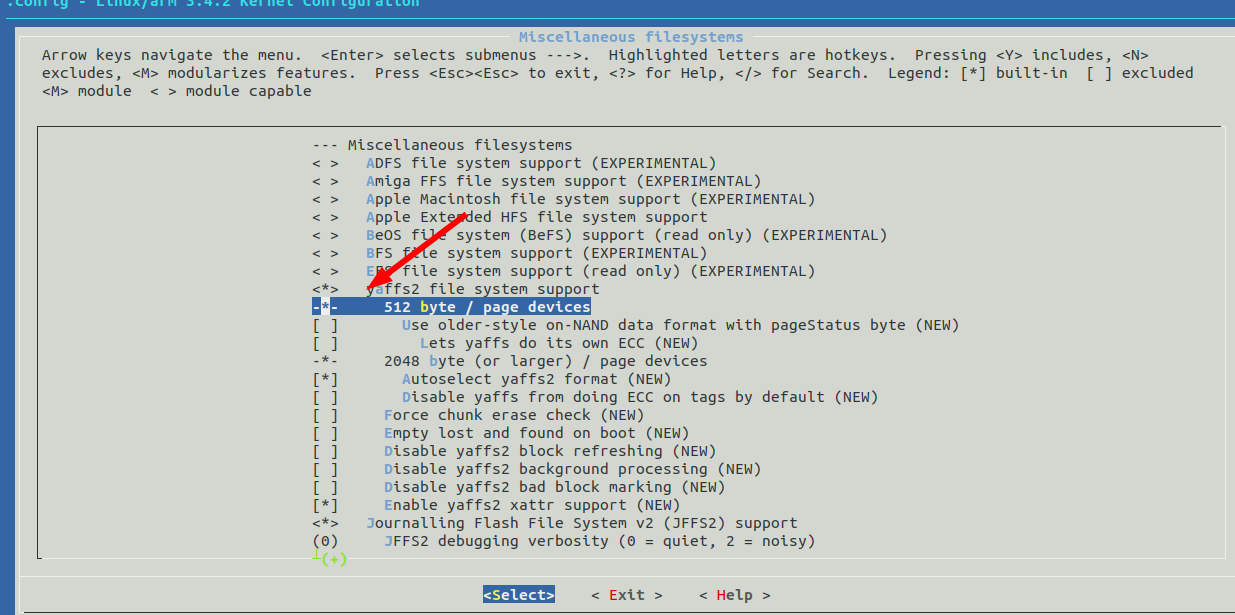
编译却报了如下的错误:

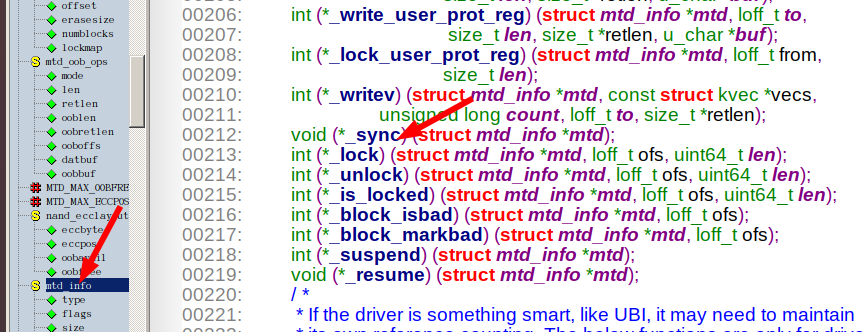
查看内核struct mtd_info的定义,并没有sync成员而是_sync,把报错的地方都加上_即可。
将文件系统制作成yaffs2文件系统镜像
mkyaffs2image fs_mini_mdev_new fs_mini_mdev_new.yaffs2
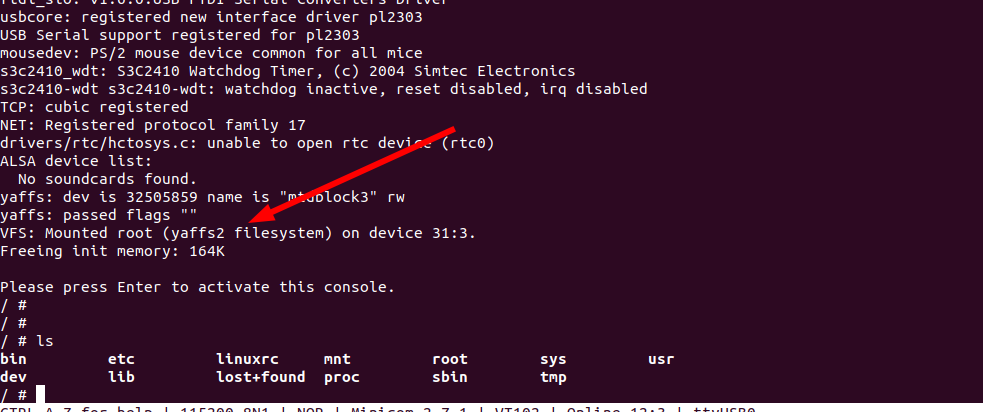
烧录启动:
nfs 192.168.1.100:/work/nfs_root/fs_mini_mdev_new.yaffs2
nand erase.part rootfs
nand write.yaffs $filesize
jz2440-linux3.4.2-kernel移植【学习笔记】【原创】的更多相关文章
- JZ2440裸机点亮LED【学习笔记】
平台:jz2440 作者:庄泽彬(欢迎转载,请注明作者) 说明:韦东山一期视频学习笔记 一.我们首先来做第一个实验,用汇编语言点亮板子上的LED. 1.1 LED的原理图 从下面的原理图可知LED1是 ...
- MongoDB 学习笔记(原创)
MongoDB 学习笔记 mongodb 数据库 nosql 一.数据库的基本概念及操作 SQL术语/概念 MongoDB术语/概念 解释/说明 database database 数据库 table ...
- kernel&uboot学习笔记
uboot kernel uboot 1.Uboot编译流程分析: uboot是如何编译生成的? 2.根据include/configs/$(target).h可以生成include/autoconf ...
- NXP NFC移植及学习笔记(原创)
NFC功能介绍 NFC 目前使用的三种功能: 1. P2P模式:基于LLCP协议的基础上,以NDEF数据交换格式来通信. 2. 读写模式:当作为读卡器,对NFC Tag的读写. 3. 卡模拟模式:模块 ...
- Unity3D之移植学习笔记:移植到Android平台更好的方法
接上文,之前我们采用了直接将Unity项目导出为Eclipse项目来修改的方式,这种做法存在的一个最大的问题就是:每当Unity被修改之后,都需要重新导出,而每次导出的项目在Android平台方面的J ...
- Zynq-Linux移植学习笔记之27UIO机制响应外部中断实现【转】
转自:https://blog.csdn.net/zhaoxinfan/article/details/80285150 版权声明:本文为博主原创文章,未经博主允许不得转载. https://blog ...
- Zynq-Linux移植学习笔记之十-u-boot网络配置
在zynq开发板zc706上,网络通路由下面三个设备组成: 其中zynq负责对phy进行配置,当zynq上的网络控制器以及phy完成正确配置时,能够看到RJ45上面的黄灯亮,此时表明链路已经通了.如果 ...
- Unity3D之移植学习笔记:移植到Android平台
首先,我们需要一台已经配置好可以开发Android应用的计算机,这里我使用的是Windows系统+Eclipse+ADT的开发环境,当然也可以使用Android Studio或者使用Mac系统都可以. ...
- Android移植学习笔记
1.一头雾水不知道用什么编译环境,不知道用什么下载软件 编译软件:Ubuntu12.04(编译主机系统),JDK(Java) 下载软件: 模拟器: qemu
- Angular源代码学习笔记-原创
时间:2014年12月15日 14:15:10 /** * @license AngularJS v1.3.0-beta.15 * (c) 2010-2014 Google, Inc. http:// ...
随机推荐
- Jquery获取元素的位置
$(".curr_play").position().left //元素距离父级元素左侧位置 $(".curr_play").offset().left //元 ...
- 爱上 SQLAlchemy 的 10 个理由(转)
原文:http://python.jobbole.com/82453/ 本文由 伯乐在线 - Namco 翻译,唐尤华 校稿.未经许可,禁止转载!英文出处:Paul Johnston.欢迎加入翻译组. ...
- AspNetPager.dll 分页控件使用
今天在用.net 做网站的时候,用到了DATALIST,但是datalist 没有自带的分页控件,后来在网上找了好长时间,看了aspnetpager.dll这个控件,这个控件挺好用的.我把使用方法写出 ...
- 13 jmeter性能测试实战--FTP程序
需求 上传一个文件到服务器(put),下载一个文件到本地(get). 测试步骤 1.创建一个线程组. 2.线程组-->添加-->配置元件-->FTP请求缺省值(可有可无,相当于给“服 ...
- winform dataGridView DataGridViewComboBoxColumn 下拉框事件代码
有一个dataGridView ,有一列是DataGridViewComboBoxColumn .我用动态绑定,在绑定数据的时候.我们也给这一列绑定数据 在dataGridView的RowsAdded ...
- Qt计时器
在Qt中使用定时器有两种方法,一种是使用QObiect类的定时器:一种是使用QTimer类.定时器的精确性依赖于操作系统和硬件,大多数平台支持20ms的精确度. ■.QObject类的定时器QObje ...
- Summary: Lowest Common Ancestor in a Binary Tree & Shortest Path In a Binary Tree
转自:Pavel's Blog Now let's say we want to find the LCA for nodes 4 and 9, we will need to traverse th ...
- zend studio9破解版
一.下载window http://downloads.zend.com/studio-eclipse/9.0.3/ZendStudio-9.0.3.msi 下载linux64 http://down ...
- YUV编码格式
YUV是被欧洲电视系统采用的一种颜色编码方法.在现代彩色电视系统中,通常采用三管彩色摄影机或彩色CCD摄像机取像,然后把取 得的彩色图像信号经过分色,分别放大校正后得到RGB,在经过矩阵变换电路,得到 ...
- STA分析(四) lib model
library中的一个cell可以是一个standard cell,IO buffer,或者一个complex IP.其中包含area,functionality,timing,power等相关的信息 ...