激光相机数据融合(5)--Gazebo仿真数据融合
这一节将用ROS+Gazebo 环境获取激光获取点云,并用PCL和OPENCV处理,源代码在:https://github.com/ZouCheng321/5_laser_camera_sim
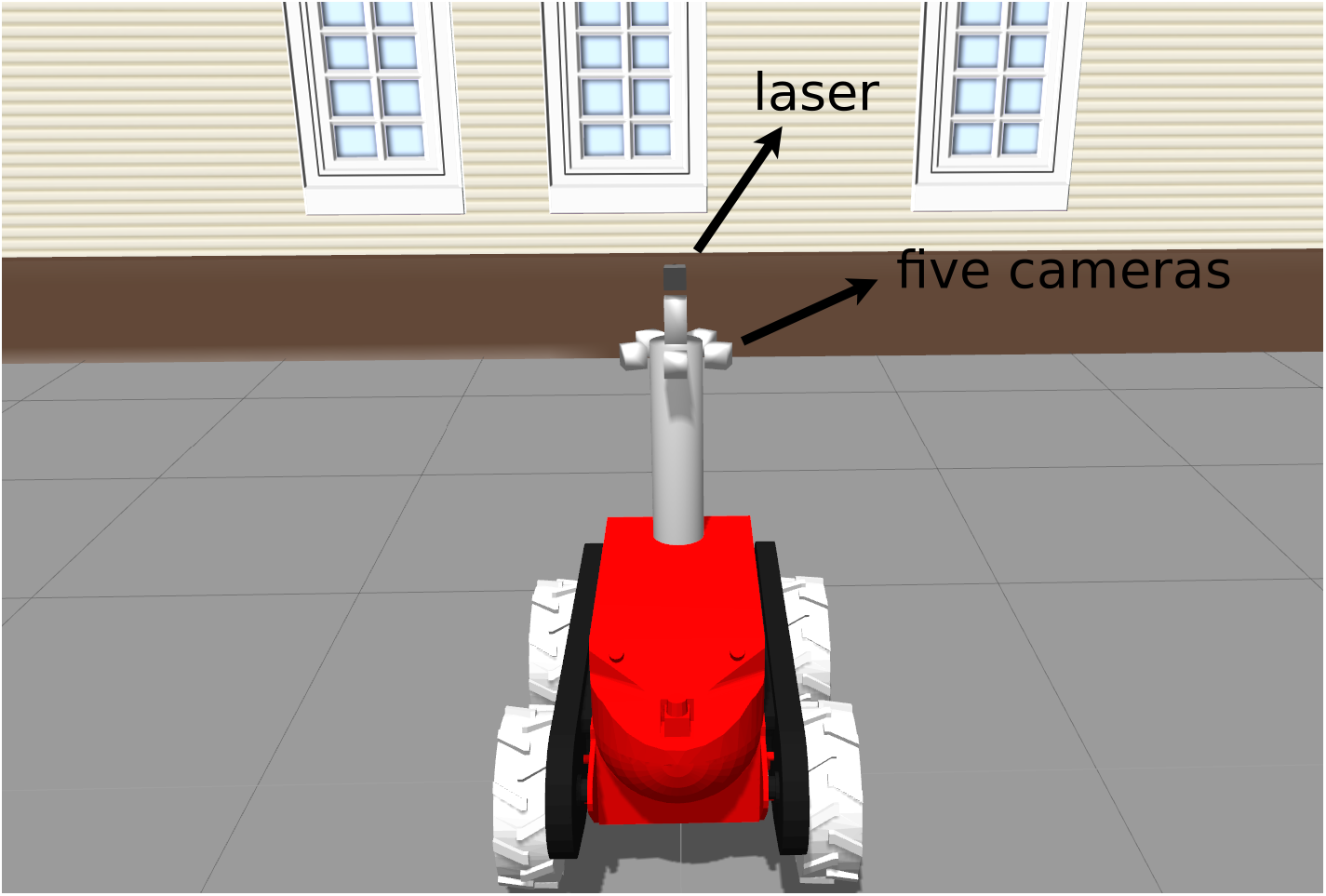
由于激光的视角远大于相机,所以我们使用了5个相机来获取图像,这类似于Ladybug相机:
相机获取的五张图像:

接下来我们用来构建彩色点云:
相机与激光的位置变换,由于是正五边形分别,这很容易求得:
Eigen::Matrix4f rt0,rt1,rt2,rt3,rt4;
rt0<< ,,-,, ,,,, ,,,, ,,,;
rt1<< ,,-,, -0.95105651629,0.30901699437,,, 0.30901699437,0.95105651629,,, ,,,;
rt2 << ,,-,, -0.58778525229,-0.80901699437,,, -0.80901699437,0.58778525229,,, ,,,;
rt3 << ,,-,, 0.58778525229,-0.80901699437,,, -0.80901699437,-0.58778525229,,, ,,,;
rt4 << ,,-,, 0.95105651629,0.30901699437,,, 0.30901699437,-0.95105651629,,, ,,,;
Eigen::Matrix4f inv0,inv1,inv2,inv3,inv4;
inv0=rt0.inverse();
inv1=rt1.inverse();
inv2=rt2.inverse();
inv3=rt3.inverse();
inv4=rt4.inverse(); RT.push_back(rt0);
RT.push_back(rt1);
RT.push_back(rt2);
RT.push_back(rt3);
RT.push_back(rt4); INV.push_back(inv0);
INV.push_back(inv1);
INV.push_back(inv2);
INV.push_back(inv3);
INV.push_back(inv4);
相机的内参,已经在仿真软件中设定:
std::vector<cv::Point2d> imagePoints;
cv::Mat intrisicMat(, , cv::DataType<double>::type); // Intrisic matrix
intrisicMat.at<double>(, ) = 476.715669286;
intrisicMat.at<double>(, ) = ;
intrisicMat.at<double>(, ) = ;
intrisicMat.at<double>(, ) = ;
intrisicMat.at<double>(, ) = 476.715669286;
intrisicMat.at<double>(, ) = ;
intrisicMat.at<double>(, ) = ;
intrisicMat.at<double>(, ) = ;
intrisicMat.at<double>(, ) = ;
cv::Mat rVec(, , cv::DataType<double>::type); // Rotation vector
rVec.at<double>() = ;
rVec.at<double>() = ;
rVec.at<double>() = ;
cv::Mat tVec(, , cv::DataType<double>::type); // Translation vector
tVec.at<double>() = 0.4;
tVec.at<double>() = ;
tVec.at<double>() = -0.1;
cv::Mat distCoeffs(, , cv::DataType<double>::type); // Distortion vector
distCoeffs.at<double>() = ;
distCoeffs.at<double>() = ;
distCoeffs.at<double>() = ;
distCoeffs.at<double>() = ;
distCoeffs.at<double>() = ;
去除相机后方的点云:
std::vector<cv::Point3d> Generate3DPoints(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud,int num)
{
std::vector<cv::Point3d> points;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_f (new pcl::PointCloud<pcl::PointXYZ>); Eigen::Matrix4f TR;
TR << ,,-,, ,,,, ,,,, ,,,;
pcl::transformPointCloud (*cloud, *cloud_f, RT[num]); pcl::PassThrough<pcl::PointXYZ> pass;
pass.setInputCloud (cloud_f);
pass.setFilterFieldName ("z");
pass.setFilterLimits (0.0, );
//pass.setFilterLimitsNegative (true);
pass.filter (*cloud);
cout<<"size:"<<cloud->size()<<endl; for(int i=;i<=cloud->points.size();i++)
{
points.push_back(cv::Point3d(cloud->points[i].x, cloud->points[i].y, cloud->points[i].z));
} return points;
}
将前方的点云投影到相机平面,这里直接用opencv自带的projectPoints函数:
cv::projectPoints(objectPoints, rVec, tVec, intrisicMat, distCoeffs, imagePoints);
保留图像内的点云:
for(int i=;i<imagePoints.size();i++)
{
if(imagePoints[i].x>=&&imagePoints[i].x<&&imagePoints[i].y>=&&imagePoints[i].y<)
{ pcl::PointXYZRGB point;
point.x = cloud->points[i].x;
point.y = cloud->points[i].y;
point.z = cloud->points[i].z;
point.r = _I(round(imagePoints[i].x),round(imagePoints[i].y))[];
point.g = _I(round(imagePoints[i].x),round(imagePoints[i].y))[];
point.b = _I(round(imagePoints[i].x),round(imagePoints[i].y))[]; colored_cloud->points.push_back (point);
}
}
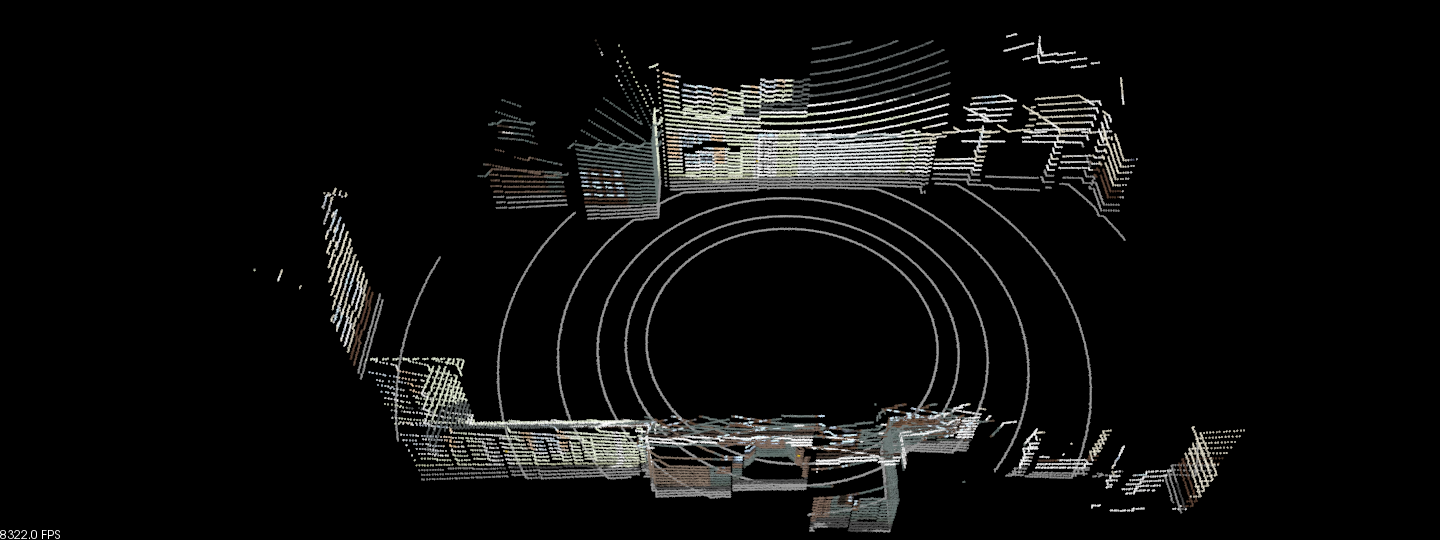
最后显示所有点云:
pcl::visualization::PCLVisualizer viewer("Cloud viewer");
viewer.addPointCloud(colored_cloud_sum, "sample cloud");
viewer.setBackgroundColor(,,);
while(!viewer.wasStopped())
//while (!viewer->wasStopped ())
viewer.spinOnce();
要构建这个项目:
cd 5_laser_camera_sim
mkdir build
cd build
cmake ..
make
./color
将看到如下显示:
激光相机数据融合(5)--Gazebo仿真数据融合的更多相关文章
- 七牛云 融合CDN测试域名 -> 融合CDN加速域名
七牛云 融合CDN测试域名 -> 融合CDN加速域名 本篇主要讲解 如何将七牛云融合CDN测试域名 切换到自定义的加速域名上去,为什么会写这篇是因为我收到了一封 [七牛云]测试域名回收通知的邮件 ...
- 激光相机数据融合(4)--KITTI数据集中matlab接口说明及扩展
KITTI数据集接口已经提供了matlab接口,本篇将说明详细说明其应用并与PCL进行对接.PCL为C++点云处理语言库,详情可见:http://pointclouds.org/ 程序可以从官网下载, ...
- 激光相机数据融合(3)--KITTI数据集
KITTI数据集提供了双目图像,激光数据,和imu/gps位置信息,其中还包括了大量的算法.下载地址为:http://www.cvlibs.net/datasets/kitti/raw_data.ph ...
- 数据融合(data fusion)原理与方法
数据融合(data fusion)原理与方法 数据融合(data fusion)最早被应用于军事领域. 现在数据融合的主要应用领域有:多源影像复合.机器人和智能仪器系统.战场和无人驾驶飞机.图 ...
- IDM主机上安装融合应用程序配置框架
IDM主机上安装融合应用程序配置框架 安装Oracle融合应用程序>设置>身份和访问管理节点安装融合应用程序配置框架 由于我们使用Oracle VirtualBox虚拟机这一次,我们在 ...
- DirectX基础学习系列5 融合技术
7.1融合方程 1概念 融合技术将当前光栅化像素的颜色与以前已光栅化并处于同一个位置的像素颜色进行合成,即将当前要进行光栅化的三角形单元与已写入后台的像素进行融合 2需要遵循的原则: (1)先绘制不需 ...
- Gluon炼丹(Kaggle 120种狗分类,迁移学习加双模型融合)
这是在kaggle上的一个练习比赛,使用的是ImageNet数据集的子集. 注意,mxnet版本要高于0.12.1b2017112. 下载数据集. train.zip test.zip labels ...
- SSE图像算法优化系列二十九:基础的拉普拉斯金字塔融合用于改善图像增强中易出现的过增强问题(一)
拉普拉斯金字塔融合是多图融合相关算法里最简单和最容易实现的一种,我们在看网络上大部分的文章都是在拿那个苹果和橙子融合在一起,变成一个果橙的效果作为例子说明.在这方面确实融合的比较好.但是本文我们主要讲 ...
- GDAL多光谱与全色图像融合简单使用
目录 简述 C++代码 效果对比 GDAL融合效果和原始多光谱波段对比 GDAL融合效果和原始全色波段对比 ARCGIS融合效果与原始全色和多光谱对比 GDAL融合效果与ArcGIS融合效果对比 简述 ...
随机推荐
- SQL server学习(五)——T-SQL编程之存储过程
周五了,祝大家周末愉快. 之前一直在写SQL server的分享,今天再来个T-SQL编程中的存储过程. 存储过程 存储过程(procedure)类似于C语言中的函数,用来执行管理任务或应用复杂的业务 ...
- canvas图表详解系列(1):柱状图
本章建议学习时间4小时 学习方式:详细阅读,并手动实现相关代码(如果没有canvas基础,需要先学习前面的canvas基础笔记) 学习目标:此教程将教会大家如何使用canvas绘制各种图表,详细分解步 ...
- redis的发布订阅模式pubsub
前言 redis支持发布订阅模式,在这个实现中,发送者(发送信息的客户端)不是将信息直接发送给特定的接收者(接收信息的客户端),而是将信息发送给频道(channel),然后由频道将信息转发给所有对这个 ...
- 【学习】js学习笔记---字符串对象
一.属性 1.length 字符串的长度,且不区分中英文的字节. 示例代码: var str="abcdefghijklmn"; var str1="中文汉语" ...
- 安装阿里Java代码规约插件
概述 2017年10月14日杭州云栖大会,Java代码规约扫描插件全球首发仪式正式启动,规范正式以插件形式公开走向业界,引领Java语言的规范之路.目前,插件已在云效公有云产品中集成,立即体验!(云效 ...
- C#方法中参数ref和out的解析
一.C#方法中参数类型 有4种参数类型,有时候很难记住它们的不同特征,下图对它们做一个总结,使之更容易比较和对照. 二.C#方法中的参数 1.值参数 使用值参数,通过复制实参的值到形参的方式把数据传递 ...
- ubuntu16.04 配置opensips服务器并编译pjsip测试
一.版本相关 1) ubuntu版本: 16.04 2) opensips版本:2.1.2 3) pjsip版本 :2.5.5 4) ffmpeg版本:3.3.4 5) sdl版本:2.0 6) vs ...
- LeetCode 599. Minimum Index Sum of Two Lists (从两个lists里找到相同的并且位置总和最靠前的)
Suppose Andy and Doris want to choose a restaurant for dinner, and they both have a list of favorite ...
- LeetCode 532. K-diff Pairs in an Array (在数组中相差k的配对)
Given an array of integers and an integer k, you need to find the number of unique k-diff pairs in t ...
- LeetCode 88. Merge Sorted Array(合并有序数组)
Given two sorted integer arrays nums1 and nums2, merge nums2 into nums1 as one sorted array. Note:Yo ...