第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】
雷达跟随说明:注意深度摄像头的 USB 延长线,可能会对雷达扫描造成影响, 所以在雷达跟随前,把深度摄像头的 USB 延长线取下。另外雷达跟随范围大概是前方 50cm 和 120°内扫描到的物体都可以跟随。
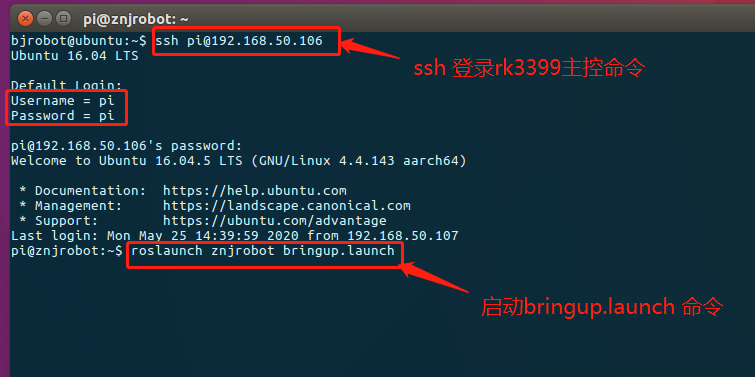
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch。
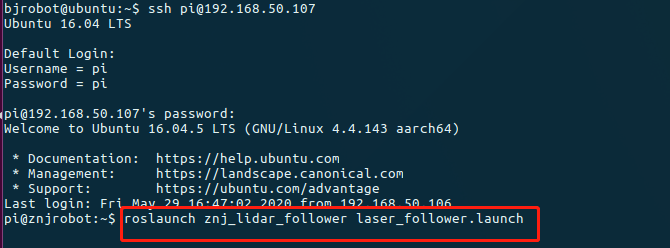
2.在虚拟机端再打开一个终端,ssh 过去启动 roslaunch znj_lidar_follower laser_follower.launch
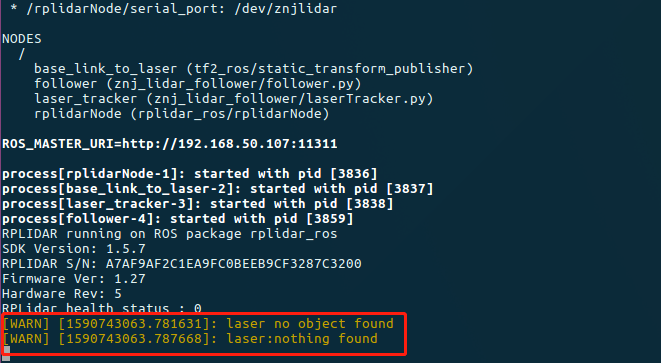
3.如下图出现的警告是因为没有识别物体,此时站过去小车前面,前后左右行走即可实现雷达跟随。
第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第七章节 BJROBOT 选择区域自主构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动r ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch. 2.在虚拟机端启动 roslaunch opencv_ ...
- 第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.再打开一个终端,ssh 过去主控端启动 rosl ...
随机推荐
- App自动化《元素定位方式、元素操作、混合应用、分层设计、代码方式执行Pytest 命令》
坚持原创输出,点击蓝字关注我吧 作者:清菡 博客:oschina.云+社区.知乎等各大平台都有. 目录 一.App 元素定位方式 二.元素操作 三.测试混合应用 四.以代码的方式执行 Pytest 命 ...
- PyQt(Python+Qt)学习随笔:字体writingSystem、ProportionalFonts、MonospacedFonts的含义以及QFontComboBox字体组合框详解
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 专栏:PyQt入门学习 老猿Python博文目录 一.引言 在介绍QFontComboBox之前,我们先简单介绍一下字体 ...
- PyQt(Python+Qt)学习随笔:工具箱(QToolBox)编程使用的步骤及示例代码
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 使用toolBox开发应用时,通过Designer设计ui界面时,只能在Designer中设计too ...
- PyQt(Python+Qt)学习随笔:Qt Designer中主窗口对象的dockOptions属性
dockOptions属性代表主窗口对浮动部件停靠的反应,其类型为枚举类型QMainWindow.DockOptions.相关取值及含义如下: 这些枚举值可以组合使用,仅控制如何在QMainWindo ...
- 如何实现 token 加密(来自github每日一题)
需要一个secret(随机数) 后端利用secret和加密算法(如:HMAC-SHA256)对payload(如账号密码)生成一个字符串(token),返回前端 前端每次request在header中 ...
- XJOI contest 1590
首先 热烈庆祝"CSP-S 2020全国开放赛前冲刺模拟训练题1"圆满结束!!! 感谢大毒瘤周指导的题目.题目还是很不错的,部分分设置的也比较合理,各种神仙随便 \(\text{A ...
- 数据结构—— Trie (前缀树)
实现一个 Trie (前缀树),包含 插入, 查询, 和 查询前缀这三个操作. Trie trie = new Trie(); trie.insert("apple"); trie ...
- springmvc中ModelAttribute注解应用在参数中
可以用@ModelAttribute来注解方法参数或方法.带@ModelAttribute创建的参数对象会被添加到Model对象中.注解在参数上时,可以从Form表单或URL参数中获取参数并绑定到mo ...
- easyUI验证框赋值
下面来看看easyui的各种验证框赋值的方式: <input name="userId" id="userId" class="easyui-n ...
- [打基础]OI/ACM基本功&一些小功能的实现&一些错误(持续更新)
基本功 前导0 如题,有时候需要把3输出成03这样子,可以调用 cout.width(x); ,x表示以几位,用 cout.fill(x); 来给出前导填充的内容,一般x以char的形式给出 例如可以 ...