高德AR & 车道级导航技术演进与实践
- 技术背景
- 当前进展
- 核心技术
- 对周边环境实时的感知能力
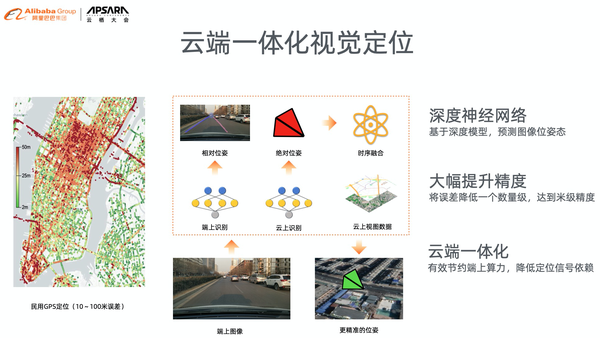
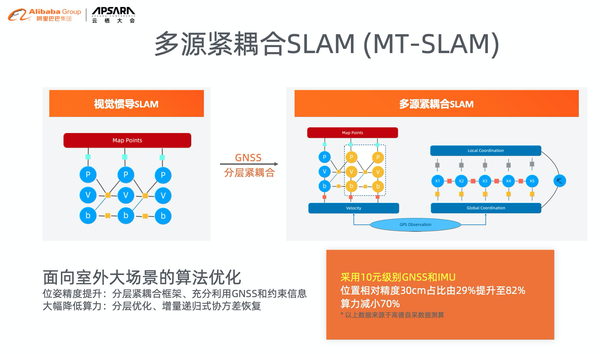
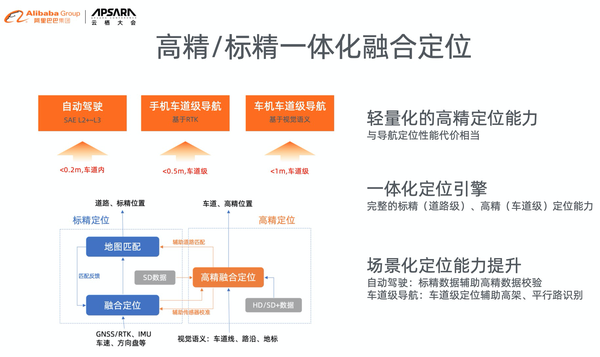
- 车道级的高精定位能力
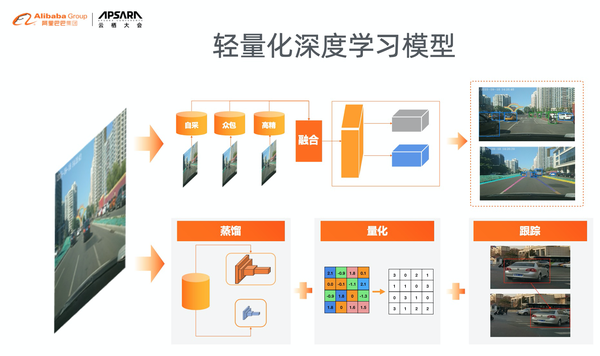
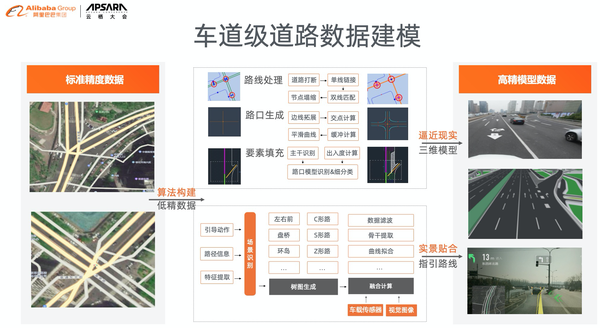
- 道路数据的精细化表达能力

高德AR & 车道级导航技术演进与实践的更多相关文章
- 【大数据和云计算技术社区】分库分表技术演进&最佳实践笔记
1.需求背景 移动互联网时代,海量的用户每天产生海量的数量,这些海量数据远不是一张表能Hold住的.比如 用户表:支付宝8亿,微信10亿.CITIC对公140万,对私8700万. 订单表:美团每天几千 ...
- 分库分表技术演进&最佳实践
每个优秀的程序员和架构师都应该掌握分库分表,这是我的观点. 移动互联网时代,海量的用户每天产生海量的数量,比如: 用户表 订单表 交易流水表 以支付宝用户为例,8亿:微信用户更是10亿.订单表更夸张, ...
- MOT北京站 | 卓越研发之路:亿万级云端架构演进
随着IT行业技术周期的快速迭代,如何在激烈的市场竞争中突出重围成为了不少技术人的困惑.除了要保持良好的技术视野外,多向IT行业精英学习他们分享的实战经验,也可让技术提升,达到事半功倍的效果. MOT北 ...
- PouchContainer 容器技术演进助力阿里云原生升级
点击下载<不一样的 双11 技术:阿里巴巴经济体云原生实践> 作者 | 杨育兵(沈陵) 阿里巴巴高级技术专家 我们从 2016 年开始在集团推广全面的镜像化容器化,今年是集团全面镜像化容器 ...
- 为什么 K8s 在阿里能成功?| 问底中国 IT 技术演进
作者: 曾凡松 阿里云云原生应用平台高级技术专家 张振 阿里云云原生应用平台高级技术专家 导读:本文描述了阿里巴巴在容器管理领域的技术演进历程,解读了为什么 K8s 最终能够大获成功的原因,以及到今年 ...
- 汇聚优质AR应用开发者,技术助力AR领域繁荣生态
本文分享于HMS Core开发者论坛<EasyAR--汇聚优质AR应用开发者,技术助力AR领域繁荣生态>采访文字稿 EasyAR空间计算平台为应用开发者提供稳定建图.定位能力和完善工具链, ...
- jquery 实现两级导航菜单
主要用于运维系统, 对界面要求不高的场合. 深深感到自己页面设计能力弱爆了,只能借鉴一下了, 交互逻辑还可以胜任一点. 直接贴代码: 1. HTML 页面及 JS 交互, 注意引入 Jquery ...
- 基于深度学习的目标检测技术演进:R-CNN、Fast R-CNN,Faster R-CNN
基于深度学习的目标检测技术演进:R-CNN.Fast R-CNN,Faster R-CNN object detection我的理解,就是在给定的图片中精确找到物体所在位置,并标注出物体的类别.obj ...
- 阿里云杨敬宇:边缘计算行业通识与阿里云ENS的技术演进之路
近日,阿里云杨敬宇在CSDN阿里云核心技术竞争力在线峰会上进行了<5G基础设施-阿里云边缘计算的技术演进之路>主题演讲,针对5G时代下,行业和技术的趋势.边缘计算产业通识以及阿里云边缘计算 ...
随机推荐
- 图解 K8s 核心概念和术语
我第一次接触容器编排调度工具是 Docker 自家的 Docker Swarm,主要解决当时公司内部业务项目部署繁琐的问题,我记得当时项目实现容器化之后,花在项目部署运维的时间大大减少了,当时觉得这玩 ...
- 焦大:做seo需要的三心二意
http://www.wocaoseo.com/thread-92-1-1.html 读过一些外国人写的教程之后,愈发觉得国外人写的教程甚是有趣,比起国内学习的课本来,真是不可同日而语. ...
- 淘宝ios端弹窗-2020年3月25日
- Springboot整合Spring Cloud Kubernetes读取ConfigMap,支持自动刷新配置
1 前言 欢迎访问南瓜慢说 www.pkslow.com获取更多精彩文章! Docker & Kubernetes相关文章:容器技术 之前介绍了Spring Cloud Config的用法,但 ...
- qqmini
QQ玩一玩最新调试方法 https://blog.csdn.net/zyw_java/article/details/83686645 LayaBox 接入QQ玩一玩 轻游戏流程 https://bl ...
- IntelliJ IDEA远程Debug Linux的Java程序,找问题不要只会看日志了
1 前言 欢迎访问南瓜慢说 www.pkslow.com获取更多精彩文章! 我们习惯于在本地开发的时候debug,能快速定位与解决问题,那部署在服务器上是不是就没有办法了呢?只能通过查看日志来定位? ...
- Stack (30)(模拟栈,输出中间数用set)
Stack is one of the most fundamental data structures, which is based on the principle of Last In Fir ...
- 深入了解Netty【三】Netty概述
1.简介 Netty是一个异步事件驱动的网络应用程序框架,用于快速开发可维护的高性能协议服务器和客户端. Netty是一个NIO客户端服务器框架,它支持快速.简单地开发协议服务器和客户端等网络应用程序 ...
- HTML5 Drag & Drop
一定要区分不同事件产生的对象 源元素 属性:draggable = "true" 事件: ondragstart:开始拖拽 ondragend:拖拽结束 目标元素 事件: ondr ...
- 使用StringUtils需要引用的依賴
<dependency> <groupId>commons-lang</groupId> <artifactId>commons-lang</ar ...