基于lio-sam框架,教你如何进行回环检测及位姿计算
摘要:本篇主要解析lio-sam框架下,是如何进行回环检测及位姿计算的。
本文分享自华为云社区《lio-sam框架:回环检测及位姿计算》,作者:月照银海似蛟龙 。
前言
图优化本身有成形的开源的库,例如
- g2o
- ceres
- gtsam
lio-sam 中就是 通过 gtsam 库 进行 图优化的,其中约束因子就包括回环检测因子
本篇主要解析lio-sam框架下,是如何进行回环检测及位姿计算的。
Pose Graph的概念
用一个图(Graph 图论)来表示SLAM问题
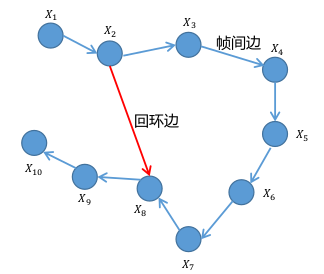
图中的节点来表示机器人的位姿 二维的话即为 (x,y,yaw)
两个节点之间的边表示两个位姿的空间约束(相对位姿关系以及对应方差或线性矩阵)
边分为了两种边
- 帧间边:连接的前后,时间上是连续的
- 回环边:连接的前后,时间上是不连续的,但是直接也是两个位姿的空间约束
构建了回环边才会有误差出现,没有回环边是没有误差的
图优化的基本思想:
出现回环边,有了误差之后.构建图,并且找到一个最优的配置(各节点的位姿),让预测与观测的误差最小
一旦形成回环即可进行优化消除误差
里程积分的相对位姿视为预测值 图上的各个节点就是通过里程(激光里程计\轮速里程计)积分得到的
回环计算的相对位姿视为观测值 图上就是说通过 X2和X8的帧间匹配作为观测值
图优化要干的事:
构建图并调整各节点的位姿,让预测与观测的误差最小
回环检测及位姿计算
在点云匹配之后,可以来看回环检测部分的代码了
这部分的代码入口在 main函数中
std::thread loopthread(&mapOptimization::loopClosureThread, &MO);
单独开了一个回环检测的线程
下面来看loopClosureThread这个函数
void loopClosureThread()
{
if (loopClosureEnableFlag == false)
return;
如果不需要进行回环检测,那么就退出这个线程
ros::Rate rate(loopClosureFrequency);
设置回环检测的频率 loopClosureFrequency默认为 1hz
没有必要太频繁
while (ros::ok())
{
rate.sleep();
performLoopClosure();
visualizeLoopClosure();
}
设置完频率后,进行一个while的死循环。
执行完一次就必须sleep一段时间,否则该线程的cpu占用会非常高,通过performLoopClosure visualizeLoopClosure 执行回环检测
下面来看performLoopClosure 函数的具体内容
void performLoopClosure()
{
if (cloudKeyPoses3D->points.empty() == true)
return;
如果没有关键帧,就没法进行回环检测了
就直接退出
mtx.lock();
*copy_cloudKeyPoses3D = *cloudKeyPoses3D;
*copy_cloudKeyPoses6D = *cloudKeyPoses6D;
mtx.unlock();
把存储关键帧额位姿的点云copy出来,避免线程冲突 cloudKeyPoses3D就是关键帧的位置 cloudKeyPoses6D就是关键帧的位姿
if (detectLoopClosureExternal(&loopKeyCur, &loopKeyPre) == false)
首先看一下外部通知的回环信息
if (detectLoopClosureDistance(&loopKeyCur, &loopKeyPre) == false)
return;
然后根据里程计的距离来检测回环
如果还没有则直接返回
来看detectLoopClosureDistance 函数的具体内容
int loopKeyCur = copy_cloudKeyPoses3D->size() - 1;
int loopKeyPre = -1;
检测最新帧是否和其它帧形成回环,取出最新帧的索引
auto it = loopIndexContainer.find(loopKeyCur);
if (it != loopIndexContainer.end())
return false;
检查一下较晚帧是否和别的形成了回环,如果有就算了
因为当前帧刚刚出现,不会和其它帧形成回环,所以基本不会触发
kdtreeHistoryKeyPoses->setInputCloud(copy_cloudKeyPoses3D);
把只包含关键帧位移信息的点云填充kdtree
kdtreeHistoryKeyPoses->radiusSearch(copy_cloudKeyPoses3D->back(), historyKeyframeSearchRadius, pointSearchIndLoop, pointSearchSqDisLoop, 0);
根据最后一个关键帧的平移信息,寻找离他一定距离内的其它关键帧
historyKeyframeSearchRadius 搜索范围 15m
for (int i = 0; i < (int)pointSearchIndLoop.size(); ++i)
{
遍历找到的候选关键帧
int id = pointSearchIndLoop[i];
if (abs(copy_cloudKeyPoses6D->points[id].time - timeLaserInfoCur) > historyKeyframeSearchTimeDiff)
{
loopKeyPre = id;
break;
}
历史帧,必须比当前帧间隔30s以上
必须满足时间上超过一定阈值,才认为是一个有效的回环
historyKeyframeSearchTimeDiff 时间阈值 30s
如果时间上满足要做就找到了历史回环帧,那么赋值id 并且 break
一次找一个回环帧就行了
if (loopKeyPre == -1 || loopKeyCur == loopKeyPre)
return false;
如果没有找到回环或者回环找到自己身上去了,就认为是本次回环寻找失败
*latestID = loopKeyCur;
*closestID = loopKeyPre;
return true;
}
至此则找到了当真关键帧和历史回环帧
赋值当前帧和历史回环帧的id
如果在一个地方静止不动的时候,那么按照这个逻辑也会形成关键帧,可以通过以关键帧序列号的方式加以改进
如果检测回环存在了,那么则可以进行下面内容,就是计算检测出这两帧的位姿变换
pcl::PointCloud<PointType>::Ptr cureKeyframeCloud(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr prevKeyframeCloud(new pcl::PointCloud<PointType>());
声明当前关键帧的点云
声明历史回环帧周围的点云(局部地图)
loopFindNearKeyframes(cureKeyframeCloud, loopKeyCur, 0);
当前关键帧把自己取了出来
来看 loopFindNearKeyframes 这个函数
void loopFindNearKeyframes(pcl::PointCloud<PointType>::Ptr& nearKeyframes, const int& key, const int& searchNum)
{
for (int i = -searchNum; i <= searchNum; ++i)
{
searchNum 是搜索范围 ,遍历帧的范围
int keyNear = key + i;
找到这个 idx
if (keyNear < 0 || keyNear >= cloudSize )
continue;
如果超出范围了就算了
*nearKeyframes += *transformPointCloud(cornerCloudKeyFrames[keyNear], ©_cloudKeyPoses6D->points[keyNear]);
*nearKeyframes += *transformPointCloud(surfCloudKeyFrames[keyNear], ©_cloudKeyPoses6D->points[keyNear]);
否则吧对应角点和面点的点云转到世界坐标系下去
if (nearKeyframes->empty())
return;
如果没有有效的点云就算了
pcl::PointCloud<PointType>::Ptr cloud_temp(new pcl::PointCloud<PointType>());
downSizeFilterICP.setInputCloud(nearKeyframes);
downSizeFilterICP.filter(*cloud_temp);
*nearKeyframes = *cloud_temp;
吧点云下采样
然后会到之前的地方:
loopFindNearKeyframes(prevKeyframeCloud, loopKeyPre, historyKeyframeSearchNum);
回环帧把自己周围一些点云取出来,也就是构成一个帧局部地图的一个匹配问题
historyKeyframeSearchNum 25帧
if (cureKeyframeCloud->size() < 300 || prevKeyframeCloud->size() < 1000)
return;
如果点云数目太少就算了
if (pubHistoryKeyFrames.getNumSubscribers() != 0)
publishCloud(&pubHistoryKeyFrames, prevKeyframeCloud, timeLaserInfoStamp, odometryFrame);
把局部地图发布出来供rviz可视化使用
现在有了当前关键帧投到地图坐标系下的点云和历史回环帧投到地图坐标系下的局部地图,那么接下来就可以进行两者的icp位姿变换求解
static pcl::IterativeClosestPoint<PointType, PointType> icp;
使用简单的icp来进行帧到局部地图的配准
icp.setMaxCorrespondenceDistance(historyKeyframeSearchRadius*2);
设置最大相关距离
historyKeyframeSearchRadius 15m
icp.setMaximumIterations(100);
最大优化次数
icp.setTransformationEpsilon(1e-6);
单次变换范围
icp.setEuclideanFitnessEpsilon(1e-6);
icp.setRANSACIterations(0);
残差设置
icp.setInputSource(cureKeyframeCloud);
icp.setInputTarget(prevKeyframeCloud);
设置两个点云
pcl::PointCloud<PointType>::Ptr unused_result(new pcl::PointCloud<PointType>());
icp.align(*unused_result);
执行配准
if (icp.hasConverged() == false || icp.getFitnessScore() > historyKeyframeFitnessScore)
return;
检测icp是否收敛 且 得分是否满足要求
if (pubIcpKeyFrames.getNumSubscribers() != 0)
{
pcl::PointCloud<PointType>::Ptr closed_cloud(new pcl::PointCloud<PointType>());
pcl::transformPointCloud(*cureKeyframeCloud, *closed_cloud, icp.getFinalTransformation());
publishCloud(&pubIcpKeyFrames, closed_cloud, timeLaserInfoStamp, odometryFrame);
}
把修正后的当前点云发布供可视化使用
correctionLidarFrame = icp.getFinalTransformation();
获得两个点云的变换矩阵结果
Eigen::Affine3f tWrong = pclPointToAffine3f(copy_cloudKeyPoses6D->points[loopKeyCur]);
取出当前帧的位姿
Eigen::Affine3f tCorrect = correctionLidarFrame * tWrong;
将icp结果补偿过去,就是当前帧的更为准确的位姿结果
pcl::getTranslationAndEulerAngles (tCorrect, x, y, z, roll, pitch, yaw);
将当前帧补偿后的位姿 转换成 平移和旋转
gtsam::Pose3 poseFrom = Pose3(Rot3::RzRyRx(roll, pitch, yaw), Point3(x, y, z));
gtsam::Pose3 poseTo = pclPointTogtsamPose3(copy_cloudKeyPoses6D->points[loopKeyPre]);
将当前帧补偿后的位姿 转换成 gtsam的形式
From 和 To相当于帧间约束的因子,To是历史回环帧的位姿
gtsam::Vector Vector6(6);
float noiseScore = icp.getFitnessScore();
noiseModel::Diagonal::shared_ptr constraintNoise = noiseModel::Diagonal::Variances(Vector6);
使用icp的得分作为他们的约束噪声项
loopIndexQueue.push_back(make_pair(loopKeyCur, loopKeyPre));//两帧索引
loopPoseQueue.push_back(poseFrom.between(poseTo));//当前帧与历史回环帧相对位姿
loopNoiseQueue.push_back(constraintNoise);//噪声
将两帧索引,两帧相对位姿和噪声作为回环约束 送入对列
loopIndexContainer[loopKeyCur] = loopKeyPre;
保存已经存在的约束对
总结
lio-sam回环检测的方式
构建关键帧,将关键帧的位姿存储。以固定频率进行回环检测。每次处理最新的关键帧,通过kdtree寻找历史关键帧中距离和时间满足条件的一个关键帧。然后就认为形成了回环。
形成回环后,历史帧周围25帧,构建局部地图,与当前关键帧进行icp匹配求解位姿变换。
lio-sam 认为里程计累计漂移比较小,所以通过距离与时间这两个概念进行的关键帧的回环检测。
基于lio-sam框架,教你如何进行回环检测及位姿计算的更多相关文章
- segMatch:基于3D点云分割的回环检测
该论文的地址是:https://arxiv.org/pdf/1609.07720.pdf segmatch是一个提供车辆的回环检测的技术,使用提取和匹配分割的三维激光点云技术.分割的例子可以在下面的图 ...
- 一个基于深度学习回环检测模块的简单双目 SLAM 系统
转载请注明出处,谢谢 原创作者:Mingrui 原创链接:https://www.cnblogs.com/MingruiYu/p/12634631.html 写在前面 最近在搞本科毕设,关于基于深度学 ...
- 基于Java Netty框架构建高性能的部标808协议的GPS服务器
使用Java语言开发一个高质量和高性能的jt808 协议的GPS通信服务器,并不是一件简单容易的事情,开发出来一段程序和能够承受数十万台车载接入是两码事,除去开发部标808协议的固有复杂性和几个月长周 ...
- 基于Typecho CMS框架开发大中型应用
基于Typecho CMS框架开发大中型应用 大中型应用暂且定义为:大于等于3个数据表的应用!汗吧! Typecho原本是一款博客系统,其框架体系有别于市面上一般意义MVC框架,主体代码以自创的Wid ...
- 基于AForge.Net框架的扑克牌识别
原文:基于AForge.Net框架的扑克牌识别 © 版权所有 野比 2012 原文地址:点击查看 作者:Nazmi Altun Nazmi Altun著,野比 译 下载源代码 - 148.61 KB ...
- revel框架教程之CSRF(跨站请求伪造)保护
revel框架教程之CSRF(跨站请求伪造)保护 CSRF是什么?请看这篇博文“浅谈CSRF攻击方式”,说的非常清楚. 现在做网站敢不防CSRF的我猜只有两种情况,一是没什么人访问,二是局域网应用.山 ...
- 基于BrokerPattern服务器框架
基于BrokerPattern服务器框架 RedRabbit 经典网游服务器架构 该图省略了专门用途的dbserver.guildserver等用于专门功能的server,该架构的优点有: l Log ...
- 手工搭建基于ABP的框架(2) - 访问数据库
为了防止不提供原网址的转载,特在这里加上原文链接: http://www.cnblogs.com/skabyy/p/7517397.html 本篇我们实现数据库的访问.我们将实现两种数据库访问方法来访 ...
- 手工搭建基于ABP的框架 - 工作单元以及事务管理
一个业务功能往往不只由一次数据库请求(或者服务调用)实现.为了功能的完整性,我们希望如果该功能执行一半时出错,则撤销前面已执行的改动.在数据库层面上,事务管理实现了这种完整性需求.在ABP中,一个完整 ...
- 基于Kafka Connect框架DataPipeline可以更好地解决哪些企业数据集成难题?
DataPipeline已经完成了很多优化和提升工作,可以很好地解决当前企业数据集成面临的很多核心难题. 1. 任务的独立性与全局性. 从Kafka设计之初,就遵从从源端到目的的解耦性.下游可以有很多 ...
随机推荐
- 通过Lambda函数的方式获取属性名称
前言: 最近在使用mybatis-plus框架, 常常会使用lambda的方法引用获取实体属性, 避免出现大量的魔法值. public List<User> listBySex() { L ...
- 使用 Ant Design Vue 你可能会遇到的14个问题
公司有一个新需求,在原来项目基础上开发,项目中使用 Ant Design Vue,版本是 1.X ,在此记录下遇到的问题:对于没有使用过或者使用程度不深的同学来说,希望可以帮助你在开发中遇到问题时有个 ...
- IDEA工具第二篇:自定义Java方法注释模板
网上搜索类似的文章有很多,但是一味的复制粘贴总会出现各种奇葩问题,最后然并卵!今天特意自己研究琢磨一下,将最终结果分享给大家,100%亲测可用. 一.说明 想必大家都用过Eclipse的方法注释生成, ...
- 关于 React 性能优化和数栈产品中的实践
我们是袋鼠云数栈 UED 团队,致力于打造优秀的一站式数据中台产品.我们始终保持工匠精神,探索前端道路,为社区积累并传播经验价值. 本文作者:的卢 引入 在日常开发过程中,我们会使用很多性能优化的 A ...
- Util应用框架 UI 开发快速入门
本文是Util应用框架 Angular UI 开发快速入门教程. Util前端技术概述 Util 应用框架目前仅支持用于开发管理后台的 UI. 本文介绍了 Util UI 的技术特点和功能支持. UI ...
- 猜单词游戏(c++)
#include<iostream> #include<string> #include<fstream> #include<cstdlib> #inc ...
- [Python急救站课程]猴子吃桃问题
问题:猴子第一天摘下若干个桃子,当即吃了一半,还不过瘾,又多吃了一个:第二天早上又将剩下的桃子吃掉一半,又多吃了一个.以后,每天早上都吃了前一天剩下的一半多一个.到了第五天早上想再吃时,见只剩下一个桃 ...
- SPI扩展点在业务中的使用及原理分析
1 什么是SPI SPI 全称Service Provider Interface.面向接口编程中,我们会根据不同的业务抽象出不同的接口,然后根据不同的业务实现建立不同规则的类,因此一个接口会实现多个 ...
- 使用Slurm集群进行分布式图计算:对Github网络影响力的系统分析
本文分享自华为云社区<基于Slurm集群的分布式图计算应用实践:Github协作网络影响力分析>,作者:yd_263841138 . 1. 引言 Slurm(Simple Linux Ut ...
- 吉特日化MES系统&生产工艺控制参数对照表
吉特日化MES生产工艺参数对照表 工艺编号 PROCE_BASE_TIMER 工艺名称 定时器 工艺说明 主要用于生产工艺步骤过程计时 参数编号 参数名称 参数描述 Prop_Timer_Enable ...