UART学习之路(三)基于STM32F103的USART实验
关于STM32串口的资料可以在RM0008 Reference Manual中找到,有中文版的资料。STM32F103支持5个串口,选取USART1用来实验,其对应的IO口为PA9和PA10。这次的实验基于ALIENTEK的开发板,开发版通过CH340G实现将串口转成USB。因此需要做好一些准备工作。
1.PC端安装Keil v5 MDK开发工具;
2.PC端安装CH340G的驱动;
3.PC端安装ATK XCOM串口收发程序
STM32的串口编程思路:
1.串口时钟设置和复位;
2.选取发射口和接收口的引脚,并设置GPIO端口参数;
3.串口参数的初始化(完成波特率、字长、奇偶校验、收发模式等参数的设置);
4.初始化NVIC(Nested Vectored Interrupt Controller,内嵌向量中断控制器);
5.开启中断和使能串口
代码如下:
//main.c:
#include "uart.h" int main()
{
uart1_init();
while()
{
}
}
//USART.c
#include "uart.h" #define USART1_REC_LEN 256 u8 Uart1_RevBuf_Tail = ;//接收缓冲区尾部
u8 Uart1_RevBuf[USART1_REC_LEN];//接收缓冲区数组 void uart1_init()
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE);
USART_DeInit(USART1); //USART1端口配置
//UASART_TX PA9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA9
//USART1_RX PA10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA10 //USART1 初始化设置
USART_InitStructure.USART_BaudRate = ;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1 //Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启相关中断
USART_Cmd(USART1, ENABLE); //使能串口1 } //串口1中断服务程序
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断
{ Uart1_RevBuf[Uart1_RevBuf_Tail] = USART_ReceiveData(USART1);//读取接收到的数据,将尾标后移
USART_SendData(USART1,Uart1_RevBuf[Uart1_RevBuf_Tail]);//发送接收到的数据
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET)
{}
Uart1_RevBuf_Tail++;
if(Uart1_RevBuf_Tail>USART1_REC_LEN-)
{
Uart1_RevBuf_Tail = ;
}
}
}
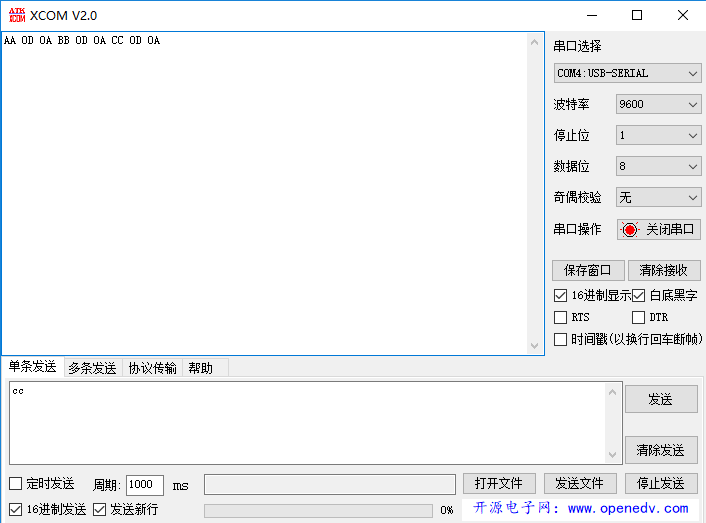
主函数非常简单,就是调用uart_init()然后等待串口1的接收中断触发。串口1的中断服务函数功能是:当PC端发送据后,将接收到的数据重新发回给PC机。uart_init()的功能是完成串口的配置。在接收数据的时候设置了一个容量位256的数据缓冲区Uart1_RevBuf,用来存放接收到的数据。
程序的运行结果如下。分别发送AA,BB,CC后PC端接收到了AA 0D 0A BB 0D 0A CC 0D 0A,0D和0A分别表示回车和换行。说明结果正确。
在实际应用中,上位机可以通过多个串口和多个从设备进行通信,因此在串口通信的时候要自行规定一个通信协议。比如由1.头,2.设备号,3.数据长度,4.数据,5.结束位,6.间隔位组成一个数据包。根据协议编写解包函数。解包函数的大致思路就是将接收到的数据一步一步的进行判断,最终完成解出数据的功能。
1.数据包定义:
头:0xAB,设备号:0x01(一号设备),数据长度:0x08(8位数据),数据位:DATA,结束位:0xFF,间隔位:0xFF 0xFF
2.解包函数:
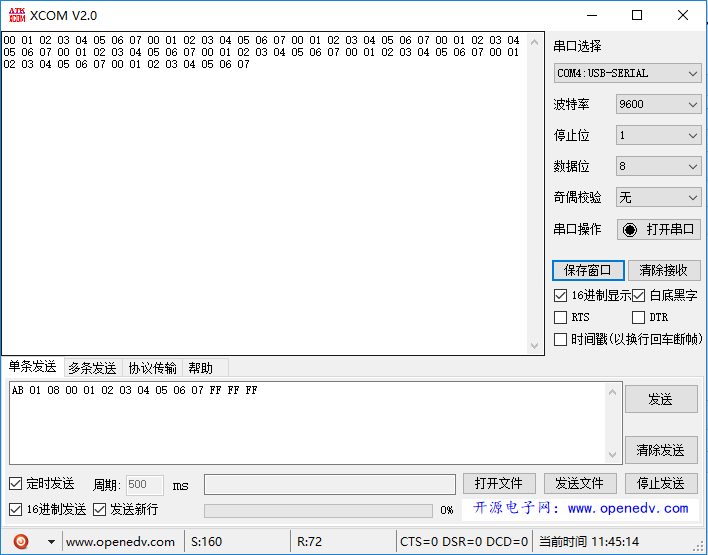
PC机发送一个数据包:AB 01 08 00 01 02 03 04 05 06 07 FF FF FF,解包函数能够将数据00 01 02 03 04 05 06 07取出来并再次发送给PC机。PC机将数据发送给STM32F103,触发接收中断,将数据存入接收缓冲区中,解包函数从缓冲区的头部开始检索,完成数据分析,取出数据。代码如下:
#include "stm32f10x.h"
#include <stdio.h> #define Usart1RecLength 256 u8 Uart1_RevBuf_Tail = ;
u8 Uart1_RevBuf_Head = ;
u8 Uart1_RevBuf[Usart1RecLength];
u8 RecState = ;
u8 TemplateData;
u8 DataLength = ;
u8 Data[]={}; typedef struct
{
u8 StartDataError;
u8 DeviceDataError;
u8 LengthDataError;
u8 StopDataError; u8 DataReady;
}DataFrameFlag; DataFrameFlag USART1_FrameFlags; void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断
{
Uart1_RevBuf[Uart1_RevBuf_Tail] = USART_ReceiveData(USART1); //读取接收到的数据
Uart1_RevBuf_Tail++;
if(Uart1_RevBuf_Tail > Usart1RecLength-)
{
Uart1_RevBuf_Tail = ;
}
}
} void RecDataAnalysis()
{
u8 i = ;
if(Uart1_RevBuf_Head != Uart1_RevBuf_Tail)//判断是否有数据
{
TemplateData = Uart1_RevBuf[Uart1_RevBuf_Head];//从数据缓冲区取数据
Uart1_RevBuf_Head ++;
if(Uart1_RevBuf_Head > Usart1RecLength-)
{
Uart1_RevBuf_Head = ;
} USART1_FrameFlags.DeviceDataError = ;
USART1_FrameFlags.StopDataError = ;
USART1_FrameFlags.LengthDataError = ;
USART1_FrameFlags.StartDataError = ; switch(RecState)
{
case :
if(TemplateData == 0xAB)//头
{
RecState = ;
}
else
{
RecState = ;
USART1_FrameFlags.StartDataError = ;
}
break;
case :
if(TemplateData == 0x01)//设备号
{
RecState = ;
}
else
{
RecState = ;
USART1_FrameFlags.DeviceDataError = ;
}
break;
case :
if(TemplateData == 0x08)//数据位
{
RecState = ;
}
else
{
RecState = ;
USART1_FrameFlags.LengthDataError = ;
}
break;
case ://转存数据
if(DataLength == )
{
RecState = ;
USART1_FrameFlags.DataReady = ;
}
else if(DataLength != )
{
Data[-DataLength] = TemplateData;
DataLength = DataLength -;
}
break;
case :
if(TemplateData == 0xFF)//尾部
{
RecState = ;
DataLength = ;
}
else
{
for(i=;i < ;i++)
{
Data[i] = ;
}
RecState = ;
DataLength = ;
USART1_FrameFlags.StopDataError = ;
USART1_FrameFlags.DataReady = ;
}
break;
default:
for(i=;i < ;i++)
{
Data[i] = ;
}
RecState = ;
DataLength = ;
break;
}
}
} void Resend()//测试用重发数据函数
{
u8 i = ;
if(USART1_FrameFlags.DataReady == )
{
for(i=;i<;i++)
{
USART_SendData(USART1,Data[i]);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
USART1_FrameFlags.DataReady = ;
}
}
}
函数RecDataAnalysis()完成数据解包,函数Resend()在解包函数准备好数据将数据回发给PC机。结构体DataFrameFlag的作用是当数据出现错误时完成报错,是可选功能,程序中给了一种思路,未做调试。结果如下:
UART学习之路(三)基于STM32F103的USART实验的更多相关文章
- zigbee学习之路(十三):基于协议栈的Usart 实验
一.前言 这次实验我们来学习基于zigbee的串口通信实验,揭开zigbee神秘的面纱,让大家可以用zigbee协议编制属于自己的程序,这次实验只是串口发送数据,并没有进行无线的数据传输,为的是使大家 ...
- UART学习之路(一)基本概念
第一篇博客,首先记录一下这一个多星期来的学习内容. UART学习之路第一篇,是UART的基本概念介绍.后续会用STM32F103的串口与PC机通信.最后使用Verilog HDL写出串口发送模块和接收 ...
- 学习之路三十九:新手学习 - Windows API
来到了新公司,一开始就要做个程序去获取另外一个程序里的数据,哇,挑战性很大. 经过两周的学习,终于搞定,主要还是对Windows API有了更多的了解. 文中所有的消息常量,API,结构体都整理出来了 ...
- UART学习之路(四)VerilogHDL实现的简单UART,VIVADO下完成仿真
用VerilogHDL实现UART并完成仿真就算是对UART整个技术有了全面的理解,同时也算是Verilog入门了.整个UART分为3部分完成,发送模块(Transmitter),接收模块(Recei ...
- Redis——学习之路三(初识redis config配置)
我们先看看config 默认情况下系统是怎么配置的.在命令行中输入 config get *(如图) 默认情况下有61配置信息,每一个命令占两行,第一行为配置名称信息,第二行为配置的具体信息. ...
- zigbee学习之路(三):按键的控制
一.前言 通过前一次的实验,相信大家都已经对cc2530程序的编写有了一定的认识,这次我们来操作和实验的是cc2530上的按键模块. 二.原理分析 我们先来看一下按键的原理图: 根据原理图我们可以得出 ...
- 学习之路三十二:VS调试的简单技巧
这段时间园子里讲了一些关于VS的快捷键以及一些配置技巧,挺好的,大家一起学习,一起进步. 这段时间重点看了一下关于VS调试技巧方面的书,在此记录一下学习的内容吧,主要还是一些比较浅显的知识. 1. 调 ...
- python学习之路 三:字符编码
本节重点 彻底掌握字符编码之前的转换关系 掌握 python2 vs python3 上编码的区别 掌握 python2 和python3 上bytes,str 的区别 补充知识点:三元运算 三元运 ...
- 交互原型设计软件axure rp学习之路(三)
(三)Axure rp元件的触发事件 l OnClick(点击时): 鼠标点击事件,除了动态面板的所有的其他元件的点击时触发.比如点击按钮. l OnMouseEnter(鼠标移入时): 鼠标进入 ...
随机推荐
- 【Leetcode】【Easy】Isomorphic Strings
Given two strings s and t, determine if they are isomorphic. Two strings are isomorphic if the chara ...
- Mvnw 简介
Mvnw 简介 8月 17, 2016 | Nix.Huang 背景 maven是一款非常流行的java项目构建软件,它集项目的依赖管理.测试用例运行.打包.构件管理于一身,是我们工作的好帮手,m ...
- Java学习---程序设计_基础题[1]
180813 补全没有的答案! 0. 数组排序大全[冒泡/选择/快速/插入] package com.ftl; import java.io.BufferedReader; import java.i ...
- 沉淀,再出发:XPath的理解和使用
沉淀,再出发:XPath的理解和使用 一.前言 在很多查找的场合之下,我们需要使用正则表达式和其他的查找工具来进行内容的匹配和查找,特别是对于xml文件,我们可以使用xpath等工具来进行查找,通 ...
- 整合VIM和Graphviz,并且使用本办法实现实时预览
在编程或是整理知识的时候一直苦于没有一款可以帮助理清思路的工具. 在网上苦寻良久,终于找到了一款可心可意的小软件 —— Graphviz. 折腾了一番,终于可以凑合着用了. 现将折腾的成果记录于此以作 ...
- [DBSDFZOJ 多校联训] Password
Password password.in/.out 描述 你来到了一个庙前,庙牌上有一个仅包含小写字母的字符串 s. 传说打开庙门的密码是这个字符串的一个子串 t,并且 t 既是 s 的前缀又是 s ...
- zeromq 笔记
一. 当执行zmq_bind后会进入mute state,直到有进入或者出去的连接发生才会进入ready state 在mute state状态下会根据不同的套接字类型决定是丢弃消息还是阻塞 可参考z ...
- JS实现图片上传之前先预览
<html xmlns="http://www.w3.org/1999/xhtml"> <head id="Head1" runat=&quo ...
- python文件读写模式 --- r,w,a,r+,w+,a+,rb,wb
要了解文件读写模式,需要了解几种模式的区别,以及对应指针 r : 读取文件,若文件不存在则会报错 w: 写入文件,若文件不存在则会先创建再写入,会覆盖原文件 a : 写入文件,若文件不存在则会先创建再 ...
- 【NOIP2017】宝藏
题目描述 参与考古挖掘的小明得到了一份藏宝图,藏宝图上标出了 \(n\) 个深埋在地下的宝藏屋, 也给出了这 \(n\) 个宝藏屋之间可供开发的 \(m\) 条道路和它们的长度. 小明决心亲自前往挖掘 ...