STM32 HAL库学习系列第5篇 定时器TIM---编码器接口模式配置
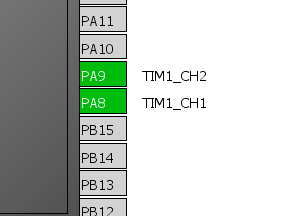
cube基本配置,外设开启编码器,串口2
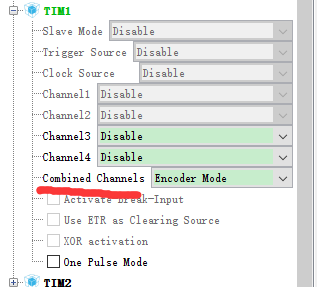
可能大家在设置的时候有这个错误
错误:error: #20: identifier "TIM_ICPOLARITY_BOTHEDGE" is undefined
意思是,高级、通用定时器不能用BothEdge,只有基本定时器才能用BothEdge
针对具体的芯片举几个例子:基本都是大同小异
F4系列:
/* 编码器初始化及使能编码器模式 */
ENCODER_TIMx_Init();
HAL_TIM_Encoder_Start(&htimx_Encoder, TIM_CHANNEL_ALL);
/* 获取捕获值并计算转速 */
CaptureNumber = ( int16_t )__HAL_TIM_GET_COUNTER(&htimx_Encoder)+OverflowCount*;
printf("输入捕获值:%d \n",CaptureNumber);
// 4 : 使用定时器编码器接口捕获AB相的上升沿和下降沿,一个脉冲*4.
// 11:编码器线数(转速一圈输出脉冲数)
// 34:电机减数比,内部电机转动圈数与电机输出轴转动圈数比,即减速齿轮比
printf("电机实际转动速度:%0.2f(圈/s)\n",(float)CaptureNumber///);
__HAL_TIM_SET_COUNTER(&htimx_Encoder,);
F1系列 输出方向与速度
/**
* 函数功能: 系统滴答定时器中断回调函数
* 输入参数: 无
* 返 回 值: 无
* 说 明: 每发生一次滴答定时器中断进入该回调函数一次
*/
void HAL_SYSTICK_Callback(void)
{
static uint32_t count=;
if(start_flag) // 等待脉冲输出后才开始计时
{
time_count++; // 每1ms自动增一
if(time_count==) // 1s
{
/* Get the current direction */
uwDirection = __HAL_TIM_IS_TIM_COUNTING_DOWN(&htimx_Encoder);
CaptureNumber=__HAL_TIM_GET_COUNTER(&htimx_Encoder); printf("当前编码器定时器计数方向:%d\n",uwDirection);
printf("输入捕获值:%d\n",CaptureNumber);
printf("1s内编码器计数值:%d\n",CaptureNumber>=count?CaptureNumber-count:CaptureNumber+-count); // 11:编码器线数(转速一圈输出脉冲数)
// 34:电机减数比,内部电机转动圈数与电机输出轴转动圈数比,即减速齿轮比
printf("电机实际转动速度:%0.2f(圈/s)\n",(float)(CaptureNumber>=count?CaptureNumber-count:CaptureNumber+-count)///);
count=CaptureNumber;
time_count=;
}
}
}
函数应用:
这个函数很好用,在电机控制时使用很多
__HAL_TIM_SET_COUNTER() 可以设置计数初值为需要的值,默认是0
增量式编码器四倍频:
确定编码器是多少线的,假设定时器分频为0; 则定时器计数为390*4 = 1560
中断配置:编码器模式是可以不需要中断的,主要是定时器1和8的配置
注意:这个是我实际遇到的问题,遇到的可以参考
编码器是否是OC(集电极开路)门,接了上拉没有,没有需要接上啦,如果不使用Z信号,需要把外部中断清零的那部分代码去掉
标准库配置可以参考:https://blog.csdn.net/wang328452854/article/details/50579832
STM32 HAL库学习系列第5篇 定时器TIM---编码器接口模式配置的更多相关文章
- STM32 HAL库学习系列第6篇---定时器TIM 级联配置
应用情景 使用定时器配置编码器模式,发现STM32只有两个定时器是32位,16位的测量值不够用,发现是可以使用两个16位定时器级联为32位的. 我是在使用编码器计数电机转速时使用,但是最终实现的效果不 ...
- STM32 HAL库学习系列第7篇---定时器TIM 输入捕获功能
测量脉冲宽度或者测量频率 基本方法 1.设置TIM2 CH1为输入捕获功能: 2.设置上升沿捕获: 3.使能TIM2 CH1捕获功能: 4.捕获到上升沿后,存入capture_buf[0], ...
- STM32 HAL库学习系列第4篇 定时器TIM----- 开始定时器与PWM输出配置
基本流程: 1.配置定时器 2.开启定时器 3.动态改变pwm输出,改变值 HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_1); 函数总结: __HAL_TIM ...
- STM32 HAL库学习系列第8篇---回调函数总结
普通函数与回调函数的区别:就是ST将中断封装,给使用者的API,就是标准库的中断函数 对普通函数的调用: 调用程序发出对普通函数的调用后,程序执行立即转向被调用函数执行,直到被调用函数执行完毕后,再返 ...
- STM32 HAL库学习系列第1篇 ADC配置 及 DAC配置
ADC工作均为非阻塞状态 轮询模式 中断模式 DMA模式 库函数: HAL_StatusTypeDef HAL_ADC_Start(ADC_HandleTypeDef* hadc);//轮询模式,需放 ...
- STM32 HAL库学习系列第3篇 常使用的几种延时方式
1 自带的hal_delay 函数 毫秒级延迟 void HAL_Delay(__IO uint32_t Delay) { uint32_t tickstart = HAL_GetTick( ...
- STM32 HAL库学习系列第2篇 GPIO配置
GPIO 库函数 基本就是使用以下几个函数 GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); void H ...
- STM32 HAL库学习系列---定时器TIM 输入捕获功能
基本方法 1.设置TIM2 CH1为输入捕获功能: 2.设置上升沿捕获: 3.使能TIM2 CH1捕获功能: 4.捕获到上升沿后,存入capture_buf[0],改为捕获下降沿: 5.捕获到下降沿后 ...
- 【书籍连载】《STM32 HAL 库开发实战指南—基于F7》-第一章
从今天起,每天开始连载一章<STM32 HAL 库开发实战指南—基于F7>.欢迎各位阅读.点评.学习. 第1章 如何使用本书 1.1 本书的参考资料 本书参考资料为:<STM32 ...
随机推荐
- Zabbix 3.0 for Ubuntu 14.04 LTS 安装
准备工作 apt-get install gettextapt-get install unzipapt-get install rar一.安装主程序 代码: 全选wget http://repo.z ...
- 一个简单的使用matplotlib作图的例子
#使用matplotlib作图 import numpy as np import matplotlib.pyplot as plt #x = np.linspace(start, stop, num ...
- HTTP协议图--与 HTTP 协作的 Web 服务器
HTTP 通信时,除客户端和服务器外,还有一些用于协助通信的应用程序.如下列出比较重要的几个:代理.缓存.网关.隧道.Agent 代理. 1.代理 代理 HTTP 代理服务器是 Web 安全.应用 ...
- linux服务器nginx的卸载和安装
刚接触的linux服务器上,nginx配置乱的有点令人发指,就把老的卸载了重新装一下. 卸载 linux有一系列的软件管理器,比如常见的linux下的yum.Ubuntu下的apt-get等等.通过这 ...
- 使用python 操作liunx的svn,方案一
在服务器中要做几个操作,使用命令操作svn,svn文件的创建,svn文件更新,并把指定demo路径,移动到创建的文件夹中,进行提交, # -*- coding:utf-8 -*- import pys ...
- Kali-linux物理访问攻击
物理访问攻击与提升用户的权限类似.即当一个普通用户登录到系统中,破解本地其他用户账户的密码.在Linux中,普通用户可以通过su命令代替其他用户执行某些操作,意味着该用户能够在Linux/Unix系统 ...
- java把行政区划放到一个节点树形中
作者原创:转载请注明出处.https://www.cnblogs.com/yunqing/p/9486923.html 先放数据,t_city表 //津京冀地区行政区划数据 SET FOREIGN_K ...
- 【SP2713 GSS4 - Can you answer these queries IV】 题解
题目链接:https://www.luogu.org/problemnew/show/SP2713 真暴力啊. 开方你开就是了,开上6次就都没了. #include <cmath> #in ...
- COSTA Cross-layer Optimization for Sketch-based笔记与感受
Main Idea 网络测量在sdn中十分重要,使用sketch的方法需要消耗大量硬件资源,占用其他重要功能的资源,无法容纳更多的测量任务.基于sketch的测量方法有两个特性:基于sketch的测量 ...
- linux内核追踪(trace)(QEMU+gdb)
1.引言 Linux内核是一个很大的模块,如果只是看源码有时会难以理解Linux内核的一些代码设计情况,如果可以结合Linux内核运行同时阅读源码再好不过,本文大致介绍Linux内核追踪方式,采用工具 ...