ROS Navigation中的map_server地图包功能和使用
博客参考 http://wiki.ros.org/map_server 和 https://www.ncnynl.com/archives/201708/1897.html
1. 安装map_server
sudo apt-get install ros-kinetic-map-server
2. 具体使用说明
map_server使得地图的数据变成 ros 的service 可以被调用。其中以两种方式存储。一个是yaml文件,他存储了数据的元数据。一个是image file 他编码了地图的占据性情况。其中 image file 中白色像素是空的,黑色像素是被占据的。色彩或者灰色的是被接受的。
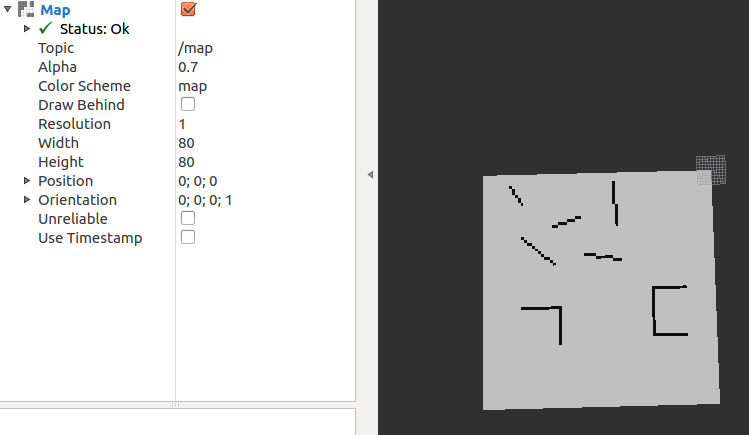
如上可以看到map_server是一个ROS 节点,可以从磁盘读取地图并使用ROS service提供地图,此图是rviz订阅/map服务可视化之后的结果
map_server概要
- map_server包提供了一个map_server ROS 节点, 该节点通过ROS 服务器方式提供地图数据。
- 该包还提供了map_saver命令行utility, 使用该工具可将动态创建的地图保存成文件。
地图格式
- 该包中的工具使用过的地图会被存储在两个文件中。
- 一个是YAML格式的文件描述地图meta-data并命名image文件。
- 另一个image文件用来编码occupancy data。
Image 格式
Image 指定包含occupancy data的image文件路径,可以是绝对路径,也可以是相对于YAML文件的对象路径
白色像素表示自由,黑色像素格表示占用,两种颜色之间的单元表示未知。
彩色和灰度图像都适合,但大多数地图是灰度图像(尽管它们存储的好像是以彩色的形式),YAML文件的阈值划分为3类;阈值是在map_server内部完成的。
比较阈值参数时,图像单元占用概率的计算如下:occ = (255 - color_avg) / 255.0 (color_avg是用8位数表示的来自于所有通道的平均值)。
如果图像是24位颜色,一个单元的颜色0x0a0a0a有一个0.96的概率,这是一个完全占用((255-(0*16+10))/255.0=0.96)。
如果像素颜色是0xeeeeee,则占用概率是0.07, 这意味着几乎没有被占用。
当ROS消息通信时,占用度被表示为范围为[0-100]的整数,0的意思完全是自由的,100的意思完全占用,特殊值-1完全未知。
Image data 通过 SDL_Image库读取,取决于sdl_image在特定平台上提供的内容,且支持多种格式。
一般来说,Image data 支持大多数流行的图像格式。
一个必须要注意的例外是PNG格式在OS X平台上不能被支持。
YAML格式
image: testmap.png
resolution: 0.1
origin: [0.0, 0.0, 0.0]
occupied_thresh: 0.65
free_thresh: 0.196
negate: 0
需要的字段:
image:指定包含occupancy data的image文件路径; 可以是绝对路径,也可以是相对于YAML文件的对象路径 。
resolution:地图分辨率,单位是meters/pixel 。
origin:图中左下角像素的二维位姿,如(x,y,yaw),yaw逆时针旋转(yaw=0表示没有旋转)。系统的很多部分现在忽略yaw值。
occupied_thresh:像素占用率大于这个阈值则认为完全占用。
free_thresh:像素占用率比该阈值小被则认为完全自由。
negate:无论白色或黑色,占用或自由,语义应该是颠倒的(阈值的解释不受影响)。
negate : Whether the white/black free/occupied semantics should be reversed (interpretation of thresholds is unaffected)
命令行工具
(1) Map_server
map_server是一个ROS 节点,可以从磁盘读取地图并使用ROS service提供地图。
目前实现的map_server可将地图中的颜色值转化成三种占用值: 自由 (0), 占用 (100), 和 未知 (-1).
这个工具的未来版本可能会使用0和100之间的值来表达更细致的占用度。
命令语法
rosrun map_server map_server mymap.yaml
可视化需要,roscore 和 rviz的配合
- 注意:map data可以通过指定topic或者 service来提取。service的方式最后可能要被废弃。
- 发布的主题
[map_metadata (nav_msgs/MapMetaData)][3]
- 通过指定话题获取地图的metadata
[map (nav_msgs/OccupancyGrid)][4]
通过指定话题获取地图
服务
static_map ([nav_msgs/GetMap][5])
通过该服务来获取地图
参数
~frame_id (string, default: "map")
- 设置已发布的地图的坐标系(The frame to set in the header of the published map. )
(2) map_saver
map_saver可以把地图保存到磁盘。 例如:从SLAM mapping 服务中保存.
命令语法
rosrun map_server map_saver [-f mapname]
Map_saver获取地图数据,并把它写到map.pgm和map.yaml。
使用-f选项为指定地图的存放目录和名称。
- 命令示例
rosrun map_server map_saver -f /home/xxx/map/mm
/home/xxx/map/为地图目录路径,mm为地图名称,生成后得到mm.yaml和mm.pgm两个文件
订阅话题
map (nav_msgs/OccupancyGrid)
- 通过指定话题来获取地图
参考资料:
- http://wiki.ros.org/map_server
- http://blog.csdn.net/x_r_su/article/details/53392272
- http://blog.csdn.net/w383117613/article/details/46860075
ROS Navigation中的map_server地图包功能和使用的更多相关文章
- 利用HBuilder开发基于MUI的H5+ app中使用百度地图定位功能
定位功能有两种方法: 首先要初始化内置地图: var map = new plus.maps.Map("map"); 这里黄色的map是html里面的id: <div id= ...
- Android 百度地图开发(一)--- 申请API Key和在项目中显示百度地图
标签: Android百度地图API Key 分类: Android 百度地图开发(2) 最近自己想研究下地图,本来想研究google Map,但是申请API key比较坑爹,于是从百度地 ...
- 如何在BI中增加“路线地图”并进行数据分析?
随着客户的需求越来越"百变",最近在做大屏设计的葡萄陷入了困境. 近期客户提出的需求是想在BI工具中增加 "路线地图"展示功能并进行数据分析. 不仅如此,这个& ...
- ros navigation stack 各个包的作用
nav_core 该包定义了整个导航系统关键包的接口函数,包括base_global_planner, base_local_planner以及recovery_behavior的接口.里面的函数全是 ...
- (十八)WebGIS中清空功能和地图定位功能的设计以及实现
文章版权由作者李晓晖和博客园共有,若转载请于明显处标明出处:http://www.cnblogs.com/naaoveGIS/. 1.背景 当地图中增加了很多元素后,对不同的元素需要进行一定的控制,最 ...
- AngularJS进阶(十九)在AngularJS应用中集成百度地图实现定位功能
在AngularJS应用中集成百度地图实现定位功能 注:请点击此处进行充电! 前言 根据项目需求,需要实现手机定位功能,考虑到百度业务的强大能力,遂决定使用百度地图第三方服务. 添加第三方模块的步骤与 ...
- map_server地图服务器
http://wiki.ros.org/map_server 概述 map_server提供map_server ROS节点,它提供地图数据作为一个ROS服务器.也提供map_saver命令行功能,能 ...
- 在ionic/cordova中使用百度地图插件
在ionic项目中,如果想实现定位功能,可以使用ng-cordova提供的cordova-plugin-geolocation. 但由于高墙的缘故,国内andorid环境下,此插件不起作用(ios环境 ...
- 在ROS(indigo)中读取手机GPS用于机器人定位~GPS2BT在ubuntu和window系统下的使用方法~
在ROS(indigo)中读取手机GPS用于机器人定位~GPS2BT在ubuntu和window系统下的使用方法~ 不需要额外购买GPS设备. 将手机GPS数据通过蓝牙传输给计算机使用,当然通过类似方 ...
随机推荐
- pyalgotrade入门
入门代码解析: from pyalgotrade import strategyfrom pyalgotrade.barfeed import yahoofeed #继承自BacktestingStr ...
- hasura graphql 角色访问控制
目前从官方文档以及测试可以看出不加任何header的请求访问的是所有的数据,对于具有访问 控制的请求需要添加请求头,实际生产的使用需要集合web hook 的实现访问控制. 参考配置 访问请求 目前数 ...
- TASKER 定制你的手机让它在办公室时屏幕 30 分钟才灭
TASKER 定制你的手机让它在办公室时屏幕 30 分钟才灭 因为到的办公室,手机一直是充电的,不想屏幕太快关关掉,所以使用 TASKER 做了一个条件. 当 WIFI 连接到公司 WIFI 且充电中 ...
- 【python】Python框架、库和软件资源大全
很多来自世界各地的程序员不求回报的写代码为别人造轮子.贡献代码.开发框架.开放源代码使得分散在世界各地的程序员们都能够贡献他们的代码与创新. Python就是这样一门受到全世界各地开源社区支持的语言. ...
- 汇编_指令_FLAGS
标志名 标志 1 标志 0 OF (溢出标志) OV ...
- Bootstrap-Plugin:过渡效果(Transition)插件
ylbtech-Bootstrap-Plugin:过渡效果(Transition)插件 1.返回顶部 1. Bootstrap 过渡效果(Transition)插件 过渡效果(Transition)插 ...
- [Android] 开发第七天
在另一台机器上安装 Android-Studio ,结果卡在了 Gradle 的下载界面上,网上各种方案都试了一遍,最终解决办法是: 然后新建了一个 App ,创建了新的签名并上传到手机上,安装时直接 ...
- crs_register/crs_unregister 注册与移除RAC服务 --zhuanzai
crs_register命令主要是将资源注册到CRS.该方法通常结合crs_stat -p 或者crs_profile先创建配置文件.同时crs_register也具有更新CRS的功能.本文将描述cr ...
- JMS消息服务模型
JMS--仅仅是一种规范,一种接口规约,一种编程模型.类似的JPA,JSR等 场景: 1.多个系统之间交互,实现可以采取RPC,但是交互复杂,基本就是点对点的方式 2.其实交互就是消息,而JMS就是消 ...
- Django ORM-02
6.ForeignKey 相关操作 1.正向查找 正向查找:那么什么是正向查找,我们知道对于一对多或者多对一的情况,我们一般将ForeignKey设置在多的一边,比如我们的书籍与出版社一般是多对一的, ...