Air530Z GPS/北斗定位模块_设计指导手册_V1.2
下载PDF版本:
Air530Z_定位模块_设计指导手册_V1.2.pdf
@
1. 模块整体说明
Air530Z模块是一款高性能BDS/GNSS多模卫星导航模块,支持多种卫星导航系统,包括中国的北斗卫星导航系统BDS,美国的GPS,俄罗斯的GLONASS,并实现多系统联合定位。
Air530Z 和 Air530 的封装完全兼容,区别在于Air530Z 采用的是中科微的AT6558R 方案,而Air530采用的是国科的GK9501方案。
从Air530切换到Air530Z 注意事项:http://doc.openluat.com/article/2296/0
Air530Z 内部集成了3.3V有源天线供电电路和检测电路;
Air530Z模块的尺寸极小,只有12.9X9.9X2.3mm,可以方便的嵌入到各种应用场景。
2. 资料下载
3. 模块性能
| 类别 | 指标项 | 典型值 | 单位 |
|---|---|---|---|
| 定位时间 [测试条件1] | 纯硬件冷启动 | ≤32 | s |
| 定位时间 [测试条件1] | 纯硬件热启动 | <1 | s |
| 定位时间 [测试条件1] | 纯硬件重新捕获 | <1 | s |
| 定位时间 [测试条件1] | 软件辅助A-GNSS(秒定位) | <5 | s |
| 灵敏度 [测试条件2] | 冷启动 | -148 | dBm |
| 灵敏度 [测试条件2] | 热启动 | -156 | dBm |
| 灵敏度 [测试条件2] | 重新捕获 | -160 | dBm |
| 灵敏度 [测试条件2] | 跟踪 | -162 | dBm |
| 精度 [测试条件3] | 水平定位精度 | 2 | m |
| 精度 [测试条件3] | 速度精度 | 0.1 | m/s |
| 精度 [测试条件3] | 授时精度 | 30 | ns |
| 功耗 [测试条件4] | 捕获电流值 VCC=3.3V | 33.3 | mA |
| 功耗 [测试条件4] | 跟踪电流值 VCC=3.3V | 29.2 | mA |
| 功耗 (电池备份电流) | VCC=0 VBACKUP=3.3V | 9 | uA |
| 功耗 (休眠模式电流) 对于2021.4.15 之前生产的模块 | VCC=3.3V ON_OFF=0 | 6.4 | mA |
| 功耗 (休眠模式电流) 对于2021.4.15 之后生产的模块 | VCC=3.3V ON_OFF=0 | 31 | uA |
| 工作温度 | -35℃- 85℃ | ||
| 储存温度 | -55℃- 100℃ | ||
| 湿度 | 5% - 95% |
注:以上结果为GPS/北斗双模工作模式
[测试条件1]: 接收卫星个数大于6,所有卫星信号强度为-130dBm,测试10次取平均值,定位误差小于10米。
[测试条件2]:外接LNA噪声系数0.8,接收卫星个数大于6,五分钟之内锁定或者不失锁条件下的接收信号强度值。
[测试条件3]:开阔没有遮挡环境,连续24小时开机测试,50%CEP。
[测试条件4]:接收卫星个数大于6,所有卫星信号强度为-130dBm。
4.模块管脚图

| Pin脚编号 | Pin脚定义 | Pin脚描述 |
|---|---|---|
| 1 | GPS_ANT | GPS天线输入 |
| 2 | GND | 地 |
| 3 | ON_OFF | 输入,内部上拉。拉低关闭模块,正常工作保持高电平或悬空; |
| 4 | VCC | 主电源,供电输入范围2.7-3.6V,推荐采用3.3V供电 |
| 5 | VBACKUP | 备份电源的输入,推荐外接一个可充电的3V纽扣电池或法拉电容,以支持热启动定位;若不需要热启动功能,该管脚可悬空;注意钮扣电池或法拉电容的最大可充电电压应大于 VCC+0.3V |
| 6 | RESERVED | 保留管脚,悬空处理 |
| 7 | RESERVED | 保留管脚,悬空处理 |
| 8 | TXD | 串口TX,输出GPS NMEA格式定位数据,默认波特率9600bps,最大支持256000bps |
| 9 | RXD | 串口RX |
| 10 | RESERVED | 保留管脚,悬空处理 |
| 11 | BDS_GLONASS | 工作模式选择,高电平或悬空时为BDS+GPS; 低电平时为GPS+GLONASS。 |
| 12 | GND | 地 |
| 13 | 1PPS | 授时管脚,One pulse per second |
| 14 | GND | 地 |
5.参考设计电路
参考电路:最简模式
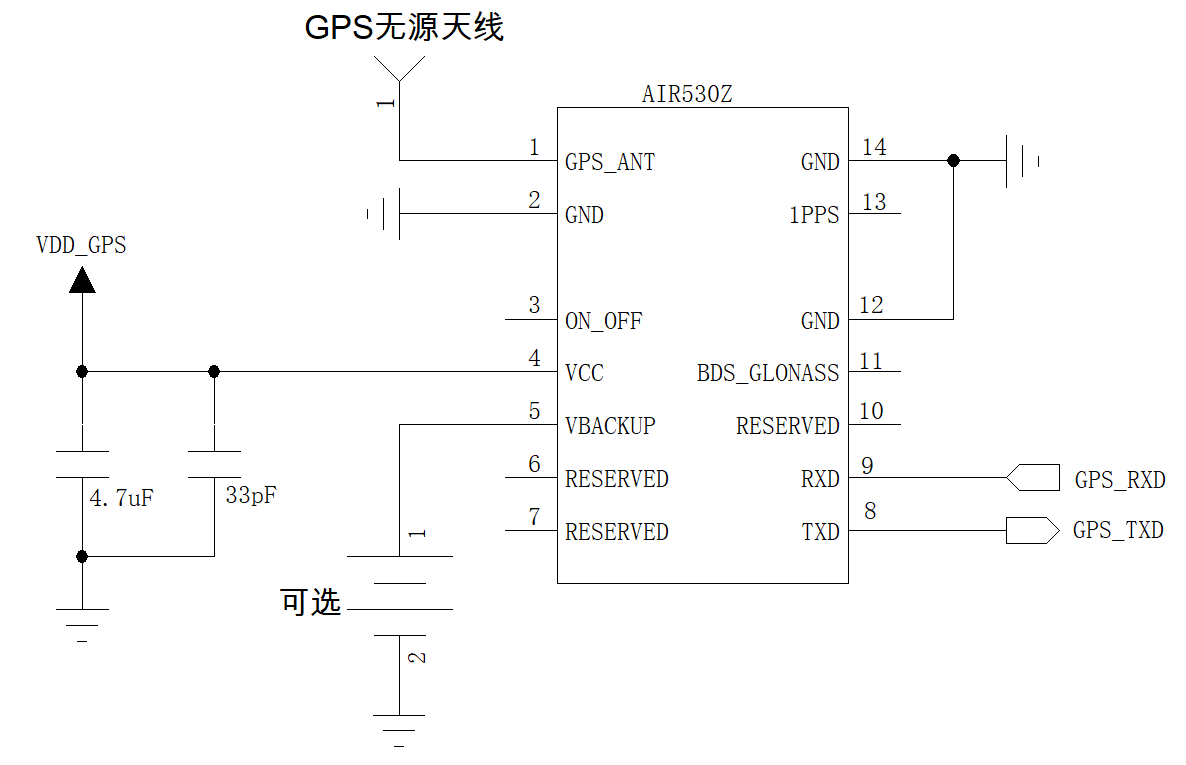
设计注意事项
- VCC供电电压范围2.7-3.6V,典型3.3V供电,如果需要热启动快速定位,则VBACKUP外接一个可充电的钮扣电池或者法拉电容,注意钮扣电池或法拉电容的最大可充电电压应大于 VCC+0.3V。模块内部集成了涓流充电电路和防反向二极管。如果不需要热启动, VBACKUP可悬空。
- 模块尽量靠近GPS天线放置,天线走线保持50欧姆阻抗匹配,走线尽量短,避免锐角。
- GPS 天线可以使用25X25X4mm 尺寸的无源陶瓷天线。
- 串口TXD,RXD是 3.3V TTL 电平,用户可用此串口接收定位信息数据。
- 本模块是温度敏感设备,温度剧烈变化会导致其性能降低,使用中尽量远离高温器件与大功率发热器件。
6.GPS天线
GPS天线可根据需要选择无源天线或有源天线,有源天线相比无源天线效果好,但是成本高。
6.1 无源天线
如果采用无源天线,建议天线与模块之间的走线尽可能的短,最理想的情况是GPS模块直接放置在天线的背面,使模块的天线焊盘和GPS天线馈点之间零距离,如下图所示:

6.2 有源天线
Air530Z模块内部集成了3.3V有源天线供电电路和检测电路, 可以给外部有源天线馈电。并根据馈电电流的大小,指示有源天线的状态。有源天线检测电路还提供了短路保护,通过限制给有源天线馈电的电流,保护芯片和有源天线不被损坏。检测电路定义了三种状态,当电流小于设定值时,指示天线开路;当电流大于设定值时,指示天线正常;当电流过大或者发生短路时,指示天线过流。
天线接入的默认最小检测电流为 2.5mA,短路保护的限流电流默认为 50mA。
采用有源天线时要注意有源天线的供电范围,当使用的有源天线的供电是3.3V时,模块可以直接给有源天线进行馈电,参考电路如下所示:
3.3V有源天线参考电路

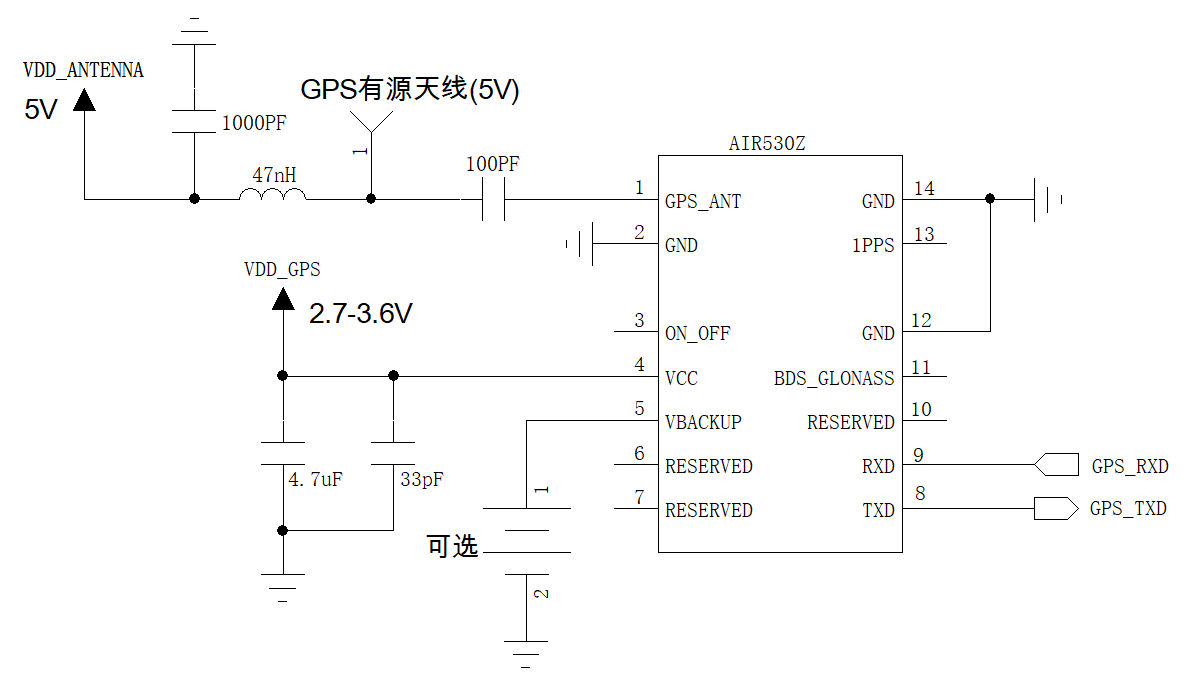
当采用的有源天线供电为5V时,需使用外部供电,此时需串接一颗47nH电感,并联一颗1000pF的电容,同时还需要加一颗100pF 的隔直电容,参考电路如下所示:
5V有源天线参考电路
7. 常见问题
- 怎么 Air530Z 模块输出的 UTC 时间有的时候不准确,会有差不多6秒的延迟?
这是因为 Air530Z 支持北斗三,在空旷地带可以搜索到二十多颗卫星,NMEA的数据量比以前大了很多,模块需要每秒钟推送出所有的这些数据,而模块默认的串口波特率比较低,只有9600bps,导致模块无法在1秒钟内把NMEA数据全部推送出来,部分数据就会被模块缓存起来,直到缓存不够用时才会丢弃部分不重要的数据。用户看到的现象就是UTC时间不准确,一开始会延迟1秒,慢慢的会增加到延迟6秒左右。
如下两种办法都解决这个问题:
- 把模块的波特率配置成115200bps,配置指令:$PCAS01,5*19
- 停止输出部分用不到的 NMEA 语句
| 信息 | CAS03 |
|---|---|
| 描述 | 设置要求输出或停止输出的 NMEA 语句。 |
| 类型 | 输入 |
| 格式 | $PCAS03,nGGA,nGLL,nGSA,nGSV,nRMC,nVTG,nZDA,nANT,nDHV,nLPS,res1,r es2,nUTC,nGST,res3,res4,res5,nTIM*CS |
| 示例 | $PCAS03,1,1,1,1,1,1,1,1,0,0,,,1,1,,,,1*33 |
| 字段 | 名称 | 格式 | 参数说明 |
|---|---|---|---|
| 1 | $PCAS03 | 字符串 | 消息 ID,语句头 |
| 2 | nGGA | 数值 | GGA 输出频率, 语句输出频率是以定位更新率为基准的,n(0~9)表示每 n 次定位输出一次, 0 表示不输出该语句,空则保持原有配置。 |
| 3 | nGLL | 数值 | GLL 输出频率,同 nGGA |
| 4 | nGSA | 数值 | GSA 输出频率,同 nGGA |
| 5 | nGSV | 数值 | GSV 输出频率,同 nGGA |
| 6 | nRMC | 数值 | RMC 输出频率,同 nGGA |
| 7 | nVTG | 数值 | VTG 输出频率,同 nGGA |
| 8 | nZDA | 数值 | ZDA 输出频率,同 nGGA |
| 9 | nANT | 数值 | ANT 输出频率,同 nGGA |
| 10 | nDHV | 数值 | DHV 输出频率,同 nGGA |
| 11 | nLPS | 数值 | LPS 输出频率, 同 nGGA |
| 12 | res1 | 数值 | 保留 |
| 13 | res2 | 数值 | 保留 |
| 14 | nUTC | 数值 | UTC 输出频率, 同 nGGA |
| 15 | nGST | 数值 | GST 输出频率, 同 nGST |
| 16 | res3 | 数值 | 保留 |
| 17 | res4 | 数值 | 保留 |
| 18 | res5 | 数值 | 保留 |
| 19 | nTIM | 数值 | TIM(PCAS60) 输出频率, 同 nGGA |
| 20 | CS | 16 进制数值 | 校验和,$和*之间(不包括$和*) 所有字符的异或结果 |
| 21 | 字符 | 回车与换行符 |
8. 模块外形尺寸
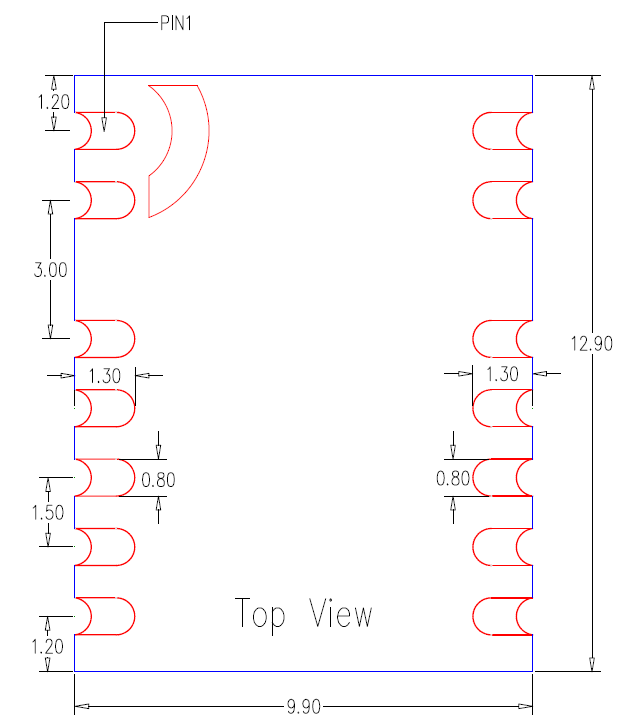
模块尺寸为12.9mm*9.9mm*2.3mm;
9.模块推荐PCB封装尺寸图
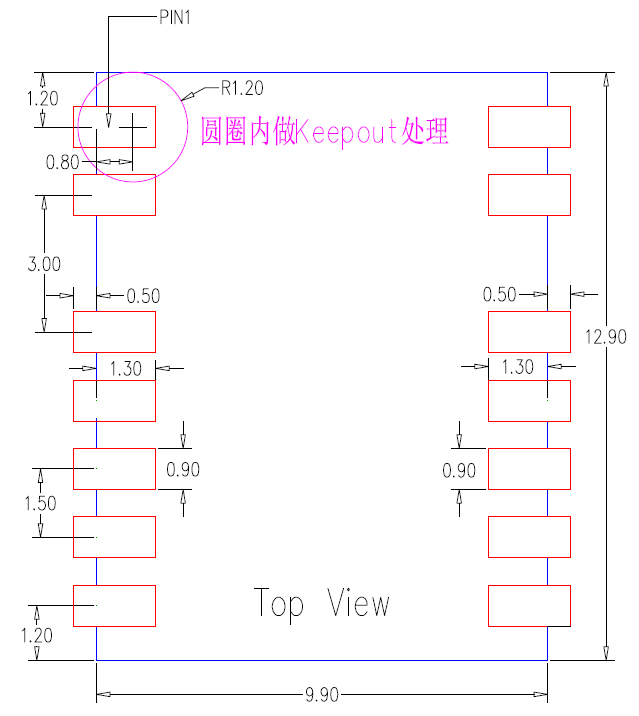
说明:
为方便邮票孔焊接,邮票孔焊盘需外延至少0.5mm,模块封装尺寸建议为12.9mm*10.9mm;
Air530Z封装下载链接如下:
Air530Z_原理图PCB封装.zip
10. NMEA0183协议
AIR530Z模块支持NMEA 0183 V4.1协议并兼容以前版本,关于NMEA 0183 V4.1的详细信息请参照NMEA 0183 V4.1官方文档。
10.1 NMEA 自定义消息
CAS01
| 信息 | CAS01 |
|---|---|
| 描述 | 设置串口通信波特率。 |
| 类型 | 输入 |
| 格式 | $PCAS01,br*CS |
| 示例 | $PCAS01,1*1D |
| 字段 | 名称 | 格式 | 参数说明 |
|---|---|---|---|
| 1 | $PCAS01 | 字符串 | 消息 ID,语句头 |
| 2 | br | 数字 | 波特率配置。 0=4800bps 1=9600bps 2=19200bps 3=38400bps 4=57600bps 5=115200bps |
| 3 | CS | 16 进制数值 | 校验和,$和*之间(不包括$和*)所有字符的异或结果 |
| 4 | 字符 | 回车与换行符 |
CAS02
| 信息 | CAS02 |
|---|---|
| 描述 | 设置定位更新率。 |
| 类型 | 输入 |
| 格式 | $PCAS02,fixInt*CS |
| 示例 | $PCAS02,1000*2E |
| 字段 | 名称 | 格式 | 参数说明 |
|---|---|---|---|
| 1 | $PCAS02 | 字符串 | 消息 ID, 语句头 |
| 2 | fixInt | 数值 | 定位更新时间间隔,单位为 ms。 1000= 更新率为1Hz, 每秒输出1个定位点 500=更新率为2Hz,每秒输出2个定位点 250=更新率为4Hz,每秒输出4个定位点 200=更新率为5Hz,每秒输出5个定位点 100=更新率为10Hz,每秒输出10个定位点 |
| 3 | CS | 16 进制数值 | 校验和,$和*之间(不包括$和*) 所有字符的异或结果 |
| 4 | 字符 | 回车与换行符 |
CAS03
| 信息 | CAS03 |
|---|---|
| 描述 | 设置要求输出或停止输出的 NMEA 语句。 |
| 类型 | 输入 |
| 格式 | $PCAS03,nGGA,nGLL,nGSA,nGSV,nRMC,nVTG,nZDA,nANT,nDHV,nLPS,res1,r es2,nUTC,nGST,res3,res4,res5,nTIM*CS |
| 示例 | $PCAS03,1,1,1,1,1,1,1,1,0,0,,,1,1,,,,1*33 |
| 字段 | 名称 | 格式 | 参数说明 |
|---|---|---|---|
| 1 | $PCAS03 | 字符串 | 消息 ID,语句头 |
| 2 | nGGA | 数值 | GGA 输出频率, 语句输出频率是以定位更新率为基准的,n(0~9)表示每 n 次定位输出一次, 0 表示不输出该语句,空则保持原有配置。 |
| 3 | nGLL | 数值 | GLL 输出频率,同 nGGA |
| 4 | nGSA | 数值 | GSA 输出频率,同 nGGA |
| 5 | nGSV | 数值 | GSV 输出频率,同 nGGA |
| 6 | nRMC | 数值 | RMC 输出频率,同 nGGA |
| 7 | nVTG | 数值 | VTG 输出频率,同 nGGA |
| 8 | nZDA | 数值 | ZDA 输出频率,同 nGGA |
| 9 | nANT | 数值 | ANT 输出频率,同 nGGA |
| 10 | nDHV | 数值 | DHV 输出频率,同 nGGA |
| 11 | nLPS | 数值 | LPS 输出频率, 同 nGGA |
| 12 | res1 | 数值 | 保留 |
| 13 | res2 | 数值 | 保留 |
| 14 | nUTC | 数值 | UTC 输出频率, 同 nGGA |
| 15 | nGST | 数值 | GST 输出频率, 同 nGST |
| 16 | res3 | 数值 | 保留 |
| 17 | res4 | 数值 | 保留 |
| 18 | res5 | 数值 | 保留 |
| 19 | nTIM | 数值 | TIM(PCAS60) 输出频率, 同 nGGA |
| 20 | CS | 16 进制数值 | 校验和,$和*之间(不包括$和*) 所有字符的异或结果 |
| 21 | 字符 | 回车与换行符 |
CAS04
| 信息 | CAS04 |
|---|---|
| 描述 | 配置工作系统。 |
| 类型 | 输入 |
| 格式 | $PCAS04,mode*hh |
| 示例 | $PCAS04,3*1A 北斗和 GPS 双模 $PCAS04,1*18 单 GPS 工作模式 $PCAS04,2*1B 单北斗工作模式 |
| 字段 | 名称 | 格式 | 参数说明 |
|---|---|---|---|
| 1 | $PCAS04 | 字符串 | 消息 ID, 语句头 |
| 2 | mode | 数字 | 工作系统配置。对于特点的产品型号支持下面的部分配置。 1=GPS 2=BDS 3=GPS+BDS 4=GLONASS 5=GPS+GLONASS 6=BDS+GLONASS 7=GPS+BDS+GLONASS |
| 3 | CS | 16进制数值 | 校验和, $和*之间(不包括$和*) 所有字符的异或结果 |
| 4 | 字符 | 回车与换行符 |
CAS05
| 信息 | CAS05 |
|---|---|
| 描述 | 设置 NMEA 协议类型选择。 多模导航接收机的协议类型比较繁多, 数据协议标准也比较多, 本接收机产品可以支持多种协议(可选配置) 。 |
| 类型 | 输入 |
| 格式 | $PCAS05,ver*CS |
| 示例 | $PCAS05,1*19 |
| 字段 | 名称 | 格式 | 参数说明 |
|---|---|---|---|
| 1 | $PCAS05 | 字符串 | 消息 ID, 语句头 |
| 2 | mode | 数字 | NMEA 协议类型选择(备注[1]) |
| 3 | CS | 16 进制数值 | 校验和, $和*之间(不包括$和*) 所有字符的异或结果 |
| 4 | 字符 | 回车与换行符 |
备注[1] NMEA 协议类型选择
| 2 | 兼容 NMEA 4.1 以上版本 |
|---|---|
| 5 | 兼容中国交通运输信息中心的 BDS/GPS 双模协议,兼容 NMEA 2.3 以上版本, 兼容NMEA4.0 协议 |
| 9 | 兼容单 GPS NMEA0183 协议, 兼容 NMEA 2.2 版本 |
CAS06
| 信息 | CAS06 |
|---|---|
| 描述 | 查询产品信息 |
| 类型 | 输入 |
| 格式 | $PCAS06,info*CS |
| 示例 | $PCAS06,0*1B |
| 字段 | 名称 | 格式 | 参数说明 |
|---|---|---|---|
| 1 | $PCAS06 | 字符串 | 消息 ID, 语句头 |
| 2 | info | 数字 | 查询产品的信息类型 0=查询固件版本号 1=查询硬件型号及序列号 2=查询多模接收机的工作模式 3=查询产品的客户编号 5=查询升级代码信息 |
| 3 | CS | 16 进制数值 | 校验和,$和*之间(不包括$和*) 所有字符的异或结果 |
| 4 | 字符 | 回车与换行符 |
CAS10
| 信息 | CAS10 |
|---|---|
| 描述 | 接收机重启 |
| 类型 | 输入 |
| 格式 | $PCAS10,rs*CS |
| 示例 | $PCAS10,0*1C 热启动 $PCAS10,1*1D 温启动 $PCAS10,2*1E 冷启动 $PCAS10,3*1F 出厂启动 |
| 字段 | 名称 | 格式 | 参数说明 |
|---|---|---|---|
| 1 | $PCAS10 | 字符串 | 消息 ID,语句头 |
| 2 | rs | 数字 | 启动模式配置。 0=热启动。 不使用初始化信息备份存储中的所有数据有效。 1=温启动。 不使用初始化信息, 清除星历。2=冷启动。 不使用初始化信息,清除备份存储中除配置外的所有数据。 3=出厂启动。 清除内存所有数据,并将接收机复位 至出厂默认配置。 |
| 3 | CS | 16进制数值 | 校验和,$和*之间(不包括$和*)所有字符的异或结果 |
| 4 | 字符 | 回车与换行符 |
CAS12
| 信息 | CAS12 |
|---|---|
| 描述 | Air530Z 可以通过拉低ON_OFF管脚来进入低功耗模式,暂不支持低功耗指令 |
| 类型 | |
| 格式 | |
| 示例 |
CAS15
| 信息 | CAS15 |
|---|---|
| 描述 | 卫星系统控制指令, 可以配置是否接收系统中任何一颗卫星 |
| 类型 | 输入 |
| 格式 | $PCAS15,X,YYYYYYYY*CS |
| 示例 | $PCAS15,2,FFFFFFFF*37, 开启北斗的 1-32 号卫星 $PCAS15,2,FFFFFFE0*42, 开启北斗的 6-32 号卫星, 北斗 1-5 号卫星关闭 $PCAS15,4,FFFF*31, 开启 SBAS 的 1-16 号卫星, 即 PRN=120-135 $PCAS15,5,1F*47, 开启 QZSS 的 1-5 号卫星, 即 PRN=193, 194, 195, 199, 197 |
| 字段 | 名称 | 格式 | 参数说明 |
|---|---|---|---|
| 1 | $PCAS15 | 字符串 | 消息 ID,语句头 |
| 2 | SYS_ID | 1 个数字 | 2=北斗 1-32 号卫星 3=北斗 33-64 号卫星 4=SBAS 卫星(1-19 号 SBAS 卫星, 对应 PRN 120-138号) 5=QZSS 卫星(1-5 号 QZSS 卫星, 对应 PRN 193,194, 195, 199, 197 号) |
| 3 | SV_MASK | 1 到 8 个 16 进制数值 | 每个16进制字符控制4颗卫星, 最右边的控制1-4号卫星。16 进制字符转换为 4bit 二进制, 每 1bit 对应 1 颗卫星, 1=接收该卫星; 0=禁止。 举例: 3FFFFFE0, 表示禁止 31,32,1-5 号卫星。 |
| 4 | CS | 16 进制数值 | 校验和, $和*之间(不包括$和*) 所有字符的异或结果 |
| 5 | 字符 | 回车与换行符 |
10.2 支持NMEA0183协议
Air530Z支持NMEA0183 V4.1协议并兼容以前版本,关于NMEA0183 V4.1的详细信息可以参照NMEA 0183 V4.1官方文档。
常见输出格式如下:
GGA:时间、位置、卫星数量
GSA:GPS接收机操作模式,定位使用的卫星,DOP值,定位状态
GSV:可见GPS卫星信息、仰角、方位角、信噪比
RMC:时间、日期、位置、速度
VTG:地面速度信息
语句标识符:
| 标识符 | 含 义 |
|---|---|
| BD | BDS,北斗二代卫星系统 |
| GP | GPS |
| GL | GLONASS |
| GA | Galileo |
| GN | GNSS,全球导航卫星系统 |
GGA
| 信息 | GGA |
|---|---|
| 描述 | 接收机时间、 位置及定位相关的数据 |
| 类型 | 输出 |
| 格式 | $-GGA,UTCtime,lat,uLat,lon,uLon,FS,numSv,HDOP,msl,uMsl,sep,uSep,diffAg e,diffSta*CS |
| 示例 | $GPGGA,235316.000,2959.9925,S,12000.0090,E,1,06,1.21,62.77,M,0.00,M,,*7B |
| 字段 | 名称 | 格式 | 参数说明 |
|---|---|---|---|
| 1 | $--GGA | 字符串 | 消息 ID,GGA 语句头,’--‘为系统标识 |
| 2 | UTCtime | hhmmss.sss | 当前定位的 UTC 时间 |
| 3 | lat | ddmm.mmmm | 纬度, 前 2 字符表示度, 后面的字符表示分 |
| 4 | uLat | 字符 | 纬度方向: N-北, S-南 |
| 5 | lon | dddmm.mmm m | 经度, 前 3 字符表示度,后面的字符表示分 |
| 6 | uLon | 字符 | 经度方向:E-东,W-西 |
| 7 | FS | 数值 | 指示当前定位质量,该字段不应为空 |
| 8 | numSv | 数值 | 用于定位的卫星数目,00~24 |
| 9 | HDOP | 数值 | 水平精度因子(HDOP) |
| 10 | msl | 数值 | 海拔高度,即接收机天线相对于大地水准面的高度 |
| 11 | uMsl | 字符 | 高度单位,米,固定字符 M |
| 12 | sep | 数值 | 参考椭球面与大地水准面之间的距离,“-” 表示大地水准面低于参考椭球面 |
| 13 | uSep | 字符 | 高度单位,米,固定字符 M |
| 14 | diffAge | 数值 | 差分修正的数据龄期, 未使用 DGPS 时该域为空 |
| 15 | diffSta | 数值 | 差分参考站的ID |
| 16 | CS | 16 进制数值 | 校验和,$和*之间(不包括$和*) 所有字符的异或结果 |
| 17 | 字符 | 回车与换行符 |
GSA
| 信息 | GSA |
|---|---|
| 描述 | 用于定位的卫星编号与 DOP 信息。 不管是否定位或者是否有可用卫星, 都输出 GSA 语句; 当接收机处于多系统联合工作时, 每个系统的可用卫星对应一条 GSA 语句, 每条 GSA 语句都包含根据组合卫星系统得到的 PDOP、 HDOP 和 VDOP。 |
| 类型 | 输出 |
| 格式 | $--GSA,smode,FS{,SVID},PDOP,HDOP,VDOP*CS |
| 示例 | $GPGSA,A,3,05,21,31,12,18,29,,,,,,,2.56,1.21,2.25*01 |
| 字段 | 名称 | 格式 | 参数说明 |
|---|---|---|---|
| 1 | $--GSA | 字符串 | 消息 ID, GSA 语句头, ’--‘为系统标识 |
| 2 | smode | 字符 | 模式切换方式指示 |
| 3 | FS | 数字 | 定位状态标志 |
| 4 | {,SVID} | 数值 | 用于定位的卫星编号, 该字段共显示 12 颗可用卫星编号,多于12 颗时只输出前12颗,不足 12 颗时不足的区域补空 |
| 5 | PDOP | 数值 | 位置精度因子(PDOP) |
| 6 | HDOP | 数值 | 水平精度因子(HDOP) |
| 7 | VDOP | 数值 | 垂直精度因子(VDOP) |
| 8 | systemId | 数值 | NMEA 所定义的 GNSS系统 ID号 仅 NMEA 4.1 及以上版本有效 |
| 9 | CS | 16 进制数值 | 校验和, $和*之间(不包括$和*) 所有字符的异或结果 |
| 10 | 字符 | 回车与换行符 |
| 模式切换方式指示 | 描述 |
|---|---|
| M | 手动切换。 强制为 2D 或者 3D 工作模式 |
| A | 自动切换。 接收机自动切换 2D/3D 工作模式 |
| 定位状态 | 描述 |
| 1 | 定位无效 |
| 2 | 2D 定位 |
| 3 | 3D 定位 |
| 系统 ID | 描述 |
| 1 | GPS 系统 |
| 2 | GLONASS 系统 |
| 4 | BDS 系统 |
GSV
| 信息 | GSV |
|---|---|
| 描述 | 可见卫星的卫星编号及其仰角、 方位角、 载噪比等信息。 每条 GSV 语句中的{卫星编号,仰角,方位角,载噪比}参数组的数量可变,最多为 4 组, 最少为 0 组。 |
| 类型 | 输出 |
| 格式 | $--GSV,numMsg,msgNo,numSv{,SVID,ele,az,cn0} *CS |
| 示例 | $GPGSV,3,1,10,25,68,053,47,21,59,306,49,29,56,161,49,31,36,265,49*79 $GPGSV,3,2,10,12,29,048,49,05,22,123,49,18,13,000,49,01,00,000,49*72 $GPGSV,3,3,10,14,00,000,03,16,00,000,27*7C |
| 字段 | 名称 | 格式 | 参数说明 |
|---|---|---|---|
| 1 | $--GSV | 字符串 | 消息 ID, GSV 语句头, ’--‘为系统标识 |
| 2 | numMsg | 字符 | 语句总数。每条 GSV 语句最多输出 4 颗可见卫星信息,因此,当该系统可见卫星多于 4 颗时,将需要多条 GSV 语句。 |
| 3 | msgNo | 数字 | 当前语句编号 |
| 4 | numSv | 数值 | 可见卫星总数 |
| 5 | {,SVID,ele, az,cn0} | 数值 | 依次为:卫星编号; 仰角, 取值范围为 0~90, 单位是度; 方位角, 取值范围为 0~359,单位是度; 载噪比, 取值范围为 0~99, 单位是 dB-Hz, 如果没有跟踪到当前卫星,补空 |
| 6 | signalId | 数值 | NMEA 所定义的 GNSS 信号 ID(0 代表全部信号)仅 NMEA 4.1 及以上版本有效 |
| 7 | CS | 16 进制数值 | 校验和, $和*之间(不包括$和*) 所有字符的异或结果 |
| 8 | 字符 | 回车与换行符 |
RMC
| 信息 | RMC |
|---|---|
| 描述 | 推荐的最小定位信息 |
| 类型 | 输出 |
| 格式 | $--RMC,UTCtime,status,lat,uLat,lon,uLon,spd,cog,date,mv,mvE,mode*CS |
| 示例 | $GPRMC,235316.000,A,2959.9925,S,12000.0090,E,0.009,75.020,020711,,,A*45 |
| 字段 | 名称 | 格式 | 参数说明 |
|---|---|---|---|
| 1 | $--RMC | 字符串 | 消息 ID, RMC 语句头, ’--‘为系统标识 |
| 2 | UTCtime | hhmmss.sss | 当前定位的 UTC 时间 |
| 3 | status | 字符串 | 位置有效标志。 V=接收机警告, 数据无效 A=数据有效 |
| 4 | lat | ddmm.mmmm | 纬度,前2字符表示度,后面的字符表示分 |
| 5 | uLat | 字符 | 纬度方向: N-北, S-南 |
| 6 | lon | dddmm.mmm m | 经度,前3字符表示度,后面的字符表示分 |
| 7 | uLon | 字符 | 经度方向:E-东,W-西 |
| 8 | spd | 数值 | 对地速度,单位为节 |
| 9 | cog | 数值 | 对地真航向,单位为度 |
| 10 | date | ddmmyy | 日期(dd 为日,mm为月,yy 为年) |
| 11 | mv | 数值 | 磁偏角,单位为度。固定为空 |
| 12 | mvE | 字符 | 磁偏角方向:E-东,W-西。固定为空 |
| 13 | mode | 字符 | 定位模式标志 仅 NMEA 2.3 及以上版本有效 |
| 14 | navStatus | 字符 | 导航状态标示符(V 表示系统不输出导航状态信息) 仅 NMEA 4.1 及以上版本有效 |
| 15 | CS | 16进制数值 | 校验和, $和*之间(不包括$和*) 所有字符的异或结果 |
| 16 | 字符 | 回车与换行符 |
| 定位模式标志 | 描述 |
|---|---|
| A | 自主模式 |
| E | 估算模式(航位推算) |
| N | 数据无效 |
| D | 差分模式 |
| M | 未定位, 但存在外部输入或历史保存的位置 |
VTG
| 信息 | VTG |
|---|---|
| 描述 | 对地速度与对地航向信息。 |
| 类型 | 输出 |
| 格式 | $--VTG,cogt,T,cogm,M,sog,N,kph,K,mode*CS |
| 示例 | $GPVTG,75.20,T,,M,0.009,N,0.017,K,A*02 |
| 字段 | 名称 | 格式 | 参数说明 |
|---|---|---|---|
| 1 | $--VTG | 字符串 | 消息 ID, VTG 语句头, ’--‘为系统标识 |
| 2 | cogt | 数值 | 对地真北航向, 单位为度 |
| 3 | T | 字符 | 真北指示, 固定为 T |
| 4 | cogm | 数值 | 对地磁北航向, 单位为度 |
| 5 | M | 字符 | 磁北指示, 固定为 M |
| 6 | sog | 数值 | 对地速度, 单位为节 |
| 7 | N | 字符 | 速度单位节, 固定为 N |
| 8 | kph | 数值 | 对地速度, 单位为千米每小时 |
| 9 | K | 字符 | 速度单位, 千米每小时, 固定为 K |
| 10 | mode | 字符 | 定位模式标志 仅 NMEA 2.3 及以上版本有效 |
| 11 | CS | 16 进制数值 | 校验和, $和*之间(不包括$和*) 所有字符的异或结果 |
| 12 | 字符 | 回车与换行符 |
| 定位模式标志 | 描述 |
|---|---|
| A | 自主模式 |
| E | 估算模式(航位推算) |
| N | 数据无效 |
| D | 差分模式 |
| M | 未定位, 但存在外部输入或历史保存的位置 |
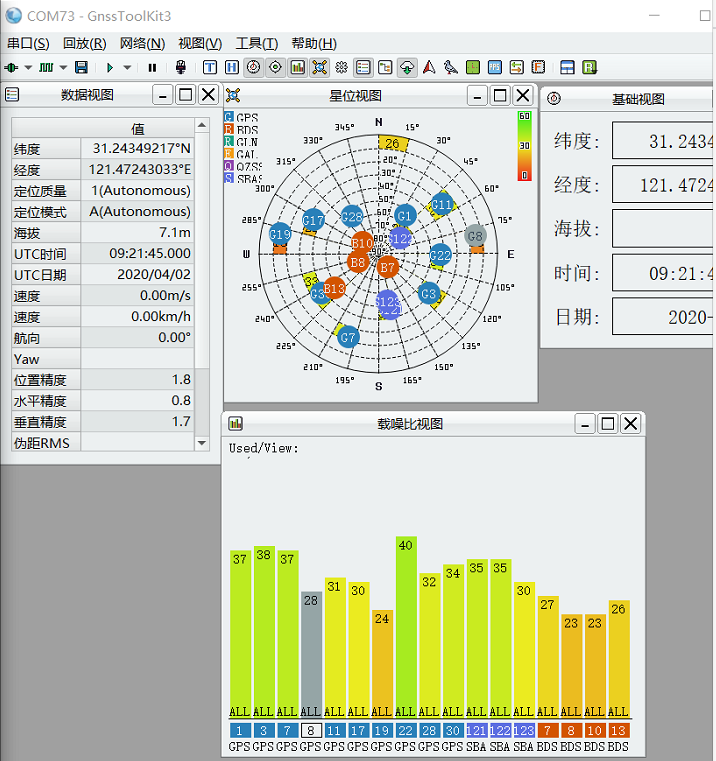
11 GNSS工具GnssToolKit3
Gnss ToolKit3是一个专为Air530Z开发的GNSS工具,它为用户评估、控制Air530Z模块提供了一个易用、强大的可视化PC端工具。当然用户也可以使用诸如u-Center、PowerGPS等工具。
| 版本号 | 修改记录 | 日期 | 作者 |
|---|---|---|---|
| V1.0 | 新建 | 2020-10-12 | Loukanghua |
| V1.1 | 更新休眠模式下的功耗数据为6.4mA | 2020-12-10 | Loukanghua |
| V1.2 | 新出的模块解决了休眠功耗大的问题 | 2021-4-14 | Loukanghua |
Air530Z GPS/北斗定位模块_设计指导手册_V1.2的更多相关文章
- 基于GPS北斗卫星授时系统和NTP网络授时服务器的设计与开发
基于GPS北斗卫星授时系统和NTP网络授时服务器的设计与开发 安徽京准科技提供@请勿转载@@ 更多资料请参考——ahjzsz.com 天文观测设备对于控制系统的时间准确度有严格要求.为此,采用搭建高精 ...
- [转]Markdown 公式指导手册(包含LaTeX)
Cmd Markdown 公式指导手册 本文为转载文章,并且由于LaTeX的可能不能全部兼容,所以可能有部分公式无法在博客园显示,可以移步原网站. 本文固定链接: https://www.zybulu ...
- Java 注解指导手册 – 终极向导
原文链接 原文作者:Dani Buiza 译者:Toien Liu 校对:深海 编者的话:注解是java的一个主要特性且每个java开发者都应该知道如何使用它. 我们已经在Java Code Gee ...
- 基于GPS\北斗、GIS、GPRS技术构建智能巡检系统
巡线工负责输油管网设施的日常巡查,可以及时发现管网设施是否完好.但巡检工作辛苦,加之管线在大部分情况下又处于良好状态,使得巡检人员麻痹大意,往往不能按规定程序进行巡检,造成巡检不到位,这样就不能从根本 ...
- UML学习总结(3)——StarUML指导手册
StarUML使用说明-指导手册 原著:Stephen Wong 翻译:火猴 StarUML是一种生成类图和其他类型的统一建模语言(UML)图表的工具.这是一个用Java语言描述 ...
- SYN6107型 GPS北斗双模子钟
SYN6107型 GPS北斗双模子钟 产品概述 SYN6107型GPS北斗双模子钟是由西安同步电子科技有限公司精心设计.自行研发生产的一套以接收北斗卫星信号的子钟,从北斗地球同步卫星上获取标准时钟信号 ...
- 敏捷软件开发_设计原则<三>
敏捷软件开发_设计原则 单一职责原则(single responsibilities principle,SRP) 原理:一个类应该只有一个变化 分离职责:如果不耦合的职责那么很简单,如果两个职责耦合 ...
- HR系列GPS北斗时间同步服务器在电力系统典型应用
HR系列GPS北斗时间同步服务器在电力系统典型应用 时间同步系统主要由主时钟.若干从时钟.时间信号传输介质组成.根据时间同步现场的不同要求,时间同步系统的结构配置有多种形式,主要分为三种:基本式.主从 ...
- 【转载】Cmd Markdown 公式指导手册
目录 Cmd Markdown 公式指导手册 一.公式使用参考 1.如何插入公式 2.如何输入上下标 3.如何输入括号和分隔符 4.如何输入分数 5.如何输入开方 6.如何输入省略号 7.如何输入矢量 ...
随机推荐
- 虚拟机之 Parallels Desktop
去官网看看 在 Mac 虚拟机中跨多个操作系统开发和测试 访问 Microsoft Office for Windows 和 Internet Explorer 快速运行 Windows 应用不会减慢 ...
- layui中时间插件laydate的使用
1.加载layui.js 2.html部分 <div class="layui-inline"> <label class="layui-form-la ...
- SSM久别遇新坑
SSM久别遇新坑 久别个锤子,也就几天没看,改bug改到怀疑人生 maven的父子模块问题 众所周知,用maven建立一个空的模块,在它之下,将原本的各层次结构分别新建为一个子模块,就能够将各业务进行 ...
- back_insert_iterator和insert_iterator
#include <iostream> #include <string> #include <iterator> #include <vector> ...
- Redis学习笔记六:持久化实验(AOF,RDB)
作者:Grey 原文地址:Redis学习笔记六:持久化实验(AOF,RDB) Redis几种持久化方案介绍和对比 AOF方式:https://blog.csdn.net/ctwctw/article/ ...
- Jmeter(四十五) - 从入门到精通高级篇 - Jmeter之网页爬虫-上篇(详解教程)
1.简介 上大学的时候,第一次听同学说网页爬虫,当时比较幼稚和懵懂,觉得就是几只电子虫子爬在网页上在抓取东西.后来又听说写代码可以实现网页爬虫,宏哥感觉高大上,后来工作又听说,有的公司做爬虫被抓的新闻 ...
- 在linux下把jsp文件 打包war格式(centos7)
在linux下把jsp文件 打成war包 chmod -R 777 /data/jdk8u242-b08/bincd /data/TongWeb61712/deployment/TestCase//d ...
- 查看报错原因 sshd -t
b for ssh.service failed because the control process exited with error code. See "systemctl sta ...
- [转载]性能测试工具 2 步解决 too many open files 的问题,让服务器支持更多连接数
[转载]性能测试工具 2 步解决 too many open files 的问题,让服务器支持更多连接数 大话性能 · 2018年10月09日 · 最后由 大话性能 回复于 2018年10月09日 · ...
- ltp日志
grep "fail" -i /var/log/messages |wc -lgrep "fail" -i /var/log/messagesgrep &quo ...