ceph-csi源码分析(5)-rbd driver-nodeserver分析(上)
更多 ceph-csi 其他源码分析,请查看下面这篇博文:kubernetes ceph-csi分析目录导航
ceph-csi源码分析(5)-rbd driver-nodeserver分析(上)
当ceph-csi组件启动时指定的driver type为rbd时,会启动rbd driver相关的服务。然后再根据controllerserver、nodeserver的参数配置,决定启动ControllerServer与IdentityServer,或NodeServer与IdentityServer。
基于tag v3.0.0
https://github.com/ceph/ceph-csi/releases/tag/v3.0.0
rbd driver分析将分为4个部分,分别是服务入口分析、controllerserver分析、nodeserver分析与IdentityServer分析。
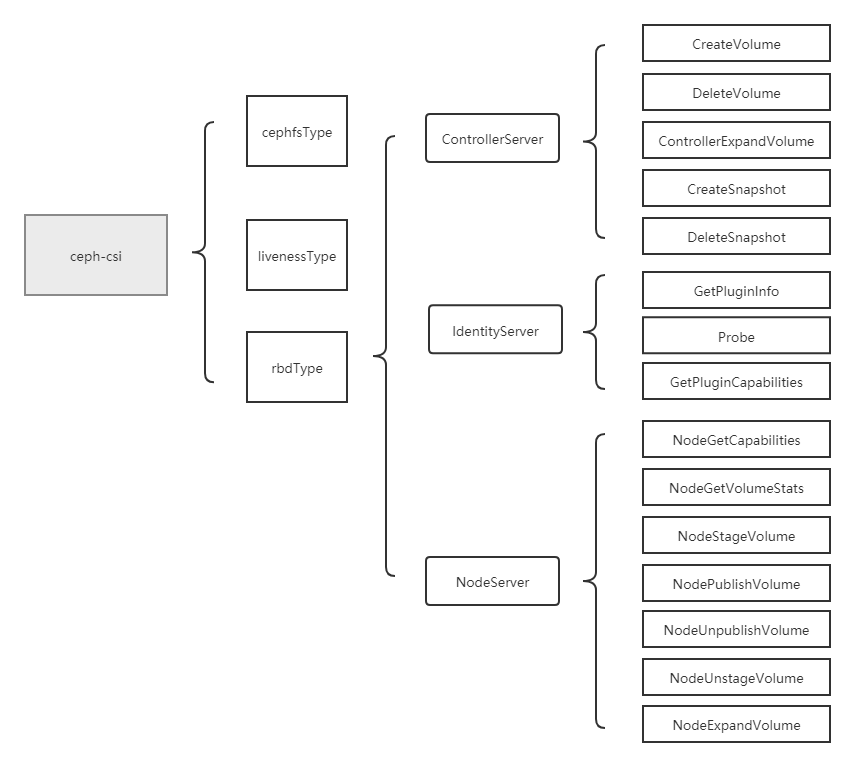
这节进行nodeserver分析,nodeserver主要包括了NodeGetCapabilities(获取driver能力)、NodeGetVolumeStats(存储探测及metrics获取)、NodeStageVolume(map rbd与mount stagingPath)、NodePublishVolume(mount targetPath)、NodeUnpublishVolume(umount targetPath)、NodeUnstageVolume(umount stagingPath与unmap rbd)、NodeExpandVolume(node端存储扩容)操作,将一一进行分析。这节进行NodeGetCapabilities(获取driver能力)、NodeGetVolumeStats(存储探测及metrics获取)、NodeExpandVolume(node端存储扩容)的分析。
nodeserver分析
(1)NodeGetCapabilities
简介
NodeGetCapabilities主要用于获取该ceph-csi driver的能力。
该方法由由kubelet调用,在kubelet调用NodeExpandVolume、NodeStageVolume、NodeUnstageVolume等方法前,会先调用NodeGetCapabilities来获取该ceph-csi driver的能力,看是否支持对这些方法的调用。
kubelet中调用的有关代码位于pkg/volume/csi/csi_client.go。
NodeGetCapabilities
NodeGetCapabilities方法中注册了csi driver的能力。
如下代码表示该csi组件支持的能力有:
(1)挂载存储到节点,把存储从节点上解除挂载;
(2)获取节点上的存储状态;
(3)存储扩容。
// ceph-csi/internal/rbd/nodeserver.go
// NodeGetCapabilities returns the supported capabilities of the node server.
func (ns *NodeServer) NodeGetCapabilities(ctx context.Context, req *csi.NodeGetCapabilitiesRequest) (*csi.NodeGetCapabilitiesResponse, error) {
return &csi.NodeGetCapabilitiesResponse{
Capabilities: []*csi.NodeServiceCapability{
{
Type: &csi.NodeServiceCapability_Rpc{
Rpc: &csi.NodeServiceCapability_RPC{
Type: csi.NodeServiceCapability_RPC_STAGE_UNSTAGE_VOLUME,
},
},
},
{
Type: &csi.NodeServiceCapability_Rpc{
Rpc: &csi.NodeServiceCapability_RPC{
Type: csi.NodeServiceCapability_RPC_GET_VOLUME_STATS,
},
},
},
{
Type: &csi.NodeServiceCapability_Rpc{
Rpc: &csi.NodeServiceCapability_RPC{
Type: csi.NodeServiceCapability_RPC_EXPAND_VOLUME,
},
},
},
},
}, nil
}
(2)NodeGetVolumeStats
简介
NodeGetVolumeStats用于探测挂载存储的状态,并返回该存储的相关metrics给kubelet。
由kubelet定时循环调用,获取volume相关指标。kubelet定时调用的代码位于pkg/kubelet/server/stats/volume_stat_calculator.go-StartOnce()。
NodeGetVolumeStats
主要逻辑:
(1)获取存储挂载路径;
(2)检测存储挂载路径是否为挂载点(对比指定路径与其父目录的stat结果中的device的值,如果device值不一致,则是挂载点);
(3)通过stat获取存储挂载路径的Metrics并返回。
// internal/csi-common/nodeserver-default.go
// NodeGetVolumeStats returns volume stats.
func (ns *DefaultNodeServer) NodeGetVolumeStats(ctx context.Context, req *csi.NodeGetVolumeStatsRequest) (*csi.NodeGetVolumeStatsResponse, error) {
// 获取存储挂载路径
var err error
targetPath := req.GetVolumePath()
if targetPath == "" {
err = fmt.Errorf("targetpath %v is empty", targetPath)
return nil, status.Error(codes.InvalidArgument, err.Error())
}
/*
volID := req.GetVolumeId()
TODO: Map the volumeID to the targetpath.
CephFS:
we need secret to connect to the ceph cluster to get the volumeID from volume
Name, however `secret` field/option is not available in NodeGetVolumeStats spec,
Below issue covers this request and once its available, we can do the validation
as per the spec.
https://github.com/container-storage-interface/spec/issues/371
RBD:
Below issue covers this request for RBD and once its available, we can do the validation
as per the spec.
https://github.com/ceph/ceph-csi/issues/511
*/
// 检测存储挂载路径是否为mountpoint
isMnt, err := util.IsMountPoint(targetPath)
if err != nil {
if os.IsNotExist(err) {
return nil, status.Errorf(codes.InvalidArgument, "targetpath %s doesnot exist", targetPath)
}
return nil, err
}
if !isMnt {
return nil, status.Errorf(codes.InvalidArgument, "targetpath %s is not mounted", targetPath)
}
// 通过stat获取存储挂载路径的Metrics
cephMetricsProvider := volume.NewMetricsStatFS(targetPath)
volMetrics, volMetErr := cephMetricsProvider.GetMetrics()
if volMetErr != nil {
return nil, status.Error(codes.Internal, volMetErr.Error())
}
available, ok := (*(volMetrics.Available)).AsInt64()
if !ok {
klog.Errorf(util.Log(ctx, "failed to fetch available bytes"))
}
capacity, ok := (*(volMetrics.Capacity)).AsInt64()
if !ok {
klog.Errorf(util.Log(ctx, "failed to fetch capacity bytes"))
return nil, status.Error(codes.Unknown, "failed to fetch capacity bytes")
}
used, ok := (*(volMetrics.Used)).AsInt64()
if !ok {
klog.Errorf(util.Log(ctx, "failed to fetch used bytes"))
}
inodes, ok := (*(volMetrics.Inodes)).AsInt64()
if !ok {
klog.Errorf(util.Log(ctx, "failed to fetch available inodes"))
return nil, status.Error(codes.Unknown, "failed to fetch available inodes")
}
inodesFree, ok := (*(volMetrics.InodesFree)).AsInt64()
if !ok {
klog.Errorf(util.Log(ctx, "failed to fetch free inodes"))
}
inodesUsed, ok := (*(volMetrics.InodesUsed)).AsInt64()
if !ok {
klog.Errorf(util.Log(ctx, "failed to fetch used inodes"))
}
return &csi.NodeGetVolumeStatsResponse{
Usage: []*csi.VolumeUsage{
{
Available: available,
Total: capacity,
Used: used,
Unit: csi.VolumeUsage_BYTES,
},
{
Available: inodesFree,
Total: inodes,
Used: inodesUsed,
Unit: csi.VolumeUsage_INODES,
},
},
}, nil
}
IsMountPoint
通过调用IsLikelyNotMountPoint来判断该路径是否为挂载点。
// internal/util/util.go
// IsMountPoint checks if the given path is mountpoint or not.
func IsMountPoint(p string) (bool, error) {
dummyMount := mount.New("")
notMnt, err := dummyMount.IsLikelyNotMountPoint(p)
if err != nil {
return false, status.Error(codes.Internal, err.Error())
}
return !notMnt, nil
}
dummyMount.IsLikelyNotMountPoint()主要逻辑:
(1)对指定路径执行stat操作;
(2)对指定路径的父目录执行stat操作;
(3)通过对比指定路径与其父目录的stat结果中的device的值,判断出该路径是否为挂载点(如果device值不一致,则是挂载点)。
// vendor/k8s.io/utils/mount/mount_linux.go
// IsLikelyNotMountPoint determines if a directory is not a mountpoint.
// It is fast but not necessarily ALWAYS correct. If the path is in fact
// a bind mount from one part of a mount to another it will not be detected.
// It also can not distinguish between mountpoints and symbolic links.
// mkdir /tmp/a /tmp/b; mount --bind /tmp/a /tmp/b; IsLikelyNotMountPoint("/tmp/b")
// will return true. When in fact /tmp/b is a mount point. If this situation
// is of interest to you, don't use this function...
func (mounter *Mounter) IsLikelyNotMountPoint(file string) (bool, error) {
stat, err := os.Stat(file)
if err != nil {
return true, err
}
rootStat, err := os.Stat(filepath.Dir(strings.TrimSuffix(file, "/")))
if err != nil {
return true, err
}
// If the directory has a different device as parent, then it is a mountpoint.
if stat.Sys().(*syscall.Stat_t).Dev != rootStat.Sys().(*syscall.Stat_t).Dev {
return false, nil
}
return true, nil
}
(3)NodeExpandVolume
简介
负责node端的存储扩容操作。主要是在node上做相应操作,将存储的扩容信息同步到node上。
NodeExpandVolume resizes rbd volumes.
实际上,存储扩容分为两大步骤,第一步是csi的ControllerExpandVolume,主要负责将底层存储扩容;第二步是csi的NodeExpandVolume,当volumemode是filesystem时,主要负责将底层rbd image的扩容信息同步到rbd/nbd device,对xfs/ext文件系统进行扩展;当volumemode是block,则不用进行node端扩容操作。
NodeExpandVolume
主体流程:
(1)校验请求参数;
(2)判断指定路径是否为挂载点;
(3)获取devicePath;
(4)调用resizefs.NewResizeFs初始化resizer;
(5)调用resizer.Resize做进一步操作。
func (ns *NodeServer) NodeExpandVolume(ctx context.Context, req *csi.NodeExpandVolumeRequest) (*csi.NodeExpandVolumeResponse, error) {
volumeID := req.GetVolumeId()
if volumeID == "" {
return nil, status.Error(codes.InvalidArgument, "volume ID must be provided")
}
volumePath := req.GetVolumePath()
if volumePath == "" {
return nil, status.Error(codes.InvalidArgument, "volume path must be provided")
}
if acquired := ns.VolumeLocks.TryAcquire(volumeID); !acquired {
klog.Errorf(util.Log(ctx, util.VolumeOperationAlreadyExistsFmt), volumeID)
return nil, status.Errorf(codes.Aborted, util.VolumeOperationAlreadyExistsFmt, volumeID)
}
defer ns.VolumeLocks.Release(volumeID)
// volumePath is targetPath for block PVC and stagingPath for filesystem.
// check the path is mountpoint or not, if it is
// mountpoint treat this as block PVC or else it is filesystem PVC
// TODO remove this once ceph-csi supports CSI v1.2.0 spec
notMnt, err := mount.IsNotMountPoint(ns.mounter, volumePath)
if err != nil {
if os.IsNotExist(err) {
return nil, status.Error(codes.NotFound, err.Error())
}
return nil, status.Error(codes.Internal, err.Error())
}
if !notMnt {
return &csi.NodeExpandVolumeResponse{}, nil
}
devicePath, err := getDevicePath(ctx, volumePath)
if err != nil {
return nil, status.Error(codes.Internal, err.Error())
}
diskMounter := &mount.SafeFormatAndMount{Interface: ns.mounter, Exec: utilexec.New()}
// TODO check size and return success or error
volumePath += "/" + volumeID
resizer := resizefs.NewResizeFs(diskMounter)
ok, err := resizer.Resize(devicePath, volumePath)
if !ok {
return nil, fmt.Errorf("rbd: resize failed on path %s, error: %v", req.GetVolumePath(), err)
}
return &csi.NodeExpandVolumeResponse{}, nil
}
resizer.Resize
根据相应的文件系统格式,调用相应的resize方法。
func (resizefs *ResizeFs) Resize(devicePath string, deviceMountPath string) (bool, error) {
format, err := resizefs.mounter.GetDiskFormat(devicePath)
if err != nil {
formatErr := fmt.Errorf("ResizeFS.Resize - error checking format for device %s: %v", devicePath, err)
return false, formatErr
}
// If disk has no format, there is no need to resize the disk because mkfs.*
// by default will use whole disk anyways.
if format == "" {
return false, nil
}
klog.V(3).Infof("ResizeFS.Resize - Expanding mounted volume %s", devicePath)
switch format {
case "ext3", "ext4":
return resizefs.extResize(devicePath)
case "xfs":
return resizefs.xfsResize(deviceMountPath)
}
return false, fmt.Errorf("ResizeFS.Resize - resize of format %s is not supported for device %s mounted at %s", format, devicePath, deviceMountPath)
}
xfsResize
xfs文件系统使用xfs_growfs命令。
func (resizefs *ResizeFs) xfsResize(deviceMountPath string) (bool, error) {
args := []string{"-d", deviceMountPath}
output, err := resizefs.mounter.Exec.Command("xfs_growfs", args...).CombinedOutput()
if err == nil {
klog.V(2).Infof("Device %s resized successfully", deviceMountPath)
return true, nil
}
resizeError := fmt.Errorf("resize of device %s failed: %v. xfs_growfs output: %s", deviceMountPath, err, string(output))
return false, resizeError
}
extResize
ext文件系统使用resize2fs命令。
func (resizefs *ResizeFs) extResize(devicePath string) (bool, error) {
output, err := resizefs.mounter.Exec.Command("resize2fs", devicePath).CombinedOutput()
if err == nil {
klog.V(2).Infof("Device %s resized successfully", devicePath)
return true, nil
}
resizeError := fmt.Errorf("resize of device %s failed: %v. resize2fs output: %s", devicePath, err, string(output))
return false, resizeError
}
rbd driver-nodeserver分析(上)-小结
这节分析了NodeGetCapabilities、NodeGetVolumeStats、NodeExpandVolume方法,作用分别如下:
NodeGetCapabilities:获取ceph-csi driver的能力。
NodeGetVolumeStats:探测挂载存储的状态,并返回该存储的相关metrics给kubelet。
NodeExpandVolume:在node上做相应操作,将存储的扩容信息同步到node上。
ceph-csi源码分析(5)-rbd driver-nodeserver分析(上)的更多相关文章
- [源码解析] PyTorch 分布式 Autograd (5) ---- 引擎(上)
[源码解析] PyTorch 分布式 Autograd (5) ---- 引擎(上) 目录 [源码解析] PyTorch 分布式 Autograd (5) ---- 引擎(上) 0x00 摘要 0x0 ...
- Apache Spark源码走读之6 -- 存储子系统分析
欢迎转载,转载请注明出处,徽沪一郎. 楔子 Spark计算速度远胜于Hadoop的原因之一就在于中间结果是缓存在内存而不是直接写入到disk,本文尝试分析Spark中存储子系统的构成,并以数据写入和数 ...
- Java集合源码学习(四)HashMap分析
ArrayList.LinkedList和HashMap的源码是一起看的,横向对比吧,感觉对这三种数据结构的理解加深了很多. >>数组.链表和哈希表结构 数据结构中有数组和链表来实现对数据 ...
- Java集合源码学习(三)LinkedList分析
前面学习了ArrayList的源码,数组是顺序存储结构,存储区间是连续的,占用内存严重,故空间复杂度很大.但数组的二分查找时间复杂度小,为O(1),数组的特点是寻址容易,插入和删除困难.今天学习另外的 ...
- Java集合源码学习(二)ArrayList分析
>>关于ArrayList ArrayList直接继承AbstractList,实现了List. RandomAccess.Cloneable.Serializable接口,为什么叫&qu ...
- 十大基础排序算法[java源码+动静双图解析+性能分析]
一.概述 作为一个合格的程序员,算法是必备技能,特此总结十大基础排序算法.java版源码实现,强烈推荐<算法第四版>非常适合入手,所有算法网上可以找到源码下载. PS:本文讲解算法分三步: ...
- Java源码详解系列(十)--全面分析mybatis的使用、源码和代码生成器(总计5篇博客)
简介 Mybatis 是一个持久层框架,它对 JDBC 进行了高级封装,使我们的代码中不会出现任何的 JDBC 代码,另外,它还通过 xml 或注解的方式将 sql 从 DAO/Repository ...
- Mybatis源码学习第七天(PageHelper分析)
其实我本来是不打算写这个PageHelper的,但是后来想了想,还是写了吧!现在市场用Mybatis的产品分页应该差不多都是用PageHelper来实现的,毕竟Mybatis的分页rowbound.. ...
- 【源码】Redis exists命令bug分析
本文基于社区版Redis 4.0.8 1.复现条件 版本:社区版Redis 4.0.10以下版本 使用场景:开启读写分离的主从架构或者集群架构(master只负责写流量,slave负责读流量) 案例: ...
- 【 js 基础 】【 源码学习 】源码设计 (更新了backbone分析)
学习源码,除了学习对一些方法的更加聪明的代码实现,同时也要学习源码的设计,把握整体的架构.(推荐对源码有一定熟悉了之后,再看这篇文章) 目录结构:第一部分:zepto 设计分析 第二部分:unders ...
随机推荐
- CRM系统实施中如何避免“踩雷”
CRM系统实施后,效果没有达到预期是很多企业出现的情况.而最主要的原因就是在实施之前没有足够的思考和相应的计划.那么,企业应如何避免CRM系统实施时"踩雷"?这里有几条建议希望可以 ...
- VS·卸载进程卡死"正在配置您的系统,这可能需要一些时间"
阅文时长 | 0.34分钟 字数统计 | 596.8字符 主要内容 | 1.引言&背景 2.声明与参考资料 『VS·卸载进程卡死"正在配置您的系统,这可能需要一些时间"』 ...
- [c++] STL 标准算法
_if 1 #include <iostream> 2 #include <vector> 3 #include <algorithm> 4 using names ...
- $(cd "$(dirname "$0")",pwd) 解析
xx.sh 文件内容如下: #!/bin/bash BIN_FOLDER=$(cd "$(dirname "$0")";pwd) echo $BIN_FOLDE ...
- Chm文件阅读软件测试需求
转发: .Chm文件阅读软件测试需求 . xchm问题太多就不考虑了: kchm是问题少一些 windows打开是乱码就不去考虑 必须在windows打开正常的再在龙芯上打开 1windows打开是乱 ...
- 分布式存储ceph---ceph添加/删除osd(5)
一.添加osd 当前ceph集群中有如下osd,现在准备新添加osd: 1.选择一个osd节点,添加好新的硬盘: 2.显示osd节点中的硬盘,并重置新的osd硬盘: 列出节点磁盘:ceph-deplo ...
- linux进阶之gitlab仓库搭建及免密使用
一.Gitlab简介 GitLab 是一个用于仓库管理系统的开源项目,使用Git作为代码管理工具,并在此基础上搭建起来的web服务. 可通过Web界面进行访问公开的或者私人项目.它拥有与Github类 ...
- Lua的string库函数列表
基本函数 函数 描述 示例 结果 len 计算字符串长度 string.len("abcd") 4 rep 返回字符串s的n个拷贝 string.rep("abcd&qu ...
- Centos双网卡配置默认路由
Centos6.5 双网卡,我们只需要一个默认路由,如果两个都有或都没有会有一系列的问题 [root@centos]# vi /etc/sysconfig/network修改以下内容NETWORKIN ...
- .NET6系列:微软正式宣布Visual Studio 2022
系列目录 [已更新最新开发文章,点击查看详细] 首先,我们要感谢正在阅读这篇文章的你,我们所有的产品开发都始于你也止于你,无论你是在开发者社区上发帖,还是填写了调查问卷,还是向我们发送了反馈意 ...