PCL点云配准(3)
(1)关于点云的配准
1.首先给定源点云与目标点云。
2.提取特征确定对应点
3.估计匹配点对应的变换矩阵
4.应用变换矩阵到源点云到目标点云的变换
配准的流程图

通过特征点的匹配步骤
(1)计算源点云与目标点云的关键点
(2)计算关键点的特征描述子(比如:FPFH等等)
(3)匹配特征点计算出对应关系
(4)从特征点之间的对应关系估算变换矩阵
与Opencv中使用harris 角点等特征点来计算两幅图像之间的变换矩阵的原理是一样的,所以其中用到的算法的思路和工作流程也都很相似
有很多中方法来计算转换矩阵T = (R,t),如果给定了配对点(Di,Mi):
(1)通过点对点的方式
(2)点对平面的方式
(3)平面到平面之间的配对,等等
基于SVD分解的最小化点对点的最小距离的方法(最小方差误差的公式):

那么肯定会有误匹配,去除错误匹配点(局外点)的方法采用RANSAC方法
(1)找出三对对应的匹配点(Di ,Mi)
(2)根据这些点估算转换矩阵(R,t)
(3)对于匹配点满足  一定条件的设为内点
一定条件的设为内点
(4)重复上面的步骤N次,直到(R,t)有很多的内点

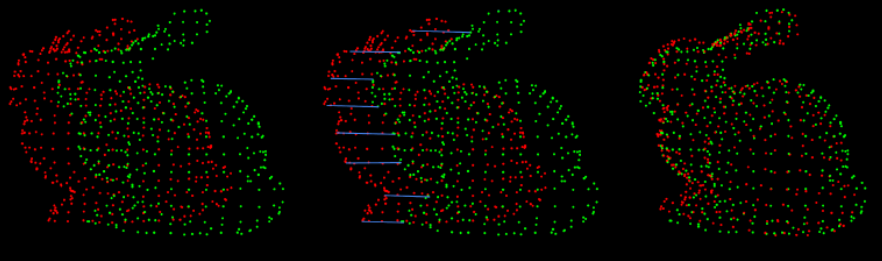
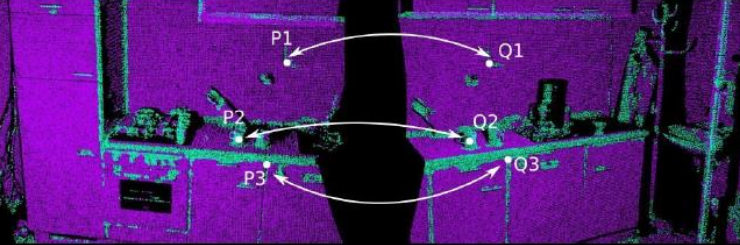
初始匹配(可以看见非常多的误匹配)

经过RANSAC算法计算后的匹配
找到了特征点之间的转换矩阵之后我们想完全的的对应源点云与目标点云还要用到ICP 算法
如图所示
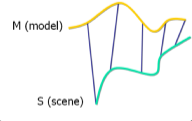
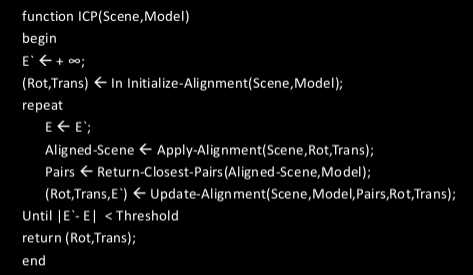
我们认为M作为模型设置点,S作为对应的场景,我们认为S上的每一个点都有与之对应的M上的点。如果有正确的配准点我们是已知的,就可以找到两者之间的旋转与平移,那么如果找到一个误差最小的配准呢?就要用到ICP算法,其算法流程
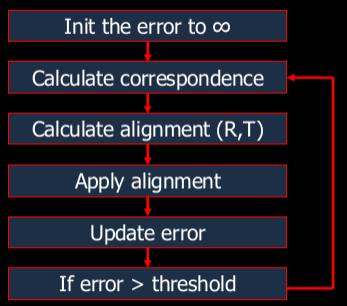
算法的伪码如下:
关注微信公众号,加入群聊

PCL点云配准(3)的更多相关文章
- PCL点云配准(1)
在逆向工程,计算机视觉,文物数字化等领域中,由于点云的不完整,旋转错位,平移错位等,使得要得到的完整的点云就需要对局部点云进行配准,为了得到被测物体的完整数据模型,需要确定一个合适的坐标系,将从各个视 ...
- PCL点云配准(2)
(1)正态分布变换进行配准(normal Distributions Transform) 介绍关于如何使用正态分布算法来确定两个大型点云之间的刚体变换,正态分布变换算法是一个配准算法,它应用于三维点 ...
- PCL点云库:ICP算法
ICP(Iterative Closest Point迭代最近点)算法是一种点集对点集配准方法.在VTK.PCL.MRPT.MeshLab等C++库或软件中都有实现,可以参见维基百科中的ICP Alg ...
- 使用正态分布变换(Normal Distributions Transform)进行点云配准
正态分布变换算法是一个配准算法,它应用于三维点的统计模型,使用标准优化技术来确定两个点云间的最优的匹配,因为其在配准过程中不利用对应点的特征计算和匹配,所以时间比其他方法快.下面是PCL官网上的一个例 ...
- PCL点云特征描述与提取(1)
3D点云特征描述与提取是点云信息处理中最基础也是最关键的一部分,点云的识别.分割,重采样,配准曲面重建等处理大部分算法,都严重依赖特征描述与提取的结果.从尺度上来分,一般分为局部特征的描述和全局特征的 ...
- PCL点云库(Point Cloud Library)简介
博客转载自:http://www.pclcn.org/study/shownews.php?lang=cn&id=29 什么是PCL PCL(Point Cloud Library)是在吸收了 ...
- MeshLab中进行点云配准
MeshLab是一个开源.可移植和可扩展的三维几何处理系统,主要用于交互处理和非结构化编辑三维三角形网格.它支持多种文件格式: import:PLY, STL, OFF, OBJ, 3DS, COLL ...
- PCL中点云数据格式之间的转化
(1) 关于pcl::PCLPointCloud2::Ptr和pcl::PointCloud<pcl::PointXYZ>两中数据结构的区别 pcl::PointXYZ::PointXYZ ...
- PCL点云库中的坐标系(CoordinateSystem)
博客转载自:https://blog.csdn.net/qq_33624918/article/details/80488590 引言 世上本没有坐标系,用的人多了,便定义了坐标系统用来定位.地理坐标 ...
随机推荐
- 潭州课堂25班:Ph201805201 django 项目 第十八课 前台 注解 (课堂笔记)
在静态文件 js/user上当下,的 auth.js 文件中 $(function () { let $username = $('#user_name'); // 选择id为user_name的网页 ...
- python2和python3比较好的共存方法
文章根据网络资料编写,只为个人学习使用.青山... ---------------------------------------------------- 由于工作学习的需求,大家都想同时安装pyt ...
- Mac下Sublime text2中文乱码问题的解决
打开sublime text2,按Ctrl+~调出console 粘贴以下代码到底部命令行并回车:import urllib2,os;pf='Package Control.sublime-packa ...
- Cow Exhibition [POJ2184] [DP] [背包的负数处理]
题意: 有很多羊,每只羊有一个幽默度和智商,要选出一些羊,智商加幽默度总和最大,其中智商总和和幽默度总和都不能是负数. 样例输入: 5 -5 7 8 -6 6 -3 2 1 -8 -5 样例输出: 8 ...
- Java 字符编码 ASCII、Unicode、UTF-8、代码点和代码单元
1 ASCII码 统一规定英语字符与二进制位之间的关系.ASCII码一共规定了128个字符的编码.例如,空格“SPACE”是32(二进制00100000),大写字母A是65(二进制01000001). ...
- pytorch做seq2seq注意力模型的翻译
以下是对pytorch 1.0版本 的seq2seq+注意力模型做法语--英语翻译的理解(这个代码在pytorch0.4上也可以正常跑): # -*- coding: utf-8 -*- " ...
- Deepin 15.4 挂载分区
硬盘是 500G,先前安装 Windows7 时,分了3个区,大小分别为 90G.100G.310G,现在用 Deepin 重装系统时,挂载情况如下: /dev/sda1 分区作为 /(挂载点),类型 ...
- .NET轻量级ORM框架Dapper入门精通
一.课程介绍 本次分享课程包含两个部分<.NET轻量级ORM框架Dapper修炼手册>和<.NET轻量级ORM框架Dapper葵花宝典>,阿笨将带领大家一起领略轻量级ORM框架 ...
- Unity Inspector面板常用的属性
在扩展Unity的时候,往往会用到一些属性,这里将常用的列一下. 1.属性只读: #if UNITY_EDITOR using UnityEditor; #endif using UnityEngin ...
- ASP.NET Core使用Razor页面
ASP.NET Core使用Razor页面 Razor是ASP.NET的页面引擎,在ASP.NET MVC 3以后被广泛使用,我在之前的博客中有所介绍,需要更多了解的朋友请移步[Razor语法] 在A ...