VIBE(前景检测)
1、VIBE思想:
为每个像素点存储了一个样本集,样本集中采样值就是该像素点过去的像素值和其邻居点的像素值,然后将每一个新的像素值和样本集进行比较来判断是否属于背景点。
2、VIBE模型初始化
通用的检测算法的初始化,需要一定长度的视频序列来完成,需要耗费数秒时间;VIBE只需要一帧图像即可。ViBe初始化就是填充像素的样本集的过程但是由于在一帧图像中不可能包含像素点的时空分布信息,我们利用了相近像素点拥有相近的时空分布特性,具体来讲就是:对于一个像素点,随机的选择它的邻居点的像素值作为它的模型样本值。这种初始化方法优点是对于噪声的反应比较灵敏,计算量小速度快,可以很快的进行运动物体的检测,缺点是容易引入Ghost区域。
3、VIBE模型更新策略
保守策略+前景点计数
保守策略:如果初始检测为前景像素,那么就一直认为是前景像素
前景点计数:对像素点进行统计,如果被标记为前景像素的次数>阈值,则认为是前景点
借鉴大牛人的代码运行、调试:
main.cpp
// This is based on
// "VIBE: A POWERFUL RANDOM TECHNIQUE TO ESTIMATE THE BACKGROUND IN VIDEO SEQUENCES"
// by Olivier Barnich and Marc Van Droogenbroeck
// Author : zouxy
// Date : 2013-4-13
// HomePage : http://blog.csdn.net/zouxy09
// Email : zouxy09@qq.com #include "ViBe.h"
#include <opencv2/video/video.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/core/core.hpp>
#include <iostream> using namespace cv;
using namespace std; int main(int argc, char* argv[])
{
Mat frame, gray, mask;
VideoCapture capture("C:\\TEST\\opencv\\car.avi");
if (!capture.isOpened())
{
cout << "No camera or video input!\n" << endl;
return -;
} ViBe_BGS Vibe_Bgs;
int count = ; while ()
{
count++;
capture >> frame;
if (frame.empty())
break;
cvtColor(frame, gray, CV_RGB2GRAY); if (count == )
{
cout << "row=" << frame.rows << " " << "cols=" << frame.cols << endl;
Vibe_Bgs.init(gray);
Vibe_Bgs.processFirstFrame(gray);
cout << " Training GMM complete!" << endl;
}
else
{
Vibe_Bgs.testAndUpdate(gray);
mask = Vibe_Bgs.getMask();
morphologyEx(mask, mask, MORPH_OPEN, Mat());
imshow("mask", mask);
} imshow("input", frame); if (cvWaitKey() == 'q')
break;
} return ;
}
ViBe.cpp
#include <opencv2/opencv.hpp>
#include <iostream>
#include "ViBe.h" using namespace std;
using namespace cv; int c_xoff[] = { -, , , -, , -, , , }; //x的邻居点
int c_yoff[] = { -, , , -, , -, , , }; //y的邻居点 ViBe_BGS::ViBe_BGS(void)
{ }
ViBe_BGS::~ViBe_BGS(void)
{ } /**************** Assign space and init ***************************/
void ViBe_BGS::init(const Mat _image)
{
for (int i = ; i < NUM_SAMPLES; i++)
{
m_samples[i] = Mat::zeros(_image.size(), CV_8UC1);//初始化每个像素点有20个样本像素点的存储值0
}
m_mask = Mat::zeros(_image.size(), CV_8UC1);
m_foregroundMatchCount = Mat::zeros(_image.size(), CV_8UC1);//
} /**************** Init model from first frame ********************/
void ViBe_BGS::processFirstFrame(const Mat _image)
{
RNG rng;
int row, col; for (int i = ; i < _image.rows; i++)
{
for (int j = ; j < _image.cols; j++)
{
for (int k = ; k < NUM_SAMPLES; k++)
{
// Random pick up NUM_SAMPLES pixel in neighbourhood to construct the model
int random = rng.uniform(, ); row = i + c_yoff[random];//修正随机值
if (row < )
row = ;
if (row >= _image.rows)
row = _image.rows - ; col = j + c_xoff[random];//修正随机值
if (col < )
col = ;
if (col >= _image.cols)
col = _image.cols - ; m_samples[k].at<uchar>(i, j) = _image.at<uchar>(row, col);//随机抽取20次该像素点周围的像素点,做为样本像素点
}
}
}
} /**************** Test a new frame and update model ********************/
void ViBe_BGS::testAndUpdate(const Mat _image)
{
RNG rng; for (int i = ; i < _image.rows; i++)
{
for (int j = ; j < _image.cols; j++)
{
int matches(), count();
float dist; while (matches < MIN_MATCHES && count < NUM_SAMPLES)//两者都满足的话就继续循环,只要有一个不满足就中断循环
{
dist = abs(m_samples[count].at<uchar>(i, j) - _image.at<uchar>(i, j));//20个样本点
if (dist < RADIUS)
matches++;
count++;
} if (matches >= MIN_MATCHES)
{
// It is a background pixel
m_foregroundMatchCount.at<uchar>(i, j) = ;//background pixel=0;It is black; // Set background pixel to 0
m_mask.at<uchar>(i, j) = ; // 如果一个像素是背景点,那么它有 1 / defaultSubsamplingFactor 的概率去更新自己的模型样本值
int random = rng.uniform(, SUBSAMPLE_FACTOR);
if (random == )
{
random = rng.uniform(, NUM_SAMPLES);
m_samples[random].at<uchar>(i, j) = _image.at<uchar>(i, j);
} // 同时也有 1 / defaultSubsamplingFactor 的概率去更新它的邻居点的模型样本值
random = rng.uniform(, SUBSAMPLE_FACTOR);
if (random == )
{
int row, col;
random = rng.uniform(, );
row = i + c_yoff[random];
if (row < )
row = ;
if (row >= _image.rows)
row = _image.rows - ; random = rng.uniform(, );
col = j + c_xoff[random];
if (col < )
col = ;
if (col >= _image.cols)
col = _image.cols - ; random = rng.uniform(, NUM_SAMPLES);
m_samples[random].at<uchar>(row, col) = _image.at<uchar>(i, j);
}
}
else
{
// It is a foreground pixel
m_foregroundMatchCount.at<uchar>(i, j)++; // Set background pixel to 255
m_mask.at<uchar>(i, j) = ; //如果某个像素点连续N次被检测为前景,则认为一块静止区域被误判为运动,将其更新为背景点
if (m_foregroundMatchCount.at<uchar>(i, j) > )
{
int random = rng.uniform(, SUBSAMPLE_FACTOR);
if (random == )
{
random = rng.uniform(, NUM_SAMPLES);
m_samples[random].at<uchar>(i, j) = _image.at<uchar>(i, j);
}
}
}
}
}
}
ViBe.h
#pragma once
#include <iostream>
#include "opencv2/opencv.hpp" using namespace cv;
using namespace std; #define NUM_SAMPLES 20 //每个像素点的样本个数
#define MIN_MATCHES 2 //#min指数
#define RADIUS 20 //Sqthere半径
#define SUBSAMPLE_FACTOR 16 //子采样概率 class ViBe_BGS
{
public:
ViBe_BGS(void);
~ViBe_BGS(void); void init(const Mat _image); //初始化
void processFirstFrame(const Mat _image);
void testAndUpdate(const Mat _image); //更新
Mat getMask(void){ return m_mask; }; private:
Mat m_samples[NUM_SAMPLES];
Mat m_foregroundMatchCount;
Mat m_mask;
};
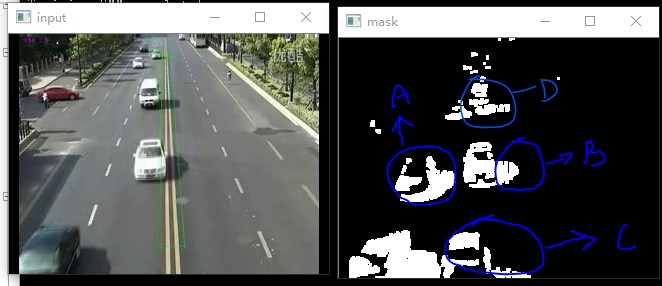
实验测试如上图,存在的问题:
1、在input窗口中并没有A,mask窗口中A是黑色车前几帧造成的,这说明A这部分消失的太慢了,就是模型数据更新的慢了点。也可以说是VIBE的最大缺点,容易进入Ghost区。
2、B 处是白色小车的影子造成的,所以VIBE算法没有做影子消除。
3、D处检测的数据有点乱
还需要做很多优化和测试工作!
VIBE(前景检测)的更多相关文章
- [转]前景检测算法--ViBe算法
原文:http://blog.csdn.net/zouxy09/article/details/9622285 转自:http://blog.csdn.net/app_12062011/article ...
- 运动检测(前景检测)之(一)ViBe
运动检测(前景检测)之(一)ViBe zouxy09@qq.com http://blog.csdn.net/zouxy09 因为监控发展的需求,目前前景检测的研究还是很多的,也出现了很多新的方法和思 ...
- ViBe(Visual Background extractor)背景建模或前景检测
ViBe算法:ViBe - a powerful technique for background detection and subtraction in video sequences 算法官网: ...
- 运动检测(前景检测)之(二)混合高斯模型GMM
运动检测(前景检测)之(二)混合高斯模型GMM zouxy09@qq.com http://blog.csdn.net/zouxy09 因为监控发展的需求,目前前景检测的研究还是很多的,也出现了很多新 ...
- [转]运动检测(前景检测)之(二)混合高斯模型GMM
转自:http://blog.csdn.net/zouxy09/article/details/9622401 因为监控发展的需求,目前前景检测的研究还是很多的,也出现了很多新的方法和思路.个人了解的 ...
- 目标检测之vibe---ViBe(Visual Background extractor)背景建模或前景检测
ViBe算法:ViBe - a powerful technique for background detection and subtraction in video sequences 算法官网: ...
- [综]前景检测GMM
tornadomeet 前景检测算法_4(opencv自带GMM) http://www.cnblogs.com/tornadomeet/archive/2012/06/02/2531705.html ...
- paper 83:前景检测算法_1(codebook和平均背景法)
前景分割中一个非常重要的研究方向就是背景减图法,因为背景减图的方法简单,原理容易被想到,且在智能视频监控领域中,摄像机很多情况下是固定的,且背景也是基本不变或者是缓慢变换的,在这种场合背景减图法的应用 ...
- 运动目标前景检测之ViBe源代码分析
一方面为了学习,一方面按照老师和项目的要求接触到了前景提取的相关知识,具体的方法有很多,帧差.背景减除(GMM.CodeBook. SOBS. SACON. VIBE. W4.多帧平均……).光流(稀 ...
随机推荐
- [解决]CXF wsdl2java 生成代码存在的一些问题
1.环境 CXF版本:3.2.4 JDK版本:1.8.0_112 2.问题 2.1.问题种类1 属性 "Value" 已定义.请使用 <jaxb:property> 解 ...
- 星级评分原理 N次重写的分析
使用的是雪碧图,用的软件是CSS Sprite Tools 第一次实现与分析: <!DOCTYPE html> <html> <head> <meta cha ...
- 20165304第4次实验《Android程序设计》实验报告
一.实验报告封面 课程:Java程序设计 班级:1653班 姓名:李松杨 学号:20165304 指导教师:娄嘉鹏 实验日期:2018年5月14日 实验时间:15:35 - 17:15 实验序号:实验 ...
- 443. String Compression
原题: 443. String Compression 解题: 看到题目就想到用map计数,然后将计数的位数计算处理,这里的解法并不满足题目的额外O(1)的要求,并且只是返回了结果array的长度,并 ...
- linux查看文件夹大小du命令
查看1级(--max-depth=1)目录的大小,并排序 参考 -h或–human-readable 以K,M,G为单位,提高信息的可读性. –max-depth= 超过指定层数的目录后,予以忽略 d ...
- tensorflow中的gfile模块(转)
简介 这些函数和python中的os模块非常的相似,一般都可以用os模块代替吧 gfile API介绍 下面将分别介绍每一个gfile API! 2-1)tf.gfile.Copy(oldpath, ...
- 十五、Facade 窗口设计模式
需求:让复杂的事务看起来简单 原理: 代码清单: DataBase: public class DataBase { private DataBase(){} public static Proper ...
- iOS之Safari调试webView/H5页面
之前做过混合开发,用的是JavaScriptCore+OC+UIWebView. Safari调试功能真的很有用,通过它可以轻松定位问题的所在,下面说说怎么调试. 开启Safari开发菜单 在Mac的 ...
- 工欲善其事,必先利其器-ecplise配置和优化
1.eclipse下的编码设置:eclipse 中使用模板新建 JSP,xhtml等 文件时,默认的编码为:ISO-8859-1. ISO-8859-1 编码对于中文的显示是不支持的,如果要支持简体中 ...
- kalman滤波(二)---扩展kalman滤波[EKF]的推导
一.状态估计的解释 我们知道每个方程都受噪声的影响,这里把位姿x和路标y看成服从某种概率分布的随机变量.因此我们关心的问题就变成了:当我们已知某些运动数据u和观测数据z时,如何确定状态量x,y的分布? ...