算法教程(2)zz
In the previous section we saw how to use vectors to solve geometry problems. Now we are going to learn how to use some basic linear algebra to do line intersection, and then apply line intersection to a couple of other problems.
Line-Line Intersection
One of the most common tasks you will find in geometry problems is line intersection. Despite the fact that it is so common, a lot of coders still have trouble with it. The first question is, what form are we given our lines in, and what form would we like them in? Ideally, each of our lines will be in the form Ax+By=C, where A, B and C are the numbers which define the line. However, we are rarely given lines in this format, but we can easily generate such an equation from two points. Say we are given two different points, (x1, y1) and (x2, y2), and want to find A, B and C for the equation above. We can do so by setting
A = y2-y1
B = x1-x2
C = A*x1+B*y1
Regardless of how the lines are specified, you should be able to generate two different points along the line, and then generate A, B and C. Now, lets say that you have lines, given by the equations:
A1x + B1y = C1
A2x + B2y = C2
To find the point at which the two lines intersect, we simply need to solve the two equations for the two unknowns, x and y.
- double det = A1*B2 - A2*B1
- if(det == 0){
- //Lines are parallel
- }else{
- double x = (B2*C1 - B1*C2)/det
- double y = (A1*C2 - A2*C1)/det
- }
To see where this comes from, consider multiplying the top equation by B2, and the bottom equation by B1. This gives you
A1B2x + B1B2y = B2C1
A2B1x + B1B2y = B1C2
Now, subtract the bottom equation from the top equation to get
A1B2x - A2B1x = B2C1 - B1C2
Finally, divide both sides by A1B2 - A2B1, and you get the equation for x. The equation for y can be derived similarly.
This gives you the location of the intersection of two lines, but what if you have line segments, not lines. In this case, you need to make sure that the point you found is on both of the line segments. If your line segment goes from (x1,y1) to (x2,y2), then to check if (x,y) is on that segment, you just need to check that min(x1,x2) ≤ x ≤ max(x1,x2), and do the same thing for y. You must be careful about double precision issues though. If your point is right on the edge of the segment, or if the segment is horizontal or vertical, a simple comparison might be problematic. In these cases, you can either do your comparisons with some tolerance, or else use a fraction class.
Finding a Circle From 3 Points
Given 3 points which are not colinear (all on the same line) those three points uniquely define a circle. But, how do you find the center and radius of that circle? This task turns out to be a simple application of line intersection. We want to find the perpendicular bisectors of XY and YZ, and then find the intersection of those two bisectors. This gives us the center of the circle.
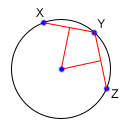
To find the perpendicular bisector of XY, find the line from X to Y, in the form Ax+By=C. A line perpendicular to this line will be given by the equation -Bx+Ay=D, for some D. To find D for the particular line we are interested in, find the midpoint between X and Y by taking the midpoint of the x and y components independently. Then, substitute those values into the equation to find D. If we do the same thing for Y and Z, we end up with two equations for two lines, and we can find their intersections as described above.
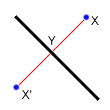
Reflection
Reflecting a point across a line requires the same techniques as finding a circle from 3 points. First, notice that the distance from X to the line of reflection is the same as the distance from X' to the line of reflection. Also note that the line between X and X' is perpendicular to the line of reflection. Now, if the line of reflection is given as Ax+By=C, then we already know how to find a line perpendicular to it: -Bx+Ay=D. To find D, we simply plug in the coordinates for X. Now, we can find the intersection of the two lines at Y, and then find X' = Y - (X - Y).
Rotation
Rotation doesn't really fit in with line intersection, but I felt that it would be good to group it with reflection. In fact, another way to find the reflected point is to rotate the original point 180 degrees about Y.
Imagine that we want to rotate one point around another, counterclockwise by θ degrees. For simplicity, lets assume that we are rotating about the origin. In this case, we can find that x' = x Cos(θ) - y Sin(θ) and y' = x Sin(θ) + y Cos(θ). If we are rotating about a point other than the origin, we can account for this by shifting our coordinate system so that the origin is at the point of rotation, doing the rotation with the above formulas, and then shifting the coordinate system back to where it started.
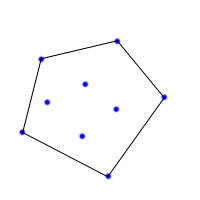
Convex Hull
A convex hull of a set of points is the smallest convex polygon that contains every one of the points. It is defined by a subset of all the points in the original set. One way to think about a convex hull is to imagine that each of the points is a peg sticking up out of a board. Take a rubber band and stretch it around all of the points. The polygon formed by the rubber band is a convex hull. There are many different algorithms that can be used to find the convex hull of a set of points. In this article, I'm just going to describe one of them, which is fast enough for most purposes, but is quite slow compared to some of the other algorithms.
First, loop through all of your points and find the leftmost point. If there is a tie, pick the highest point. You know for certain that this point will be on the convex hull, so we'll start with it. From here, we are going to move clockwise around the edge of the hull, picking the points on the hull, one at a time. Eventually, we will get back to the start point. In order to find the next point around the hull, we will make use of cross products. First, we will pick an unused point, and set the next point, N, to that point. Next, we will iterate through each unused points, X, and if (X-P) x (N-P) (where P is the previous point) is negative, we will set N to X. After we have iterated through each point, we will end up with the next point on the convex hull. See the diagram below for an illustration of how the algorithm works. We start with P as the leftmost point. Now, say that we have N and X as shown in the leftmost frame. In this case the cross product will be negative, so we will set N = X, and there will be no other unused points that make the cross product negative, and hence we will advance, setting P = N. Now, in the next frame, we will end up setting N = X again, since the cross product here will be negative. However, we aren't done yet because there is still another point that will make the cross product negative, as shown in the final frame.
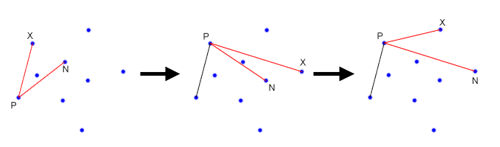
The basic idea here is that we are using the cross product to find the point which is furthest counterclockwise from our current position at P. While this may seem fairly straightforward, it becomes a little bit tricky when dealing with colinear points. If you have no colinear points on the hull, then the code is very straightforward.
- convexHull(point[] X){
- int N = lengthof(X);
- int p = 0;
- //First find the leftmost point
- for(int i = 1; i<N; i++){
- if(X[i] < X[p])
- p = i;
- }
- int start = p;
- do{
- int n = -1;
- for(int i = 0; i<N; i++){
- //Don't go back to the same point you came from
- if(i == p)continue;
- //If there is no N yet, set it to i
- if(n == -1)n = i;
- int cross = (X[i] - X[p]) x (X[n] - X[p]);
- if(cross < 0){
- //As described above, set N=X
- n = i;
- }
- }
- p = n;
- }while(start!=p);
- }
Once we start to deal with colinear points, things get trickier. Right away we have to change our method signature to take a boolean specifying whether to include all of the colinear points, or only the necessary ones.
- //If onEdge is true, use as many points as possible for
- //the convex hull, otherwise as few as possible.
- convexHull(point[] X, boolean onEdge){
- int N = lengthof(X);
- int p = 0;
- boolean[] used = new boolean[N];
- //First find the leftmost point
- for(int i = 1; i<N; i++){
- if(X[i] < X[p])
- p = i;
- }
- int start = p;
- do{
- int n = -1;
- int dist = onEdge?INF:0;
- for(int i = 0; i<N; i++){
- //X[i] is the X in the discussion
- //Don't go back to the same point you came from
- if(i==p)continue;
- //Don't go to a visited point
- if(used[i])continue;
- //If there is no N yet, set it to X
- if(n == -1)n = i;
- int cross = (X[i] - X[p]) x (X[n] - X[p]);
- //d is the distance from P to X
- int d = (X[i] - X[p]) ⋅ (X[i] - X[p]);
- if(cross < 0){
- //As described above, set N=X
- n = i;
- dist = d;
- }else if(cross == 0){
- //In this case, both N and X are in the
- //same direction. If onEdge is true, pick the
- //closest one, otherwise pick the farthest one.
- if(onEdge && d < dist){
- dist = d;
- n = i;
- }else if(!onEdge && d > dist){
- dist = d;
- n = i;
- }
- }
- }
- p = n;
- used[p] = true;
- }while(start!=p);
- }
算法教程(2)zz的更多相关文章
- 算法教程(3)zz
First off, we can use our Line-Point Distance code to test for the "BOUNDARY" case. If the ...
- 算法教程(1)zz
Introduction Many TopCoders seem to be mortally afraid of geometry problems. I think it's safe to sa ...
- 《Python算法教程》译者序
在计算机的世界中,算法本质上是我们对某一个问题或者某一类问题的解决方案.也就是说,如果我们想用计算机来解决问题的话,就必须将问题的解决思路准确而完整地描述出来,同时计算机也要能理解这个描述.这需要我们 ...
- 51nod贪心算法教程
51nod确实是一个好oj,题目质量不错,wa了还放数据,学习算法来说挺好的,这次我做了几个水的贪心,虽然水,但是确实都很典型. 教程链接:http://www.51nod.com/tutorial/ ...
- perforce 使用教程(zz)
http://www.perforce.com/documentation/perforce_technical_documentation http://blog.csdn.net/brucexu1 ...
- Weblogic禁用SSLv3和RC4算法教程
weblogic在启用https时一样会报同WebSphere那样的一SSL类漏洞,中间件修复这些漏洞原理上来说是一样的,只是在具体操作上有着较大的区别. 1. weblogic禁用SSLv3算法 编 ...
- WebSphere禁用SSLv3和RC4算法教程
WebSphere经常会报“SSL 3.0 POODLE攻击信息泄露”和"SSL/TLS 受诫礼(BAR-MITZVAH)攻击"两个漏洞,前者建议禁用SSL算法后者建议禁用RC4算 ...
- (转)WebSphere禁用SSLv3和RC4算法教程
原文:https://www.cnblogs.com/lsdb/p/7126399.html WebSphere经常会报“SSL 3.0 POODLE攻击信息泄露”和"SSL/TLS 受诫礼 ...
- 贪心算法和动态规划[zz]
http://www.cnblogs.com/asuran/archive/2010/01/26/1656399.html 贪心算法 1.贪心选择性质 所谓贪心选择性质是指所求问题的整体最优解可以通过 ...
随机推荐
- 07 DAY 1
壮烈的一天... 第一题 本意是水题,然后写了块状数组模拟,最后发现算法错了... 然后其实快排一遍扫一遍完事... 100分 #include <cstdio> #include < ...
- SpringMVC配置easyui-datagrid
SprimgMVC的UserController.java @RequestMapping(value = "listUserForJson") @ResponseBody pub ...
- MVC(Model(模型) View(视图) Controller(控制器))
复习 1. 商品表 增删改查 index.php add.php view.php edit.php action.php 2. MVC(Model(模型) Vie ...
- 怎样取出cobbler kopts中设置的参数?
Is there a way to find out with what parameters did the kernel boot? For example if I specify noexec ...
- 【GoLang】GoLang GOPATH 工程管理 最佳实践
参考资料: MAC下 Intellij IDEA GO语言插件安装及简单案例:http://blog.csdn.net/fenglailea/article/details/53054502 关于wi ...
- 【Python】 Django 怎么实现 联合主键?
unique_together¶ Options.unique_together¶ Sets of field names that, taken together, must be unique: ...
- ASP.NET - 视图状态概述
本文转载自dodream 视图状态是 ASP.NET 页框架用于在往返过程之间保留页和控件值的方法.在呈现页的 HTML 标记时,必须在回发过程中保留的页和值的当前状态将被序列化为Base64 编码字 ...
- Segment Tree Modify
For a Maximum Segment Tree, which each node has an extra value max to store the maximum value in thi ...
- 【转】Duplicate Elimination in Scrapy
本文转载自:http://blog.pluskid.org/?p=381 之前介绍 Scrapy 的时候提过 Spider Trap ,实际上,就算是正常的网络拓扑,也是很复杂的相互链接,虽然我当时给 ...
- iOS CoreData 的级联删除等操作
关于CoreData 的基本操作在网上有一些中文资料,但是这些资料大多没有涉及CoreData的详细操作,只是简单的演示了最基本用法.像级联删除这种最基本的数据库操作都没有提到.今天在网上看到了一些英 ...