KinectFusion 介绍
KinectFusion简介
KinectFusion是微软在2011年发表的一篇论文里提到的点云重建的方法,论文题目是:KinectFusion: Real-Time Dense Surface Mapping and Tracking。点云是用Kinect采集的,然后算法把这些点云注册对齐,融合成一个整体点云。
Kinect是一个RGBD扫描仪,它可以同时采集彩色图像和深度图像。这是第一代Kinect和第二代Kinect的外观比较。

Kienct每秒可以获取30帧的RGBD图像,光线暗的情况下帧率会下降一些。
这是一个典型的KinectV2的数据。左边是带颜色的点云,右边的点云去掉了颜色,并且计算了法线信息。KinectFusion处理的是深度数据,像右边这种没有带颜色的点云。Kinect数据的详细介绍可以参考专题 Kinect数据

KinectFusion的核心有两个技术,一个是ICP注册,一个是符号距离函数。它的思路是一边注册,一边融合。由于是深度视频,帧与帧之间的位置差别不大,点云可以看作是初始注册好的,所以可以直接应用ICP进行精细注册。融合采用了符号距离函数技术,它在空间中定义了一个曲面的距离场,0等值面则为测量的曲面。
KinectFusion算法
下面介绍一下KinectFusion的算法步骤:
1. 生成三维点云:Kinect采集的原始数据是深度图像,可以用KinectSDK把深度图像转化为三维点云。
2. 点云预处理:预处理包含很多可选的算子,比如法线计算,点云范围裁剪(有些扫描仪在一定范围内的误差是可以接受的,故可以剔除掉误差范围大的区域),去噪(低精度的扫描数据可以去噪提高注册稳定性),边界点剔除(边界点的误差通常很大),孤立项剔除(孤立项的误差通常也很大)等。
3. 点云位姿估计:KinectFusion是一边注册,一边融合,所以它会维护一个当前融合的整体点云,记为PointCloud。新扫描的点云Depth,就是与PointCloud进行ICP注册。ICP注册的详细介绍可以参考专题 点云ICP注册。
4. 点云融合:Depth与PointCloud注册好以后,它会与PointCloud再进行融合,更新PointCloud。
5. 整个扫描过程,每帧的点云重复步骤1-4,最后就得到一个整体点云PointCloud。
符号距离场函数(Signed Distance Function)
符号距离场函数,简称SDF,源自1996的一篇Siggraph论文:A volumetric method for building complex models from range images
SDF是定义在三维空间中的一个函数,它度量了空间点到曲面的距离。距离为0的点即为曲面上的点。我们把SDF离散化,定义在空间体素上。每个体素有三个变量:D,W,Flag。其中D为体素到曲面的距离值,W是权重,Flag是体素是否有效。
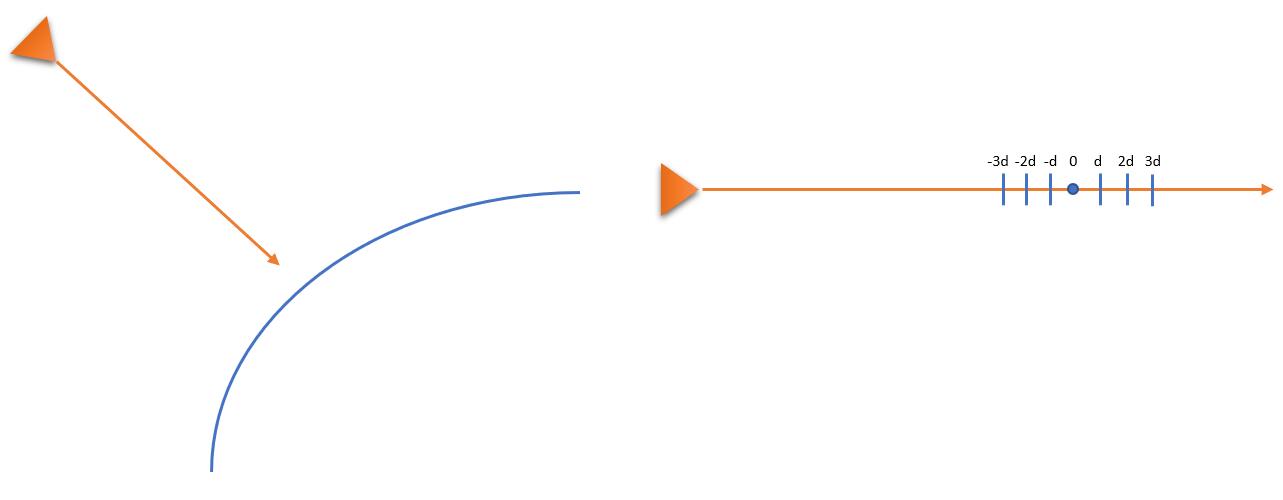
下面介绍点云如何融入SDF:点云是相机在某个视角下观察采集到的,如左图所示。单从一个视线观测一点来分析,如右图所示,这个视线上的点到曲面的距离可以定义如下,视线方向上,观测点前面的距离为负,观测点后面的距离为正。由于SDF是定义在空间中的体素里,我们这里也把距离离散化到体素里,其中d是体素宽度。由于系统误差的存在,我们给这些体素值一个权重,越靠近点云的体素权重越大。
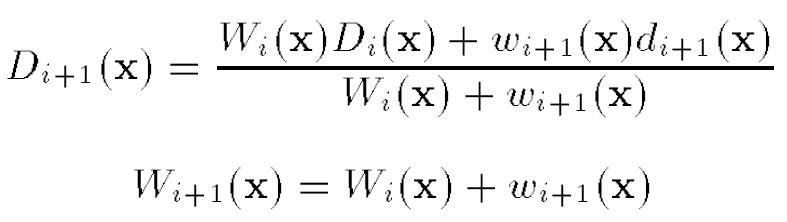
点云注册后,不断的往SDF里进行融合更新,最后把SDF的0等值面提取出来,就是融合的点云了。
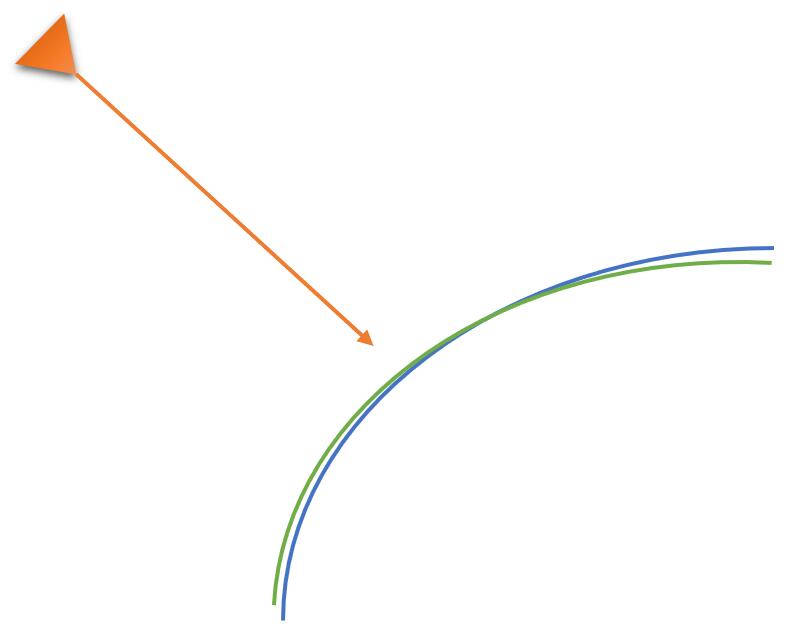
SDF把点云通过距离函数的形式,离散化到空间体素里。而它的精髓在于给距离函数定义了一个范围,这个范围使得距离函数有了一定程度的光滑性。因为Kinect数据精度是很低的,两次观测的点云,会有很大的误差,如图所示。多个点云融合在一起,如何达到平均的效果,就是通过平均距离函数来实现的。我们知道,光滑函数的叠加,也是一个光滑函数。所以,每个距离函数光滑化以后,使得融合后的距离函数也是光滑的。而这个光滑性,就使得融合点云是光滑的,并且一定程度上能消掉点云重影。
KinectFusion算法分析
下面点评一下KinectFusion算法:
- KienctFusion属于SLAM前端,高质量的点云重建还需要加入后端全局优化
- KienctFusion注册时采用了Frame-to-Model的方式,也就是采集的点云与SDF融合的点云进行注册。有时候也可以用Frame-to-Frame的方式,也就是点云与前帧点云进行注册。这样速度可以更快一些。
- 点云注册只应用了深度图像,这个算是一个优点,比如有些场景下只有深度数据。有些时候,扫描对象的几何特征不明显,如果能借助彩色图像的辅助,点云注册可以更加的稳定。
- 点云融合的时候,KinectFusion采用了SDF技术,它擅长融合低精度数据,但是开销还是比较大的。可以采用一些性能高的融合方法来替换SDF。
- 原论文里面采用了GPU加速来达到实时。根据现在的CPU性能,其实是不用GPU辅助就能达到实时的。
- KinectFusion算是三维SLAM前端的一个开始,之后出现了大量的三维SLAM前端方案,都是解决一些实际的问题,比如采集数据的质量差;扫描对象的特征不明显,这个特征包括几何特征和颜色特征;大数据量导致的质量和性能的平衡;多传感器的融合;面向移动设备的处理等。
有兴趣的读者,欢迎参考视频版本
KinectFusion 介绍的更多相关文章
- Kinect数据
原文链接 Kinect V1 和 V2 比较 Kinect V1 和 V2 的外观比较 Kinect V1 和 V2 的参数比较 Kinect V1 和 V2 随距离增加的误差分布 Kinect V1 ...
- (转) SLAM系统的研究点介绍 与 Kinect视觉SLAM技术介绍
首页 视界智尚 算法技术 每日技术 来打我呀 注册 SLAM系统的研究点介绍 本文主要谈谈SLAM中的各个研究点,为研究生们(应该是博客的多数读者吧)作一个提纲挈领的摘要.然后,我 ...
- KinectFusion解析
三维重建是指获取真实物体的三维外观形貌,并建立可复用模型的一种技术.它是当下计算机视觉的一个研究热点,主要有三方面的用途:1)相比于二维图像,可以获取更全面的几何信息:2)在VR/AR中,建立真实 ...
- 2019/02/09 对于KinectFusion 的理解
网上有很多关于Kinect Fusion 的详细介绍,包括各个部分的算法,思路,以及应用上的限制和优化. 在此就不多介绍了. KinectFusion 提供了非常基础的用RGB-D 相机实现的 Den ...
- 视觉SLAM漫谈 (三): 研究点介绍
1. 前言 读者朋友们大家好!(很久很久)之前,我们为大家介绍了SLAM的基本概念和方法.相信大家对SLAM,应该有了基本的认识.在忙完一堆写论文.博士开题的事情之后,我准备回来继续填坑:为大家介绍S ...
- CSS3 background-image背景图片相关介绍
这里将会介绍如何通过background-image设置背景图片,以及背景图片的平铺.拉伸.偏移.设置大小等操作. 1. 背景图片样式分类 CSS中设置元素背景图片及其背景图片样式的属性主要以下几个: ...
- MySQL高级知识- MySQL的架构介绍
[TOC] 1.MySQL 简介 概述 MySQL是一个关系型数据库管理系统,由瑞典MySQL AB公司开发,目前属于Oracle公司. MySQL是一种关联数据库管理系统,将数据保存在不同的表中,而 ...
- Windows Server 2012 NIC Teaming介绍及注意事项
Windows Server 2012 NIC Teaming介绍及注意事项 转载自:http://www.it165.net/os/html/201303/4799.html Windows Ser ...
- Linux下服务器端开发流程及相关工具介绍(C++)
去年刚毕业来公司后,做为新人,发现很多东西都没有文档,各种工具和地址都是口口相传的,而且很多时候都是不知道有哪些工具可以使用,所以当时就想把自己接触到的这些东西记录下来,为后来者提供参考,相当于一个路 ...
随机推荐
- echarts常用的配置项
最近使用echarts可视化的业务,但是有一些配置项需要修改,把这段时间的学习总结一下 1. 修改默认配置 a. 去掉分割线和网格线,在xAxis或者yAxis中设置 splitLine: { sho ...
- buuctf@reverse1
flag{hell0_w0rld}
- b2b推广方式有哪些-
b2b推广方式有哪些 老黄牛推广软件订做 Q:935744345 专业团队,高效推广
- python起步--windows系统下安装python解释器和PyCharm
参考教程: 1)https://www.runoob.com/w3cnote/pycharm-windows-install.html 2)https://blog.csdn.net/c_shell_ ...
- 12、label控件
label可以展示文本.超链接.图片.动图 新建项目Demo526,QMainWindow,勾选ui.将image文件夹(有2个图片)拷贝到项目路径下. [添加图像资源文件] 项目Demo526处,右 ...
- Presto部署指南
1.Presto简介说明 Presto是一个开源的分布式SQL查询引擎,适用于交互式分析查询,数据量支持GB到PB字节. Presto的设计和编写完全是为了解决像Facebook这样规模的商业数据仓库 ...
- python环境下安装opencv库的方法
注意:安装opencv之前需要先安装numpy,matplotlib等 一.安装方法 方法一.在线安装 1.先安装opencv-python pip install opencv-python --u ...
- Python中的不可变对象类型与可变对象类型
https://blog.csdn.net/answer3lin/article/details/86430074 其实各个标准资料中没有说明Python有值类型和引用类型的分类,这个分类一般是C++ ...
- Python3.X Selenium 自动化测试中如何截图并保存成功
在selenium for python中主要有三个截图方法,我们挑选其中最常用的一种. 挑最常用的:get_screenshot_as_file() 相关代码如下:(下面的代码可直接复制) # co ...
- 2019Java第十三周课程总结
这周主要是学习了监听器还有制作记事本,主要可以由一下代码来体现 监听器 实验代码 package text12; import java.awt.Container; import java.awt. ...