P4012 深海机器人问题
\(\color{#0066ff}{题目描述}\)
深海资源考察探险队的潜艇将到达深海的海底进行科学考察。
潜艇内有多个深海机器人。潜艇到达深海海底后,深海机器人将离开潜艇向预定目标移动。
深海机器人在移动中还必须沿途采集海底生物标本。沿途生物标本由最先遇到它的深海机器人完成采集。
每条预定路径上的生物标本的价值是已知的,而且生物标本只能被采集一次。
本题限定深海机器人只能从其出发位置沿着向北或向东的方向移动,而且多个深海机器人可以在同一时间占据同一位置。
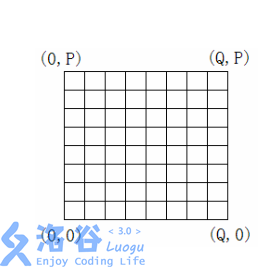
用一个 \(P\times Q\) 网格表示深海机器人的可移动位置。西南角的坐标为 \((0,0)\),东北角的坐标为 \((Q,P)\) 。
给定每个深海机器人的出发位置和目标位置,以及每条网格边上生物标本的价值。
计算深海机器人的最优移动方案, 使深海机器人到达目的地后,采集到的生物标本的总价值最高。
\(\color{#0066ff}{输入格式}\)
文件的第 \(1\) 行为深海机器人的出发位置数 \(a\),和目的地数 \(b\) 。
第 \(2\) 行为 \(P\) 和 \(Q\) 的值。
接下来的 \(P+1\) 行,每行有 \(Q\) 个正整数,表示向东移动路径上生物标本的价值,行数据依从南到北方向排列。
再接下来的 \(Q+1\) 行,每行有 \(P\) 个正整数,表示向北移动路径上生物标本的价值,行数据依从西到东方向排列。
接下来的 \(a\) 行,每行有 \(3\) 个正整数 \(k,x,y\),表示有 \(k\) 个深海机器人从 \((x,y)\) 位置坐标出发。
再接下来的 \(b\) 行,每行有 \(3\) 个正整数 \(r,x,y\) ,表示有 \(r\) 个深海机器人可选择 \((x,y)\) 位置坐标作为目的地。
\(\color{#0066ff}{输出格式}\)
输出采集到的生物标本的最高总价值.
\(\color{#0066ff}{输入样例}\)
1 1
2 2
1 2
3 4
5 6
7 2
8 10
9 3
2 0 0
2 2 2
\(\color{#0066ff}{输出样例}\)
42
\(\color{#0066ff}{数据范围与提示}\)
\(1\leq P,Q\leq 15\)
\(1\leq a\leq 4\)
\(1\leq b\leq 6\)
\(\color{#0066ff}{题解}\)
S向所有机器人起点连边
所有机器人终点向T连边
每个点向右向下分别连两条边
一条容量为 1 ,边权为图中边权
另一条容量为 inf,边权为零
这样保证了权值只能获得一次,又保证了这条边可以被多个人走
#include <cstdio>
#include <iostream>
#include <cstring>
#include <algorithm>
#include <queue>
#include <cmath>
#define _ 0
#define LL long long
#define int long long
inline LL in() {
LL x = 0, f = 1; char ch;
while(!isdigit(ch = getchar()))(ch == '-') && (f = -f);
while(isdigit(ch)) x = x * 10 + (ch ^ 48), ch = getchar();
return x * f;
}
const int maxn = 105050;
struct node {
int to, dis, can;
node *nxt, *rev;
node(int to = 0, int dis = 0, int can = 0, node *nxt = NULL):to(to), dis(dis), can(can), nxt(nxt) {}
void *operator new (size_t) {
static node *S = NULL, *T = NULL;
return (S == T) && (T = (S = new node[1024]) + 1024), S++;
}
};
const int inf = 0x7fffffff;
int n, m, p, q, s, t;
typedef node* nod;
bool vis[maxn];
nod head[maxn], road[maxn];
int dis[maxn], change[maxn], id[55][55];
std::queue<int> V;
inline void add(int from, int to, int can, int dis) {
nod o = new node(to, dis, can, head[from]);
head[from] = o;
}
inline void link(int from, int to, int can, int dis) {
add(from, to, can, dis);
add(to, from, 0, -dis);
head[from]->rev = head[to];
head[to]->rev = head[from];
}
inline bool spfa()
{
for(int i = s; i <= t; i++) dis[i] = -inf, change[i] = inf;
V.push(s);
dis[s] = 0;
while(!V.empty()) {
int tp = V.front(); V.pop();
vis[tp] = false;
for(nod i = head[tp]; i; i = i->nxt) {
if(dis[i->to] < dis[tp] + i->dis && i->can > 0) {
dis[i->to] = dis[tp] + i->dis;
road[i->to] = i;
change[i->to] = std::min(change[tp], i->can);
if(!vis[i->to]) vis[i->to] = true, V.push(i->to);
}
}
}
return change[t] != inf;
}
inline void mcmf() {
int cost = 0;
while(spfa()) {
cost += dis[t] * change[t];
for(int o = t; o != s; o = road[o]->rev->to) {
road[o]->can -= change[t];
road[o]->rev->can += change[t];
}
}
printf("%lld", cost);
}
signed main() {
n = in(), m = in(), p = in(), q = in();
for(int cnt = 0, i = 0; i <= p; i++)
for(int j = 0; j <= q; j++)
id[i][j] = ++cnt;
s = 0, t = id[p][q] + 1;
for(int i = 0; i <= p; i++)
for(int j = 0; j < q; j++)
link(id[i][j], id[i][j+1], 1, in());
for(int i = 0; i <= q; i++)
for(int j = 0; j < p; j++)
link(id[j][i], id[j+1][i], 1, in());
int k, x, y;
for(int i = 1; i <= n; i++) {
k = in(), x = in(), y = in();
link(s, id[x][y], k, 0);
}
for(int i = 1; i <= m; i++) {
k = in(), x = in(), y = in();
link(id[x][y], t, k, 0);
}
for(int i = 0; i <= p; i++)
for(int j = 0; j <= q; j++) {
if(i + 1 <= p) link(id[i][j], id[i+1][j], inf, 0);
if(j + 1 <= q) link(id[i][j], id[i][j+1], inf, 0);
}
mcmf();
return 0 ;
}
P4012 深海机器人问题的更多相关文章
- 洛谷 P4012 深海机器人问题【费用流】
题目链接:https://www.luogu.org/problemnew/show/P4012 洛谷 P4012 深海机器人问题 输入输出样例 输入样例#1: 1 1 2 2 1 2 3 4 5 6 ...
- luogu P4012 深海机器人问题
luogu P4012 深海机器人问题 // luogu-judger-enable-o2 #include<queue> #include<cstdio> #include& ...
- (luogu P4012)深海机器人问题 [TPLY]
网页链接 https://www.luogu.org/problemnew/show/4012 做题背景 在不久的将来,人工智能发展使得人类大量失业,也使得现在的我们做[深海机器人问题]做得想死... ...
- 洛谷P4012 深海机器人问题(费用流)
题目描述 深海资源考察探险队的潜艇将到达深海的海底进行科学考察. 潜艇内有多个深海机器人.潜艇到达深海海底后,深海机器人将离开潜艇向预定目标移动. 深海机器人在移动中还必须沿途采集海底生物标本.沿途生 ...
- 洛谷P4012 深海机器人问题(费用流)
传送门 图给的好坑……还得倒过来…… 用大佬的图做个示范 我们考虑左图吧 把每一个点向下连边,容量$1$,费用为给出的价值(表示一个机器人可以过去取得标本) 再连一条边,容量$inf$,费用$0$(表 ...
- 洛谷 P4012 深海机器人问题 【最大费用最大流】
和火星那个有点像,但是这个价值直接在路径上,不用拆点,对于每条价值为w的边(i,j),连接(i,j,1,w)(i,j,inf,0),表示价值只能取一次,然后连接源点和所有出发点(s,i,k,0),所有 ...
- [洛谷P4012] [网络流24题] 深海机器人问题
Description 深海资源考察探险队的潜艇将到达深海的海底进行科学考察. 潜艇内有多个深海机器人.潜艇到达深海海底后,深海机器人将离开潜艇向预定目标移动. 深海机器人在移动中还必须沿途采集海底生 ...
- 【网络流24题】No. 20 深海机器人问题 (费用流)
[题意] 深海资源考察探险队的潜艇将到达深海的海底进行科学考察.潜艇内有多个深海机器人. 潜艇到达深海海底后, 深海机器人将离开潜艇向预定目标移动. 深海机器人在移动中还必须沿途采集海底生物标本. 沿 ...
- 【刷题】LOJ 6224 「网络流 24 题」深海机器人问题
题目描述 深海资源考察探险队的潜艇将到达深海的海底进行科学考察. 潜艇内有多个深海机器人.潜艇到达深海海底后,深海机器人将离开潜艇向预定目标移动. 深海机器人在移动中还必须沿途采集海底生物标本.沿途生 ...
随机推荐
- jdk中那些常见的类不能被继承的
对于java中的类,如果是使用final修饰的话,那么这个类就不能够被继承,因为jdk的开发者认为,有一些最基本的类没要必要对开发者开放,如果用户 继承时操作有误,很可能引入很多问题.为了防止用户对基 ...
- [摘]Android逆向分析常用网站
androidterm: Android Terminal Emulator http://code.google.com/p/androidterm/ droidbox: Andro ...
- 2015.1.15 利用Oracle函数返回表结果 重大技术进步!
-- sql 调用 select * from table( get_airway_subpoint(x,x,x)) ///////////////////////////////////////// ...
- Django 学习之---静态文件处理详解
前言: 1.静态文件是指 网站中的 js, css, 图片,视频等文件 2.静态文件放在对应的 app 下的 static 文件夹中 或者 STATICFILES_DIRS 中的文件夹中. 当 DEB ...
- DAY12-前端之HTML
一.html初识 web服务本质 import socket def main(): sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM) ...
- hibernate学习笔记(5)在数据库中存取图片
如何从数据库读取存入的图片,即Blob(二进制)数据. 先从数据库读取对象. 再从获取的对象中得到blob对象. 通过blob对象的getBinaryStream()方法获取input输出流. 之后通 ...
- 第三天:Servlet运行原理
1. 如何不重启tomcat就可以重新加载一个web应用?? 方法:进入tomcat的manager之后点击reload即可. 2.开发一个Servlet,该Servlet可以输出自己的名字并显示当 ...
- [poj3041]Asteroids(二分图的最小顶点覆盖)
题目大意:$N*N$的网格中有$n$颗行星,若每次可以消去一整行或一整列,求最小的攻击次数使得消去所有行星. 解题关键:将光束当做顶点,行星当做连接光束的边建图,题目转化为求该图的最小顶点覆盖,图的最 ...
- webfrom 母版页
ASP.NET中母版页作用 一是提高代码的复用(把相同的代码抽出来) 二是使整个网站保持一致的风格和样式. 母版页存在就一定要有内容页的存在,否则母版页的存在就没有了意义. .master 一.添加母 ...
- varnish安装
安装pcrevarnish 依赖pcre进行url正则匹配. cd pcre-8.12./configure --prefix=/usr/local/make&&make instal ...