经典视觉SLAM框架
经典视觉SLAM框架
整个视觉SLAM流程包括以下步骤:
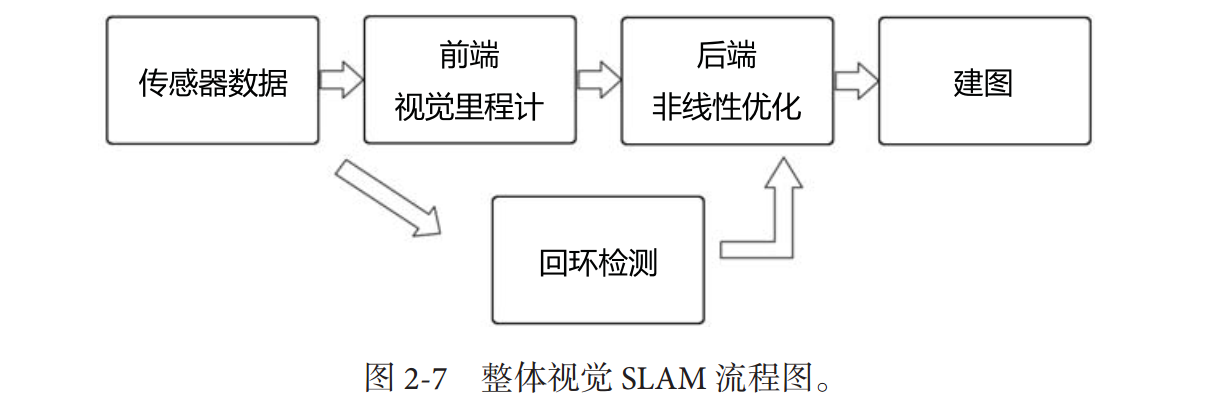
1. 传感器信息读取。在视觉SLAM中主要为相机图像信息的读取和预处理。
2. 视觉里程计(Visual Odometry,VO)。视觉里程计的任务是估算相邻图图像间相机的运动,以及局部地图的样子。VO又称为前段。
3. 后端优化(Optimization)。后端接受不同时刻视觉里程计测量的相机位姿以及回环检测的信息,对他们进行优化,得到全局一致的轨迹和地图。由于接在VO之后,又称为后端。
4. 回环检测(Loop Closing)。回环检测判断机器人是否到达过先前的位置。如果检测到回环,他会把信息提供给后端进行处理。
5. 建图(Mapping)。他根据估计的轨迹,建立与任务要求对应的地图。
视觉里程计(Visual Odometry,VO):
VO能够通过相邻帧间的图像估计相机运动,并回复场景的空间结构。称他为“里程计”是因为他和实际的里程计一样,只估计相邻时刻的运动,而和再往前的过去的信息没有关联。在这一点上,VO就像一种只有短时间记忆的物种。
由于视觉里程计(在最简单的情况下)只估计两个图像间的运动将会造成累计飘逸(Accumulating Drift)。因为每次估计都带有一定的误差。而由于里程计的工作方式,先前时刻的误差将会传递到下一时刻,导致经过一段时间之后,估计的轨迹将不再准确。
这就是所谓的飘逸(Drift)。为了解决飘逸问题,我们还需要两种技术:后端优化和回环检测。
后端优化(Optimization):
笼统地说,后端优化主要处理SLAM过程中噪声的问题。在视觉SLAM中,前段和计算机视觉研究领域更为相关,比如故乡的特征提取和匹配等,后端则主要是滤波和非线性优化算法。
SLAM问题的本质:对运动主体自身和周围环境空间不确定性的估计。
回环检测(Loop Closing):
本质:计算图像相似性的算法。
建图(Mapping)
构建的地图分为度量地图和拓扑地图:
经典视觉SLAM框架的更多相关文章
- 高翔《视觉SLAM十四讲》从理论到实践
目录 第1讲 前言:本书讲什么:如何使用本书: 第2讲 初始SLAM:引子-小萝卜的例子:经典视觉SLAM框架:SLAM问题的数学表述:实践-编程基础: 第3讲 三维空间刚体运动 旋转矩阵:实践-Ei ...
- 《视觉SLAM十四讲》学习日志(二)——初识SLAM
小萝卜机器人的例子: 就像这种机器人,它的下面有一组轮子,脑袋上有相机(眼睛),为了让它能够探索一个房间,它需要知道: 1.我在哪——定位 2.周围环境怎么样——建图 定位和建图可以理解成感知的 &q ...
- 《视觉SLAM十四讲》第2讲
目录 一 视觉SLAM中的传感器 二 经典视觉SLAM框架 三 SLAM问题的数学表述 注:原创不易,转载请务必注明原作者和出处,感谢支持! 本讲主要内容: (1) 视觉SLAM中的传感器 (2) 经 ...
- 视觉slam领域经典综述和具体应用场景
一.经典综述文章 1. Durrant-Whyte H, Bailey T. Simultaneous localization and mapping: part I[J]. IEEE robot ...
- 视觉SLAM算法框架解析(1) PTAM
版权声明:本文为博主原创文章,未经博主允许不得转载. 本系列文章旨在总结主流视觉SLAM算法的框架,对比各个算法在子模块的差异,最终提炼出融合各个算法优点的架构. PTAM[1]是视觉SLAM领域里程 ...
- 转:SLAM算法解析:抓住视觉SLAM难点,了解技术发展大趋势
SLAM(Simultaneous Localization and Mapping)是业界公认视觉领域空间定位技术的前沿方向,中文译名为“同步定位与地图构建”,它主要用于解决机器人在未知环境运动时的 ...
- 83 项开源视觉 SLAM 方案够你用了吗?
作者:吴艳敏 来源:83 项开源视觉 SLAM 方案够你用了吗? 前言 1. 本文由知乎作者小吴同学同步发布于https://zhuanlan.zhihu.com/p/115599978/并持续更新. ...
- (转) SLAM系统的研究点介绍 与 Kinect视觉SLAM技术介绍
首页 视界智尚 算法技术 每日技术 来打我呀 注册 SLAM系统的研究点介绍 本文主要谈谈SLAM中的各个研究点,为研究生们(应该是博客的多数读者吧)作一个提纲挈领的摘要.然后,我 ...
- 视觉SLAM中相机详解
视觉SLAM中,通常是指使用相机来解决定位和建图问题. SLAM中使用的相机往往更加简单,不携带昂贵的镜头,以一定的速率拍摄周围的环境,形成一个连续的视频流. 相机分类: 单目相机:只是用一个摄像头进 ...
随机推荐
- Game HDU - 3389 (博弈论)
Bob and Alice are playing a new game. There are n boxes which have been numbered from 1 to n. Each b ...
- (线性DP LIS)POJ2533 Longest Ordered Subsequence
Longest Ordered Subsequence Time Limit: 2000MS Memory Limit: 65536K Total Submissions: 66763 Acc ...
- (叉积,线段判交)HDU1086 You can Solve a Geometry Problem too
You can Solve a Geometry Problem too Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/3 ...
- python自动化开发-[第十八天]-django的ORM补充与ajax,分页器
今日概要: 1.ORM一对多,多对多 2.正向查询,反向查询 3.聚合查询与分组查询 4.F查询和Q查询 5.ajax 6.分页器 一.ORM补充: django在终端打印sql语句设置: LOGGI ...
- python对象初始化
当python对象被创建以后,需要将对象进行初始化.Python有一个构造函数和一个初始化函数: 1.构造函数__new__,只接受一个参数,即类本身(它会在对象被构造之前调用,所以这里也就没有sel ...
- JSON语法、对象、遍历数组的区别和基本操作
JSON 语法规则 JSON 语法是 javascript 对象表示语法的子集. 数据在名称/值对中 数据由逗号分隔 花括号保存对象 方括号保存数组 JSON 名称/值对 JSON 数据的书写格式是: ...
- MySQL数据库优化_limit_1
转自:https://blog.csdn.net/cbjcry/article/details/70155118 1. MySQL中,在某些情况下,如果明知道查询结果只有一个,SQL语句中使用LIMI ...
- CentOS 安装最新版本 Git
查看默认 yum 源的 git版本 # 安装 yum install -y git # 查看版本 git version # git version 1.8.3.1 参看官网,CentOS 安装新版本 ...
- C#设计模式(0)——设计原则
设计原则 使用设计模式的根本原因是适应变化,提高代码复用率,使软件更具有可维护性和可扩展性.在进行设计的时候,我们需要遵循以下几个原则:单一职责原则.开闭原则.里氏替代原则.依赖倒置原则.接口隔离原则 ...
- log4j 基础教程【转】
参考引用自: http://javacrazyer.iteye.com/blog/1135493 我的git地址: https://git.oschina.net/KingBoBo/Log4JDemo ...