ROS-多机通信
前言:一定要在同一路由的局域网下进行,就是两台电脑的ip要像这样:192.168.191.4和192.168.191.8,只有最后一位不同,这样就能ping通了,否则ping不同。
一、查看ip和主机名
1.1 查看ip:
ifconfig
-----------------------------------------
显示如下:
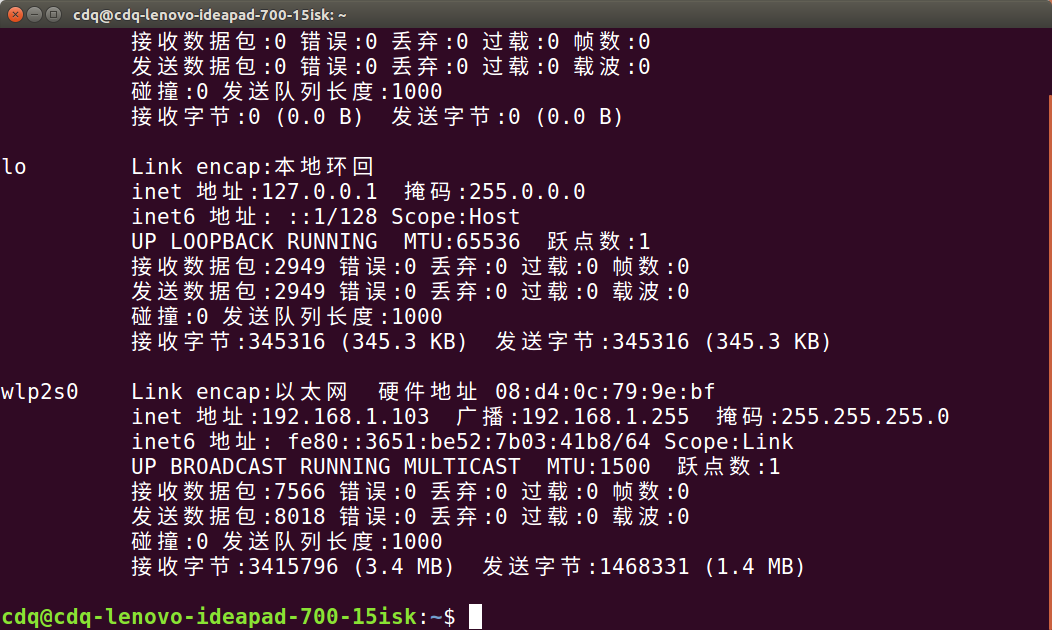
其中,lo是网线连接情况下的id,下边的wlp2s0是无线连接情况下的ip地址.
分别查看两台电脑的ip地址并用笔记本记录下来.一定要在同一局域网下进行!
1.2 查看主机名
hostname
分别查看两台电脑的ip地址并用记录下来.
这里说明一下,如果在"关于这台计算机"的选项里修改了名字后,导致没有了管理员权限,每次打开终端都会提示:To run a command.......
遇到这种情况,输入如下代码可以解决:
touch ~/.sudo as admin successful
二、修改host文件
2.1 打开host文件:
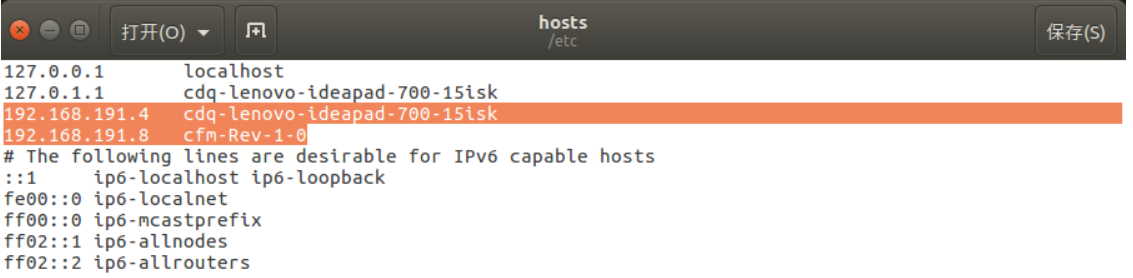
gksu gedit /etc/hosts
2.2 修改host文件
按照如下形式分别在两台电脑上添加ip和主机名:
2.3 重启网络:
两台电脑都需要重启网络。
sudo /etc/init.d/networking restart
三、实现通信
3.1 在两台电脑上装上chrony包:
sudo apt-get install chrony
3.2 在两台电脑上都安装ssh服务器:
sudo apt-get install openssh-server
3.3 确认服务器是否已经启动:
ps -e|grep ssh
如果看到sshd则说明ssh-server已经启动.
3.4 检测是否双向连通:
先ssh自己的主机名:
ssh one_name
然后ping另一台电脑的主机名:
ping tow_name
-----------------------------------------
显示如下:

接着在另一台机器操作:
ssh tow_name ping one_name
-----------------------------------------
显示如下:

如果两台机器都出现如上结果,说明双向连通,只要有一个没出现下边的结果就是没有连接成功,而多级通信必须保证双向连通.
3.5 修改.bashrc文件
在两台电脑上都使用下面的命令来编辑.bashrc文件:
gedit ~/.bashrc
在A端这边的bashrc文件的最后添加:
export ROS_HOSTNAME=one_hostname export ROS_MASTER_URI=http://one_hostname:11311
-----------------------------------------
解析:
第一条是本机的主机名
第二条 是主机,也就是要运行roscore节点的电脑端的主机名
在B端这边的bashrc文件的最后添加:
export ROS_HOSTNAME=tow_hostname export ROS_MASTER_URI=http://one_hostname:11311
注意:两台机器的export ROS_MASTER_URI=http://one_hostname:11311这条是一样的.
四、验证
4.1 电脑A端
首先在主机,启动 ROS:$ roscore 然后运行:
rosrun turtlesim turtlesim_node
4.2 电脑B端
rosrun turtlesim turtle_teleop_key
现在,你可以在电脑B端控制A上的小乌龟移动啦!
-END-
ROS-多机通信的更多相关文章
- ROS多机通信计算机网络配置
以实现master和nico的互联共享信息为例 1 查看IP地址 $ifconfig 查看ip地址 可以看到 master的IP为192.168.1.10 nico的IP为192.168.1.103 ...
- [转]在ROS下使用zeroconf配置多机通信
原文地址:http://www.corvin.cn/635.html,转载主要方便随时查阅,如有版权要求,请及时联系. 0x00 为何需要配置ROS多机通信 众所周知ROS是分布式系统,因此可以将机器 ...
- 与POS机通信时的3DES(双倍长)加密解密
项目中有个SocketServer要和移动便携POS机通信,POS开发商就告诉我们他们用的3DES(双倍长)加密,给了个Key.数据和结果,让我们实现. c#用TripleDESCryptoServi ...
- Vmware虚拟机网络模式及虚拟机与物理机通信方法
[转]http://www.cqeis.com/news_detail/newsId=1477.html Vmware虚拟机软件是一个“虚拟PC”软件,它使你可以在一台机器上同时运行二个或更多Wind ...
- ros与下位机通信常用的c++ boost串口应用
一.首先移植c++ boost 库: 1. 先去 Boost官网 下载最新的Boost版本, 我下载的是boost_1_6_0版本, 解压. 2. 进入解压后目录: cd boost_1_6_0, 执 ...
- ros与下位机通信常用的c++ boost串口应用--22
摘要: 原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 一.首先移植c++ boost 库: 1. 先去 Boost官网 下载最新的Boost版本, 我 ...
- UR机器人通信--上位机通信(python)
一.通信socket socket()函数 Python 中,我们用 socket()函数来创建套接字,语法格式如下: socket.socket([family[, type[, proto]]]) ...
- CentOS安装etcd和flannel实现Docker跨物理机通信
1.安装etcd yum install etcd systemctl stop etcd systemctl start etcd systemctl status etcd systemctl e ...
- etcd和flannel实现docker跨物理机通信
实验目标 跨物理机的容器之间能直接访问docker通过Flannel可以实现各容器间的相互通信,即宿主机和容器,容器和容器之间都能相互通信 实验环境 192.168.3.50 //etcd.flann ...
随机推荐
- TensorFlow-LSTM序列预测
问题情境:已知某一天内到目前为止股票各个时刻的价格,预测接下来短时间内的价格变化. import tushare as ts import time from collections import n ...
- Android 解决toolbar标题不显示问题
问题原因:toolbar的兼容性有问题 解决办法: setSupportActionBar(toolbar); toolbar使用步骤: 1.编写menu.xml 为了保持兼容需要这样写: andro ...
- hdu 3729 最大匹配
此题是我AC的HDU的201道题目.泪流满面啊! 字典序最大(最小)真是个烦人的东西. 学生i与其对应的分数区间的每个点连一条边.字典序最大,编号最大的学生开始匹配. HK无法AC啊,试了很久.我不会 ...
- TypeScript简单的代码片段
TypeScript中,接口.接口实现.函数重载: interface IThing{ name:string; age:number; sayHello:{ (name:string):string ...
- Service、chkconfig命令
转自:http://my.oschina.net/phptiger86/blog/137656
- js 获取 下拉框的值
//错误 console.log($("#DictID").select.val()); //错误 console.log($("#DictID").selec ...
- Selenium3+python自动化008-常用操作
一.元素常用操作 1. clear() 清除文本 2. send_keys() 模拟输入 3. click() 单击元素 4.get_attr ...
- setTimeout()传带有参数的函数
w3cshool里的解释:setTimeout() 方法用于在指定的毫秒数后调用函数或计算表达式,语法:setTimeout(code,millisec). 也就是说,第一个参数可以是字符串形式的Ja ...
- Js判断一个字符串是否包含一个子串
Js中经常遇到判断一个字符串是否包含一个子串,java语言中有containes的方法,直接调用就可以了.除非引用第三方数据库,Js中没有contains方法. 为了实现更java语言中contain ...
- 【LibreOJ 6279】 数列分块入门 3 (分块)
传送门 code: //By Menteur_Hxy #include<cstdio> #include<iostream> #include<algorithm> ...