RVO算法
http://blog.sina.com.cn/s/blog_6ad33d350102xqal.html
简介
在介绍VO,RVO之前,需要先介绍路径规划。
对Agent进行路径规划,实际上要完成的任务就是让Agent从点A无碰撞地移动到点B。而路径规划的过程是层次化的,其基本框架大致如下:
- High level:
dijkstra等算法。
- Low level:
VO, RVO, ORCA等底层避障算法。
- High level:
通过dijkstra算法,得到路径为: 教学楼→饭堂→体育馆→图书馆→宿舍楼。
- Low level:
通过底层避障算法如VO,RVO,ORCA等底层避障算法,保证我们走的每一段路(e.g. 教学楼→饭堂),都不会跟别的同学发生碰撞。
- VO是指速度方向与B¯B¯相交的部分,即会发生碰撞的部分(图中灰色斜线部分)。
- VO是抱着宁杀错,不放过的思想,把所有未来有可能会发生碰撞的速度都放弃了。
- 实际上假如仅要求一定时间内不发生碰撞的话,有更多的速度可供选择,比如说上图中的(v′AvA′)。
- 物体A(B):以pApA为圆心,rArA为半径的点集AA
- 假设B静止:A相对于B的速度,即相对速度vA−vBvA−vB
- 把A化作质点:求集合BB与集合−A−A的Minkowski
sum,即闵氏和,B⊕−AB⊕−A,其中
- A⊕B={a+b | a∈A,b∈B}A⊕B={a+b | a∈A,b∈B}
- −A={−a | a∈A}−A={−a | a∈A}
- 首先给出射线的定义,用λ(p,v)λ(p,v)表示以点pp为顶点,方向为vv的射线。
- λ(p,v)={p+tv|t≥0}λ(p,v)={p+tv|t≥0}
- 接下来就是VO的定义了,用VOAB(vB)VOBA(vB)表示速度为vBvB的BB对AA的VO
- VOAB(vB)={vA|λ(pA,vA−vB)∩B⊕−A≠∅}VOBA(vB)={vA|λ(pA,vA−vB)∩B⊕−A≠∅}
- 抖动现象:如下左图所示,即AA会在vAvA与v′AvA′之间来回切换
- RVO的效果:如下右图所示,保持vAvA,不会抖动
![]()
- Symmetry:vAvA的AA会撞上vBvB的BB,则vBvB的BB也会撞上vAvA的AA
- vA∈VOAB(vB)⇔vB∈VOBA(vA)vA∈VOBA(vB)⇔vB∈VOAB(vA)
- Translation Invariance:vAvA的AA会撞上vBvB的BB,则vA+uvA+u的AA会撞上vB+uvB+u的BB
- vA∈VOAB(vB)⇔vA+u∈VOAB(vB+u)vA∈VOBA(vB)⇔vA+u∈VOBA(vB+u)
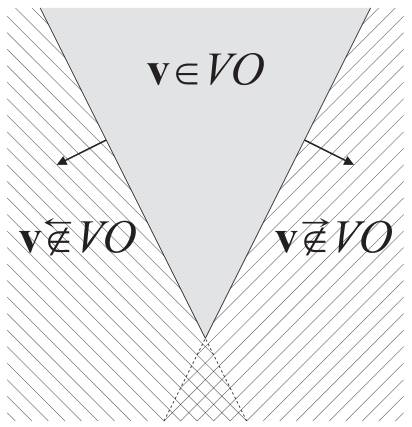
- Convexity:在VOAB(vB)VOBA(vB)的左(右)侧的两个速度之间的任意速度,也在VOAB(vB)VOBA(vB)的左(右)侧。VO左(右)侧如下图所示:
- vA∉→VOAB(vB)∧v′A∉→VOAB(vB)⇒(1−α)vA+αv′A∉→VOAB(vB), for 0≤α≤1vA∉→VOBA(vB)∧vA′∉→VOBA(vB)⇒(1−α)vA+αvA′∉→VOBA(vB), for 0≤α≤1
- 假设初始状态为会发生碰撞:vA∈VOAB(vB), vB∈VOBA(vA)vA∈VOBA(vB), vB∈VOAB(vA)
- 由于在对方的VO内,所以各自选择新的速度以防止碰撞:v′A∉VOAB(vB), v′B∉VOBA(vA)vA′∉VOBA(vB), vB′∉VOAB(vA)
- 由前面VO的Symmetry性质可知:此时,原来的速度不在当前速度的VO内:vB∉VOBA(v′A), vA∉VOAB(v′B)vB∉VOAB(vA′), vA∉VOBA(vB′)
- 假设我们更加prefer原来的速度,则又会回到原来的vAvA与vBvB
- 于是在1→4之间循环,即发生抖动
- 缩小VO的大小,新的”VO”就叫做RVO
- p.s. 我个人对Reciprocal的理解是:相对于VO完全把对方当做木头,RVO假设对方在避障中也会承担一定责任,所以不用完全靠自己改变速度来走出VO,有种互相合作避障的感觉。
- 或者换一个角度理解,不再直接选择VO外的速度v′AvA′作为新的速度,而是average当前速度vAvA与VO外的速度v′AvA′
- 速度为vBvB的BB对速度为vAvA的AA产生的RVO为:
- 图示理解如下:
![]()
- 释意:
- 2v′A−vA2vA′−vA:vAvA相对于v′AvA′的对称点。
- 所以公式的含义是:对称点在原VO中,则中点在RVO中。
- 所以RVO的构成是:vAvA与原VO中的点的中点。
- 双方选择同侧避障时,不会发生碰撞。
- 双方一定会选择同侧避障。
- 不会有抖动现象:原来会撞的在选择新速度后依然会撞。
- 用数学语言来描述问题:化作质点的描述、抖动的描述。
- 从实际应用中发现问题:抖动问题的发现。
- 特殊到一般的推广:论文后面还将RVO推广到一般情况,很漂亮的推广。
很容易可以跟我们的日常生活进行类比,比如说我们要从学校的教学楼走到宿舍楼,那么以上框架对应的就是:
VO和RVO就是经典的底层避障算法。其中VO是最经典的,RVO则在VO的基础上进行了一些改进,解决了VO抖动的问题。
VO(Velocity Obstacle)
一句话总结VO的思路:只要在未来有可能会发生碰撞的速度,都排除在外。
为方便描述,以下都假设是在平面内,圆形物体之间的避障。
VO的直观理解
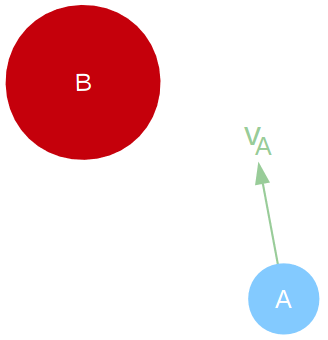
Q: 假设B静止,那么A取什么速度能够保证一定不会跟B发生碰撞呢?
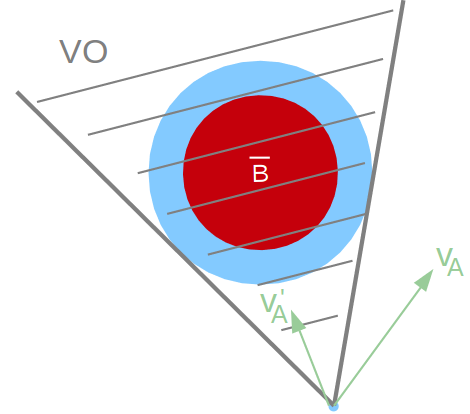
A: 一种很粗暴的方法,就是把A化作质点,选择跟B¯B¯(扩展后的B)不相交的速度方向。以后只要在每个周期里面,都选择不在VO的速度,就能够保证不会碰撞。
以上就是VO的直观理解,需要注意的是:
VO的图示理解
有了直观理解之后就可以用更加严谨一点的数学语言图示VO了。
首先将直观理解中口语化的表达转换成对应的数学语言表示。
于是就有了下图的左半部分(浅色三角形):
而为了直接求vAvA绝对速度的VO而不是vA−vBvA−vB相对速度的VO,将相对速度下的VO延vBvB方向平移,就有了图中右半部分(深色三角形)。
VO的数学定义
理解了图示,数学定义就很好理解了。
RVO(Reciprocal Velocity Obstacle)
VO给出了很漂亮的避障条件,所以后面很多底层的避障算法都是基于VO的,而RVO就是其中之一。
RVO主要解决了VO的抖动问题
证明VO抖动现象存在
首先论文给出了VO的三条性质
![]()
{kind=link}
接下来是抖动现象存在的证明
RVO的Insight
首先回想一下为什么会发生抖动:
双方为了避障,都偏移了当前速度太多,导致更新速度后,原来速度不再会发生碰撞。
那么我们有没有办法减少对当前速度的偏移,同时又能保证避障呢,RVO的回答是肯定的:
RVO的定义与图示
RVOAB(vB,vA)={v′A | 2v′A−vA∈VOAB(vB)}RVOBA(vB,vA)={vA′ | 2vA′−vA∈VOBA(vB)}
RVO不会发生碰撞且没有抖动现象的证明
这一部分不赘述了,论文中写得很详尽,只说一下证明的思路:
收获
References
RVO算法的更多相关文章
- RTS寻路相关资料收集
http://www.cocoachina.com/game/20150824/13174.html RVO算法 RVO避开agent
- 如何制作RTS游戏的寻路系统?
Q1:我们在做一个RTS游戏,开始用的是Unity自带的NavMesh的寻路,但发现这个并不适合RTS多人寻路,因为总会出现阻挡和闪跳的问题.看Asset Store上的A* path插件评论说在碰撞 ...
- GameUnity 2.0 文档(五) 人工智能之---------------Flocking算法 (聚集,分散,列队 )
AI是游戏的灵魂,是人物的智商,是让玩家觉得游戏是否幼稚的重要判断功能,下面我将介绍国外流行,国内不行的,ai算法. 主要介绍 Flocking 和 Reciprocal Velocity Obs ...
- B树——算法导论(25)
B树 1. 简介 在之前我们学习了红黑树,今天再学习一种树--B树.它与红黑树有许多类似的地方,比如都是平衡搜索树,但它们在功能和结构上却有较大的差别. 从功能上看,B树是为磁盘或其他存储设备设计的, ...
- 分布式系列文章——Paxos算法原理与推导
Paxos算法在分布式领域具有非常重要的地位.但是Paxos算法有两个比较明显的缺点:1.难以理解 2.工程实现更难. 网上有很多讲解Paxos算法的文章,但是质量参差不齐.看了很多关于Paxos的资 ...
- 【Machine Learning】KNN算法虹膜图片识别
K-近邻算法虹膜图片识别实战 作者:白宁超 2017年1月3日18:26:33 摘要:随着机器学习和深度学习的热潮,各种图书层出不穷.然而多数是基础理论知识介绍,缺乏实现的深入理解.本系列文章是作者结 ...
- 红黑树——算法导论(15)
1. 什么是红黑树 (1) 简介 上一篇我们介绍了基本动态集合操作时间复杂度均为O(h)的二叉搜索树.但遗憾的是,只有当二叉搜索树高度较低时,这些集合操作才会较快:即当树的高度较高(甚至一种极 ...
- 散列表(hash table)——算法导论(13)
1. 引言 许多应用都需要动态集合结构,它至少需要支持Insert,search和delete字典操作.散列表(hash table)是实现字典操作的一种有效的数据结构. 2. 直接寻址表 在介绍散列 ...
- 虚拟dom与diff算法 分析
好文集合: 深入浅出React(四):虚拟DOM Diff算法解析 全面理解虚拟DOM,实现虚拟DOM
随机推荐
- Windows 安装nginx
http://nginx.org/en/docs/windows.html 在nginx.exe目录,打开命令行工具,用命令 启动/关闭/重启nginx start nginx : 启动ngin ...
- Discuz!支持发布视频帖子设定 + 修改后台文件
最近想做一个地方性论坛,果断在阿里巴巴的phpwind论坛程序与腾讯旗下的discuz论坛程序中选择,虽然phpwind大气,后面还是 决定选择了discuz程序用来构建这个平台,经过一番安装后,发现 ...
- 20170326 ABAP调用外部webservice 问题
1.SE80 创建企业服务: 代理生成:出现错误 库处理程序中出现例外 错误的值:未知类型参考ns1:ArrayOfMLMatnrResource 尝试: 一.测试本地文件:---无效 1. 将网址链 ...
- 常用js方法函数
常用方法函数 1.深复制 // 1.深复制 function deepCopy(source) { var result = {}; for (var key in source) { result[ ...
- 一个商品SKU是怎么生成的
首先说一说什么是SKU.......自己百度去... 类似京东上面,未来人类S5这个台笔记本(没错,我刚入手了) 都是S5这个型号,但是因为CPU,显卡,内存,硬盘等不同,价格也不一样.CPU,显卡, ...
- linux 下 监控系统运行状况 命令 dstat
推荐读文:https://linux.cn/article-3215-1.html
- WebStorm中SVN配置
近期在使用WebStorm进行网页开发,值得一提的是WebStorm的确是一个不错的IDE,尽管可能内存开销较大,但是在编写JS的时候提供了很多包括自动完成等强大的功能. 好了,步入正题:在实际项目开 ...
- IDEAL葵花宝典:java代码开发规范插件:GsonFormat插件将JSONObject格式的String 解析成实体
前言: GsonFormat插件主要用于使用Gson库将JSONObject格式的String 解析成实体,该插件可以加快开发进度,使用非常方便,效率高. 这个教程主要是学习IntelliJ IDEA ...
- NOIP 2016【蚯蚓】
好吧,我承认我是个智障-- 这道题一眼看上去就是个堆,然而实际上有单调性. 注意到,如果 \(q = 0\) 的话,将蚯蚓的左右两边分开丢进两个队列中,则两个队列都是单调不增的,因为每次取出的蚯蚓长度 ...
- 深度学习在gilt应用——用图像相似性搜索引擎来商品推荐和服务属性分类
机器学习起源于神经网络,而深度学习是机器学习的一个快速发展的子领域.最近的一些算法的进步和GPU并行计算的使用,使得基于深度学习的算法可以在围棋和其他的一些实际应用里取得很好的成绩. 时尚产业是深度学 ...