Simulating a Freight robot in Gazebo
Installation
Before installing the simulation environment, make sure your desktop is setup with a standard installation of ROS Indigo on Ubuntu 14.04. Once your APT repositories are configured, you can install the simulator:
$ sudo apt-get update
$ sudo apt-get install ros-indigo-fetch-gazebo-demo
Warning
Never run the simulator on the robot. Simulation requires that the ROS parameter use_sim_time be set to true, which will cause the robot drivers to stop working correctly. In addition, be sure to never start the simulator in a terminal that has the ROS_MASTER_URI set to your robot for the same reasons.
Starting the Simulator
The fetch_gazebo and fetch_gazebo_demo packages provide the Gazebo environment for Fetch. fetch_gazebo includes several launch files:
- simulation.launch spawns a robot in an empty world.
- playground.launch spawns a robot inside a lab-like test environment. This environment has some tables with items that may be picked up and manipulated. It also has a pre-made map which can be used to test out robot navigation and some simple demonstrations of object grasping.
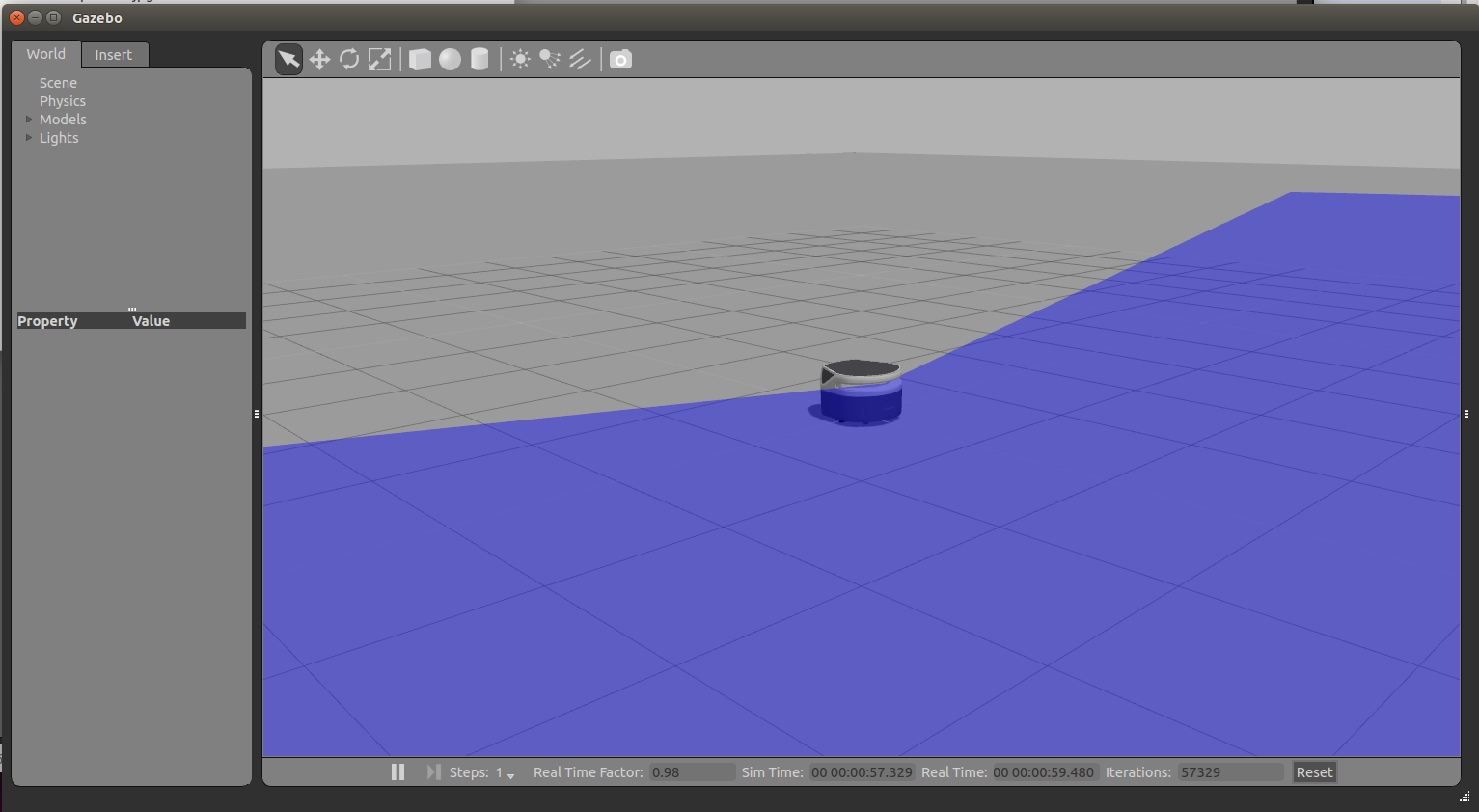
To start the simplest environment with Freight
$ roslaunch fetch_gazebo simulation.launch robot:=freight
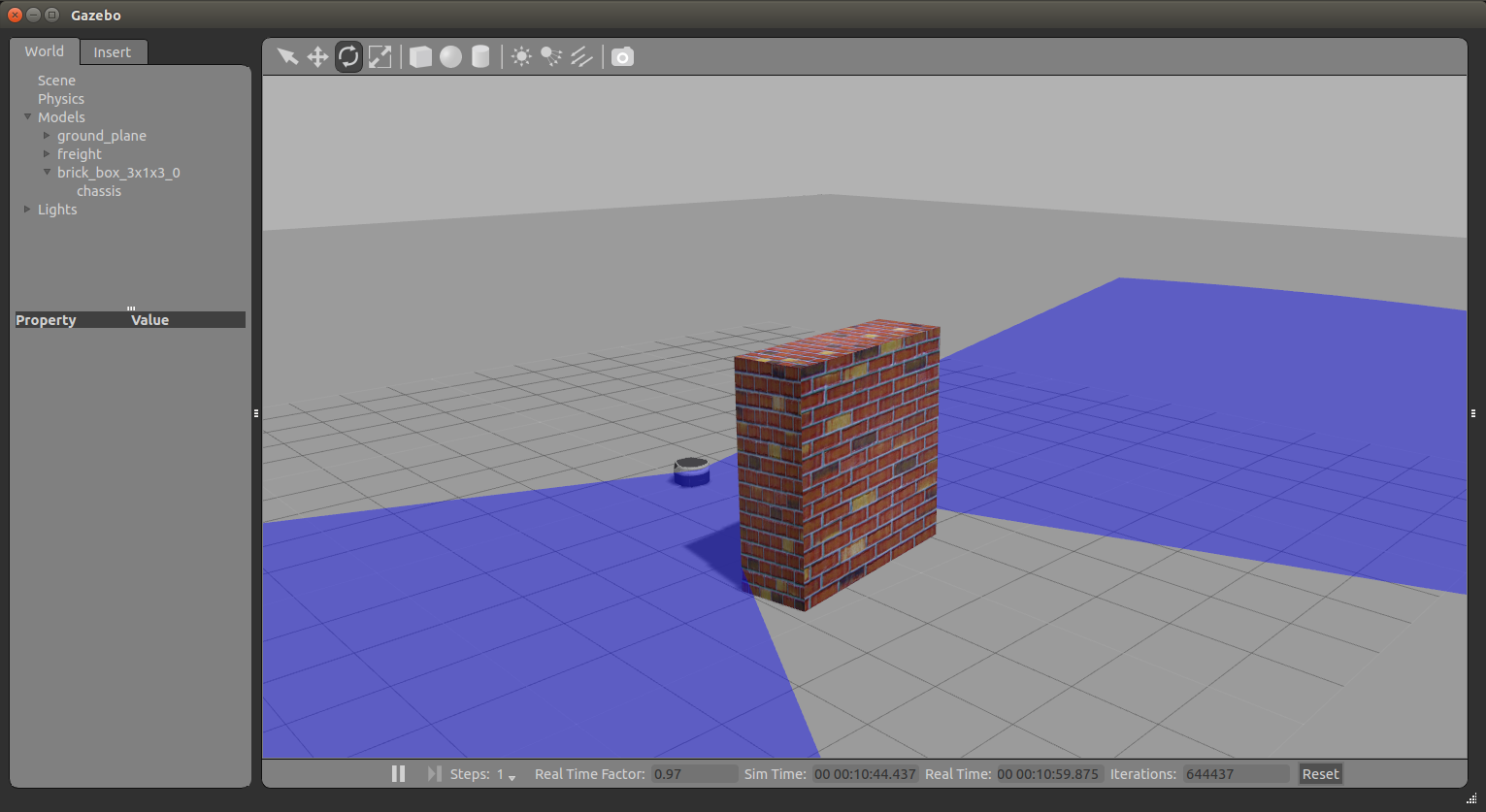
Adding a Brick wall to see how lidar scan works:
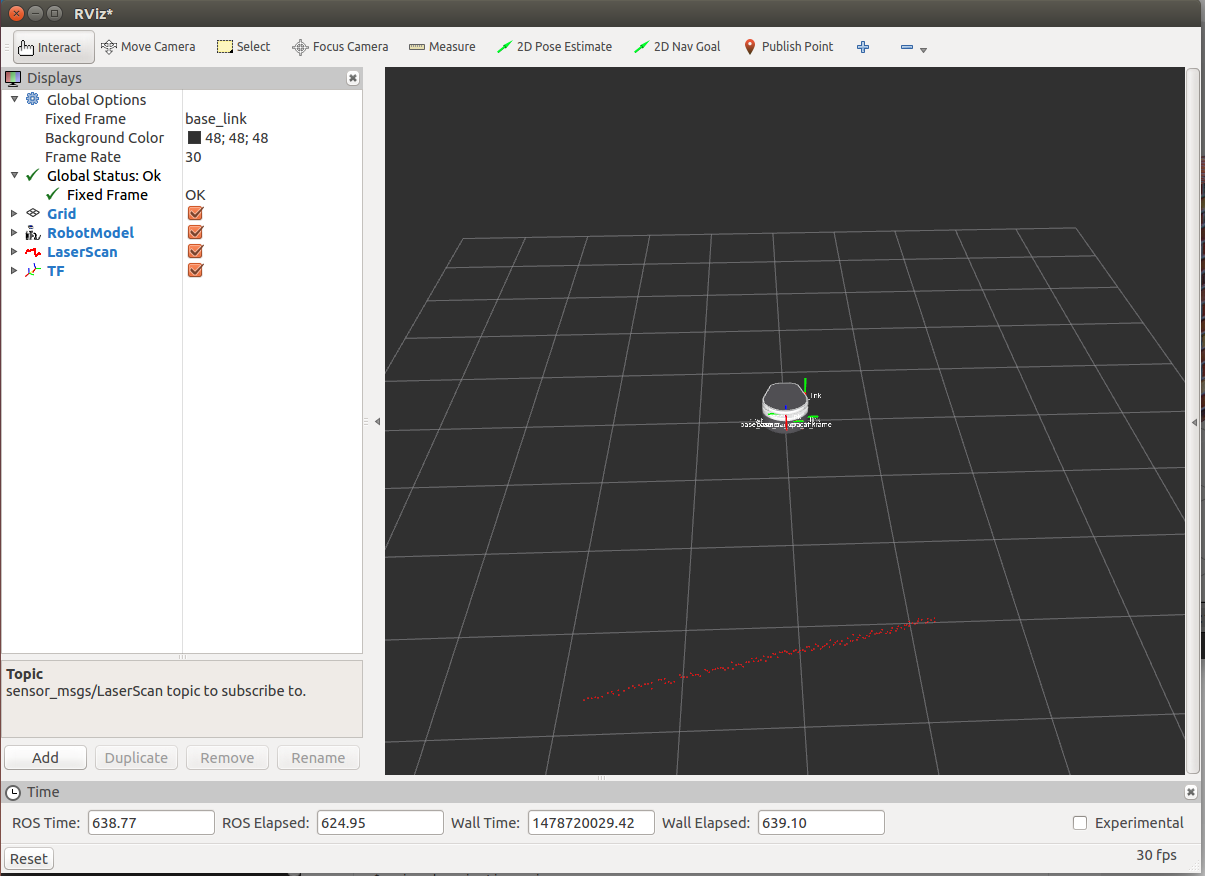
Visualizing with RVIZ
Even though Gazebo has a graphical visualization, RVIZ is still the preferred tool for interacting with your robot.
$ rosrun rviz rviz
Simulating a Freight robot in Gazebo的更多相关文章
- Simulating a Fetch robot in Gazebo
Installation Before installing the simulation environment, make sure your desktop is setup with a st ...
- run a Freight robot (1)
1. Freight robot The Fetch and Freight Research Edition Robots are indoor laboratory robots. Coordin ...
- run a Freight robot (2)
3. Network Setup Connecting Freight to a Monitor The easiest way to configure the wireless networki ...
- implement "slam_karto" package on a Freight robot
1. login ssh fetch@<robot ip or robot name> 2. set robot master modify .bashrc in robot's com ...
- run a Freight robot (3)
5.Logging In Once the robot is turned on and the robot is on the network, ssh into the computer of t ...
- Making my own Autonomous Robot in ROS / Gazebo, Day 1: Building the static model
Day 1: Setting up ROS: Indigo OS: Ubuntu 14.04 OS: Gazebo 7.0.0 Initialize the workspace To create t ...
- Gazebo機器人仿真學習探索筆記(七)连接ROS
中文稍后补充,先上官方原版教程.ROS Kinetic 搭配 Gazebo 7 附件----官方教程 Tutorial: ROS integration overview As of Gazebo 1 ...
- Gazebo Ros入门
教程代码 First step with gazebo and ros • setup a ROS workspace • create projects for your simulated rob ...
- getting started with building a ROS simulation platform for Deep Reinforcement Learning
Apparently, this ongoing work is to make a preparation for futural research on Deep Reinforcement Le ...
随机推荐
- ssh-keygen+ssh-copy-id 在linux下实现ssh无密码登录访问(转)
转自:http://blog.csdn.net/pennyliang/article/details/8556662 ssh-keygen+ssh-copy-id 在linux下实现ssh无密码登录访 ...
- Linux Centos 上一些常用的命令
1.查看端口被哪个进程占用 netstat -lnp | grep <端口号> 2.查看某个进程号详细信息 ps <进程号> 3.检查指定服务是否开启(例如 telnet) c ...
- eclipse字体颜色设置
修改编码:window-->perference--->General--> Configure.--> Configure.-->workspace修改编辑背景色:wi ...
- Apache服务器访问过慢分析及解决
起因:线上的一台服务器,最近总是出现 访问 很慢的情况发生,点击一个链接要2秒钟以上才能打开,按照我们对于访问人数的估计,服务器应该不至于响应这么慢,从而需要针对这个问题进行分析,来解决网站访问过慢. ...
- oracle 创建表空间用户
1.创建普通表空间和用户 //创建临时表空间create temporary tablespace oa_temptempfile 'D:\app\Administrator\oradata\orcl ...
- n阶乘 尾数0的个数
class Solution {public: int trailingZeroes(int n) { if(n<=0) return 0; int i=0; ...
- python day6 面向对象
把一个类变成具体的实例化的过程叫做类 实例化:把一个类变成一个具体对象的过程 __init__ 构造函数,在实例化时初始化数据 __init__方法的第一个参数永远是self,表示创建的实例本身,因 ...
- c#之线程池
using System; using System.Collections.Generic; using System.Linq; using System.Text; using System.I ...
- Andriod 按钮代码
package com.example.test1; import android.support.v7.app.ActionBarActivity; import android.os.Bundle ...
- 周赛-KIDx's Pagination 分类: 比赛 2015-08-02 08:23 7人阅读 评论(0) 收藏
KIDx's Pagination Time Limit: 2000/1000MS (Java/Others) Memory Limit: 128000/64000KB (Java/Others) S ...