小强 ROS 机器人教程
首先请您自行依据线标提示将小强接线连接好,完整结构如下两图所示:

小强是属于Turtlebot机器人。它由底盘、主机、Kinect相机(通过USB连接主机)组成,没有显示屏。如果要通过显示器查看主机的Linux影像,则需要通过HDMI转VGA线另外连接台式电脑显示器。

本机ip地址:查询本机ip地址。
通过ssh远程连接,其中xxx.xxx.xxx.xxx是小强的IP
ssh xiaoqiang@xxx.xxx.xxx.xxx
在小强机器人上按“ctrl+alt+t”调出命令窗口:
xiaoqiang@xiaoqiang-desktop:~$ ifconfig -a
eth12 Link encap:Ethernet HWaddr 00:e0:4c:68:01:87
UP BROADCAST MULTICAST MTU:1500 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
eth13 Link encap:Ethernet HWaddr 00:e0:4c:68:01:88
UP BROADCAST MULTICAST MTU:1500 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
lo Link encap:Local Loopback
inet addr:127.0.0.1 Mask:255.0.0.0
inet6 addr: ::1/128 Scope:Host
UP LOOPBACK RUNNING MTU:65536 Metric:1
RX packets:4379835 errors:0 dropped:0 overruns:0 frame:0
TX packets:4379835 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1
RX bytes:154070895214 (154.0 GB) TX bytes:154070895214 (154.0 GB)
wlan7 Link encap:Ethernet HWaddr e8:fc:af:9e:05:ed
inet addr:172.29.78.130 Bcast:172.29.255.255 Mask:255.255.0.0
inet6 addr: fe80::eafc:afff:fe9e:5ed/64 Scope:Link
UP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1
RX packets:31230 errors:0 dropped:0 overruns:0 frame:110951
TX packets:27909 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:10462279 (10.4 MB) TX bytes:5136459 (5.1 MB)
Interrupt:16
远程调用:
niu@niu-ThinkPad-T510:~$ ssh xiaoqiang@172.29.78.130
The authenticity of host '172.29.78.130 (172.29.78.130)' can't be established.
ECDSA key fingerprint is SHA256:1pDxKQ/7sw1WsI+KzJnn3OYQbyHMQAXTSNdC775jAgk.
Are you sure you want to continue connecting (yes/no)? yes
Warning: Permanently added '172.29.78.130' (ECDSA) to the list of known hosts.
xiaoqiang@172.29.78.130's password:
Welcome to Ubuntu 14.04.5 LTS (GNU/Linux 4.4.0-45-generic x86_64)
* Documentation: https://help.ubuntu.com/
Your Hardware Enablement Stack (HWE) is supported until April 2019.
Last login: Sat Dec 10 11:48:47 2016 from ubuntu
查询服务:
xiaoqiang@xiaoqiang-desktop:~$ rostopic list
/ORB_SLAM/Camera
/ORB_SLAM/Frame
/camera_node/camera_info
/camera_node/image_raw
/camera_node/image_raw/compressed
/camera_node/image_raw/compressed/parameter_descriptions
/camera_node/image_raw/compressed/parameter_updates
/camera_node/image_raw/compressedDepth
/camera_node/image_raw/compressedDepth/parameter_descriptions
/camera_node/image_raw/compressedDepth/parameter_updates
/camera_node/image_raw/theora
/camera_node/image_raw/theora/parameter_descriptions
/camera_node/image_raw/theora/parameter_updates
/cmd_vel
/globalMoveFlag
/imu_cal
/joint_states
/orb_scale/scaleStatus
/rosout
/rosout_agg
/system_monitor/report
/tf
/tf_static
/usb_cam/brightness
/xqserial_server/Odom
/xqserial_server/Pose2D
/xqserial_server/Power
/xqserial_server/StatusFlag
/xqserial_server/Twist
xiaoqiang@xiaoqiang-desktop:~$
查看系统状态:
xiaoqiang@xiaoqiang-desktop:~$ rostopic echo /system_monitor/report
imageStatus: True
odomStatus: True
orbStartStatus: False
orbInitStatus: False
orbScaleStatus: False
brightness: 0
power: 11.4527730942
其中 imageStatus 表示摄像头是否工作正常。odomStatus 表示底层驱动时候工作正常。Orb相关的三个变量是视觉导航相关的状态,可以不用管(如果对这方面感兴趣可以在论坛里进
行交流)。brightness 是摄像头的亮度,power 是当前电池的电压值,如果无法读取则是 0.
远程遥控:
通过 ssh 进行连接
ssh xiaoqiang@xxx.xxx.xxx.xxx
启动遥控程序
rosrun nav_test control.py
现在就可以通过方向键来控制小强的移动了。空格键是停止。Ctrl + C 退出程序。
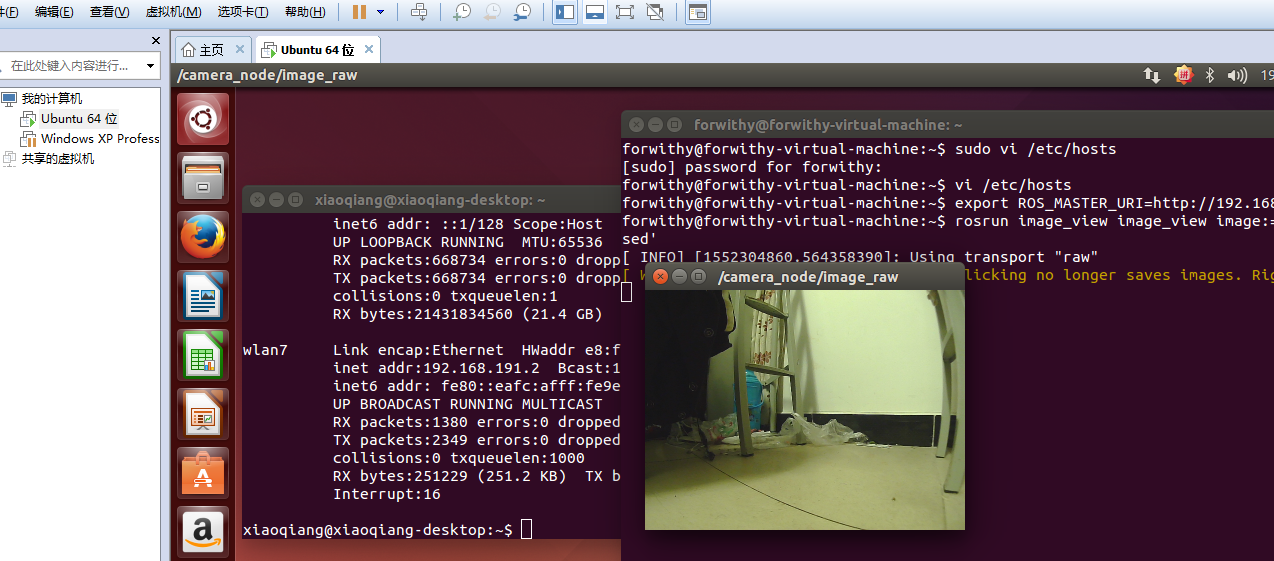
视频传输:
修改hosts文件:https://zhidao.baidu.com/question/201310150745872645.html http://os.51cto.com/art/200803/68170.htm
rosrun image_view image_view image:=/camera_node/image_raw_image_transport:=compressed
niu@niu-ThinkPad-T510:~$ export ROS_MASTER_URI=http://172.29.78.130:11311
niu@niu-ThinkPad-T510:~$ rosrun image_view image_view image:=/camera_node/image_raw image_transport:='compressed'
init done
[ INFO] [1482102718.080234054]: Using transport "raw"
帮助信息:http://blog.csdn.net/crazyquhezheng/article/details/50324583
1.配置小强网络
http://community.bwbot.org/topic/61/%E5%B0%8F%E5%BC%BA%E7%9A%84%E8%BF%9C%E7%A8%8B%E5%8D%8F%E5%8A%A9%E5%8A%9F%E8%83%BD
为什么一定要是Linux呢,因为ROS只有Linux版,所以必须是Linux,而且Linux是开源的系统,免费而且开源,可以改造,轻便,适合于工业制造,而且有很多的开源代码,当然很多开源代码是跨平台的,通过CMake也可以用于Windows、Mac、Android等。
为什么一定要将图像传输到服务器端,在客户端也可以处理啊,的确是这样,但是服务器端可以操纵小车的行走,这个是在客户端所不能完成的,所以这个控制是必须由服务器端完成的。
小强 ROS 机器人教程的更多相关文章
- TIAGo ROS模拟教程2 - 自主机器人导航
TIAGo ROS Simulation Tutorial 2 – Autonomous robot navigation TIAGo ROS模拟教程2 - 自主机器人导航 发表于 12月 23,20 ...
- ros机器人开发概述
1. ROS项目开发流程? 参照古月大神写的ROS探索总结系列:http://blog.exbot.net/archives/619 具体项目设计可看看<程序员>杂志的最新一篇 ...
- Learning ROS for Robotics Programming - Second Edition(《学习ROS机器人编程-第二版》)
Learning ROS for Robotics Programming - Second Edition <学习ROS机器人编程-第二版> ----Your one-stop guid ...
- ROS机器人程序设计-学习小结-
ROS官网 |易科 |虞坤林 |古月居 |ROSClub 学习ROS相关书籍推荐:http://blog.csdn.net/zhangrelay/article/details/52244746 RO ...
- ROS机器人程序设计(原书第2版)补充资料 (拾) 第十章 使用MoveIt!
ROS机器人程序设计(原书第2版)补充资料 (拾) 第十章 使用MoveIt! 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. MoveIt ...
- ROS机器人程序设计(原书第2版)补充资料 (零) 源代码、资料和印刷错误修订等 2017年01月01日更新
ROS机器人程序设计(原书第2版)补充资料 (零) 源代码等 ROS官网 版)部分内容修订 页:第1行,删去$ 页:第6行,float64 y 前面加一个空格 页:中间创建主题:下面程序不用换行,(& ...
- ROS机器人程序设计(原书第2版)补充资料 (捌) 第八章 导航功能包集入门 navigation
ROS机器人程序设计(原书第2版)补充资料 (捌) 第八章 导航功能包集入门 navigation 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中 ...
- ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse
ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse 书中,大部分出现hydro的地方,直接替换为indigo或ja ...
- ROS机器人程序设计(原书第2版)补充资料 (肆) 第四章 在ROS下使用传感器和执行器
ROS机器人程序设计(原书第2版)补充资料 (肆) 第四章 在ROS使用传感器和执行器 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 第四 ...
随机推荐
- storm集群相关资料
1. Storm集群组件 Storm集群中包含两类节点:主控节点(Master Node)和工作节点(Work Node).其分别对应的角色如下: 主控节点(Master Node)上运行一个被称为N ...
- asp.net core in centos
CentOS 7部署ASP.NET Core应用程序 看了几篇大牛写的关于Linux部署ASP.NET Core程序的文章,今天来实战演练一下.2017年最后一个工作日,提前预祝大家伙元旦快乐.不 ...
- Java 枚举那点事
目录 最近有需求,想存自定义的枚举值,比如 HOTLINE("Hotline") 我想存 Hotline 于是研究了一下Java的枚举问题 如下数据库的Entity (贫血模型哈) ...
- 迷你MVVM框架 avalonjs 学习教程16、过滤器
avalon的过滤器是参考自angular与rivets.它也被称做管道文本过滤器,它的处理对象只能是文本(字符串),它只能用在文本绑定中,并且只能是双花括号形式.下面是各大家的过滤器比较: rive ...
- Delphi编程实现是否开启“平滑屏幕字体边缘“
在Windows高级设置中的视觉效果中可以设置是否开启“平滑屏幕字休边缘”,可以通过编程的方式来实现: if SystemParametersInfo(SPI_SETFONTSMOOTHING, 1, ...
- ID3、C4.5和cart算法比较(转)
转自:https://www.zhihu.com/question/27205203
- centos7 莫名重起的问题
ausearch -i -m system_boot,system_shutdown | tail -4----type=SYSTEM_BOOT msg=audit(2018年05月10日 07:45 ...
- Spring @Configuration
下面是一个典型的spring配置文件(application-config.xml): <beans> <bean id="orderService" class ...
- Ubuntu中解决机箱前置耳机没声音
Ubuntu中解决机箱前置耳机没声音 安装pavucontrol软件: sudo apt-get install pavucontrol 然后直接运行pavucontrol打开软件: 将输出设备设置为 ...
- jQuery对象转换为DOM对象(转)
jQuery对象转换为dom对象 只有jQuery对象才能调用jQuery类库的各种函数,同样有些dom对象的属性和方法在jQuery上也是无法调用的,不过基本上jQuery类库提供的函数包含了所有的 ...