AI佳作解读系列(五) - 目标检测二十年技术综述

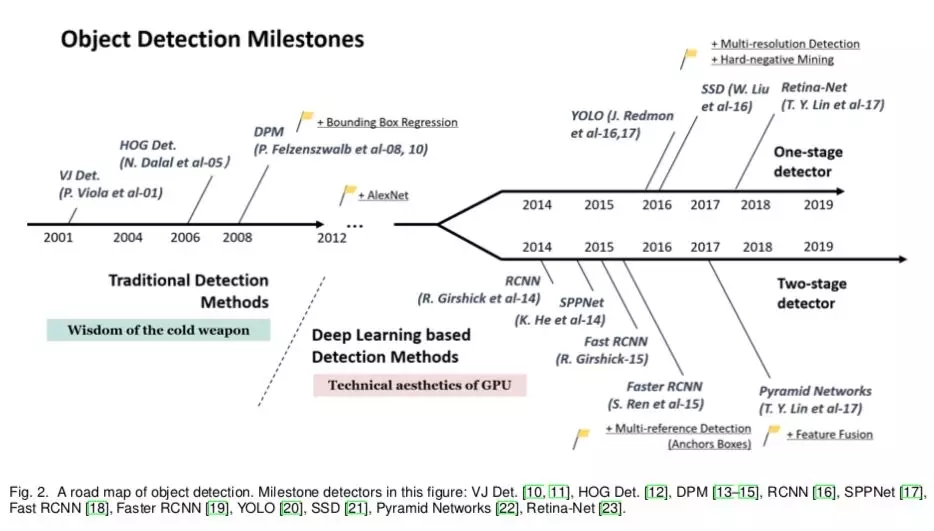
- 目标检测路线图

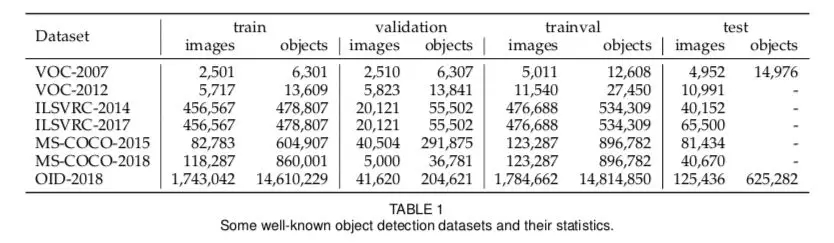
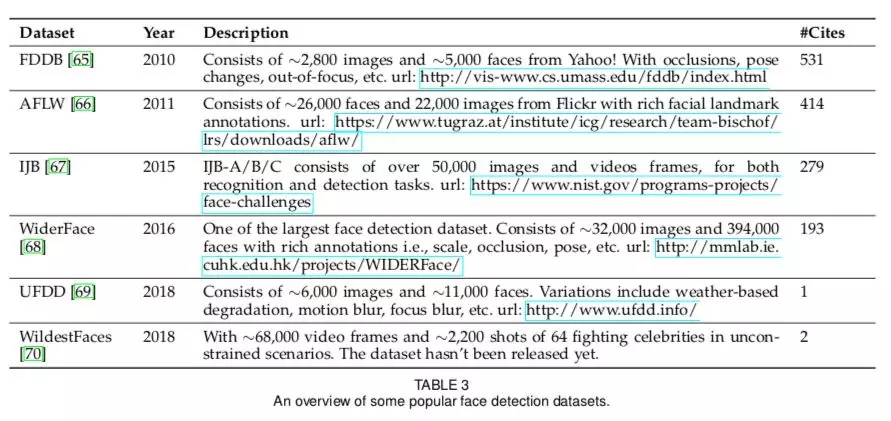
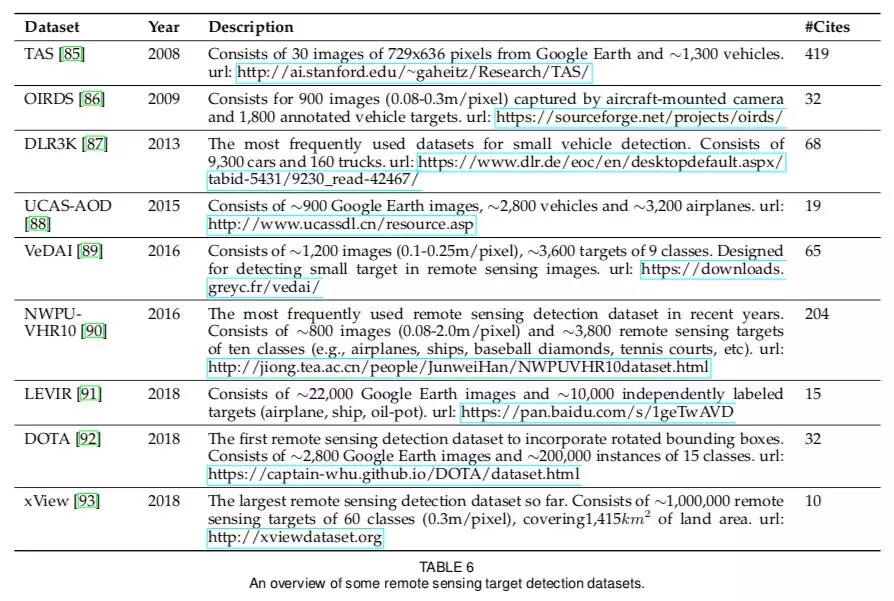
- 目标检测数据集




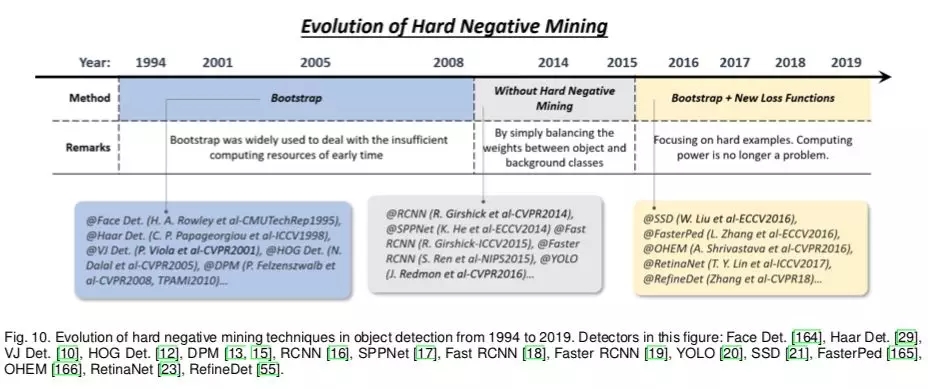
- 目标检测技术演进


- 目标检测计算加速

- 数值计算层次(如积分图、矢量量化等)
- 检测引擎层次(网络剪枝与量化、轻量级网络设计等)
- 检测流程层次(特征图共享、分类器加速、级连检测等)

- 目标检测进展
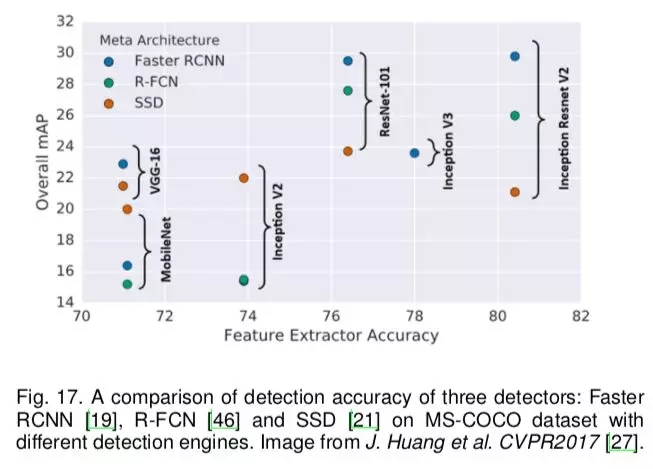
- 更好地引擎(engine):作者将深度学习目标检测网络的骨干网称为其引擎。改进目标检测的一个直接思路就是使用更加先进的骨干网。如下图(相同算法用相同颜色的圆点表示,使用相同引擎的算法结果用一个大括号连接,我们可以轻易看出,使用不同的引擎对最终精度的影响更大):
- 使用更好的特征:1)特征融合;2)学习大感受野的高分辨率特征
- 超越滑动窗口:不再是局限于候选区域再分类的模式。作者提到两种新模式:1)子区域搜索 sub-region search。将目标检测看为从初始网格到最终ground truth box的路径规划过程。2)关键点定位。将目标检测看为特定语义点定位的过程。比如:ECCV18 Oral | CornerNet目标检测开启预测“边界框”到预测“点对”的新思路Grid R-CNN解读:商汤目标检测算法
- 目标定位改进:1)包围框提精。2)改进loss函数用于较精确定位。比如:CVPR 2019 | 旷视提出新型目标检测损失函数:定位更精准
- 检测与分割一起进行:分割可以帮助目标检测提高类别识别的精度、获得更好地目标定位、潜入更加丰富的上下文。分割的网络可以作为目标检测的提取网络,也可以作为多任务学习的损失函数,用以改进目标检测。52CV曾经报道过一篇文章甚至分割完全可以用来替换检测:目标检测:Segmentation is All You Need ?
- 旋转和尺度变化鲁棒的目标检测:针对旋转变化鲁棒改进方向:1)旋转不变损失函数;2)旋转校正;3)Rotation RoI Pooling。针对尺度变化鲁棒的改进:1)尺度自适应训练;2)尺度自适应检测。
- Training from Scratch:不使用预训练模型,从头开始训练目标检测网络。比如:CVPR 2019 | 京东AI研究院提出ScratchDet,加强对小目标的检测,代码将开源。
- 对抗训练:比如有研究表明,GAN可以用来改进小目标的检测。
- 弱监督的目标检测:不使用包围框标注,而仅使用图像级的目标标注的算法。减少标注成本。扩大训练集。
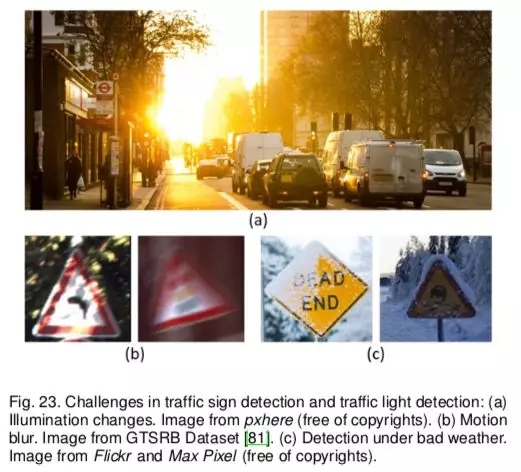
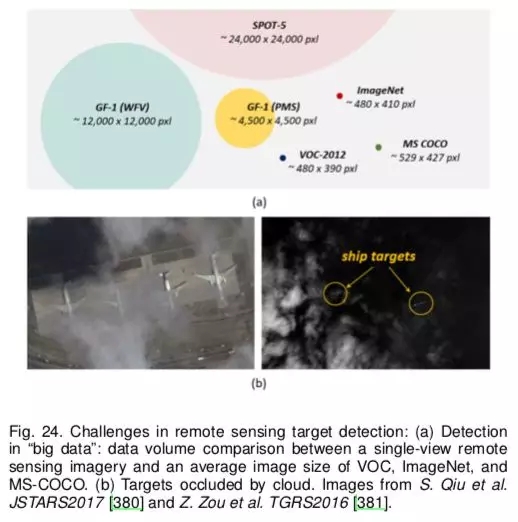
- 目标检测应用

- 目标检测的未来方向
- 轻量级目标检测算法;
- 用AutoML设计目标检测算法,比如:Google CVPR 2019成果!用神经架构搜索实现更好的目标检测
- 域适应(domain adaptation)改进目标检测;
- 弱监督的目标检测;
- 小目标检测;
- 视频目标检测
- 融合其他传感器信息的目标检测。
AI佳作解读系列(五) - 目标检测二十年技术综述的更多相关文章
- AI佳作解读系列(二)——目标检测AI算法集杂谈:R-CNN,faster R-CNN,yolo,SSD,yoloV2,yoloV3
1 引言 深度学习目前已经应用到了各个领域,应用场景大体分为三类:物体识别,目标检测,自然语言处理.本文着重与分析目标检测领域的深度学习方法,对其中的经典模型框架进行深入分析. 目标检测可以理解为是物 ...
- AI佳作解读系列(六) - 生成对抗网络(GAN)综述精华
注:本文来自机器之心的PaperWeekly系列:万字综述之生成对抗网络(GAN),如有侵权,请联系删除,谢谢! 前阵子学习 GAN 的过程发现现在的 GAN 综述文章大都是 2016 年 Ian G ...
- AI佳作解读系列(一)——深度学习模型训练痛点及解决方法
1 模型训练基本步骤 进入了AI领域,学习了手写字识别等几个demo后,就会发现深度学习模型训练是十分关键和有挑战性的.选定了网络结构后,深度学习训练过程基本大同小异,一般分为如下几个步骤 定义算法公 ...
- AI佳作解读系列(四)——数据增强篇
前言 在深度学习的应用过程中,数据的重要性不言而喻.继上篇介绍了数据合成(个人认为其在某种程度上可被看成一种数据增强方法)这个主题后,本篇聚焦于数据增强来介绍几篇杰作! (1)NanoNets : H ...
- AI佳作解读系列(三)——深度学习中的合成数据研究
Below are some investigation resources for synthetic datasets: 1. Synthetic datasets vs. real images ...
- CVPR2019目标检测方法进展综述
CVPR2019目标检测方法进展综述 置顶 2019年03月20日 14:14:04 SIGAI_csdn 阅读数 5869更多 分类专栏: 机器学习 人工智能 AI SIGAI 版权声明:本文为 ...
- Google AI推出新的大规模目标检测挑战赛
来源 | Towards Data Science 整理 | 磐石 就在几天前,Google AI在Kaggle上推出了一项名为Open Images Challenge的大规模目标检测竞赛.当今计算 ...
- Alamofire源码解读系列(五)之结果封装(Result)
本篇讲解Result的封装 前言 有时候,我们会根据现实中的事物来对程序中的某个业务关系进行抽象,这句话很难理解.在Alamofire中,使用Response来描述请求后的结果.我们都知道Alamof ...
- deeplearning.ai 卷积神经网络 Week 3 目标检测 听课笔记
本周的主题是对象检测(object detection):不但需要检测出物体(image classification),还要能定位出在图片的具体位置(classification with loca ...
随机推荐
- jquery页面多个倒计时效果
<div class="timeBox" data-times="2019/06/30,23:59:59"> 距结束 <span class= ...
- PAT1059Prime Factors
1059 Prime Factors (25分) Given any positive integer N, you are supposed to find all of its prime f ...
- Vue基础入门笔记
不是面向DOM进行编程,而是面向数据去编程.当数据发生改变,页面就会随着改变. 属性绑定(v-bind)和双向数据绑定(v-model) 模板指令(v-bind:)后面跟的内容不再是字符串而是: js ...
- 2019/2/18 Test
图论模拟 [简述情况]: \(110/400\) \(20 \leq rank\) \(AC:1\) 有思路但未\(AC:0\) 无思路\(:3\) 题目 简述 \(LUOGU4304\) 二分图最大 ...
- piplinedb 团队加入confluen
这个消息对于使用pipelinedb 的人来说,可能有点不好,因为官方已经明确说明了,pipelinedb 截止到1.0 版本,将不再维护了, 基本就要靠社区了,但是pipelinedb 团队还是比较 ...
- 洛谷 P1613 跑路 题解
P1613 跑路 题目描述 小A的工作不仅繁琐,更有苛刻的规定,要求小A每天早上在6:00之前到达公司,否则这个月工资清零.可是小A偏偏又有赖床的坏毛病.于是为了保住自己的工资,小A买了一个十分牛B的 ...
- LibreOJ #108. 多项式乘法
二次联通门 : LibreOJ #108. 多项式乘法 /* LibreOJ #108. 多项式乘法 FFT板子题 不行啊...跑的还是慢 应该找个机会学一学由乃dalao的fft 或者是毛爷爷的ff ...
- jmeter五种提取器 之 正则表达式
提取器的作用是把响应结果值获取到,用于后续的请求参数中 () :封装了待返回的匹配字符串. . :匹配任何单个字符串. + :一次或多次. ? :不要太贪婪,在找到第一个匹配项后停止. * :匹配 ...
- andriod studio命名规范
标识符命名法标识符命名法最要有四种: 1 驼峰(Camel)命名法:又称小驼峰命名法,除首单词外,其余所有单词的第一个字母大写. 2 帕斯卡(pascal)命名法:又称大驼峰命名法,所有单词的第一个字 ...
- Linux 搜索查找类指令
一.find 指令 find 指令将从指定目录向下递归遍历其各子目录,将满足条件的文件或者目录显示在终端. 基本语法 find [搜索范围] [选项] 选项说明 -name ...