PCL 3维点云的模板匹配
Doc 来自PCL官方文档 http://www.pointclouds.org/documentation/tutorials/template_alignment.php#template-alignment
#include <limits>
#include <fstream>
#include <vector>
#include <Eigen/Core>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/io/pcd_io.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/filters/passthrough.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/features/normal_3d.h>
#include <pcl/features/fpfh.h>
#include <pcl/registration/ia_ransac.h> class FeatureCloud
{
public:
// A bit of shorthand
typedef pcl::PointCloud<pcl::PointXYZ> PointCloud;
typedef pcl::PointCloud<pcl::Normal> SurfaceNormals;
typedef pcl::PointCloud<pcl::FPFHSignature33> LocalFeatures;
typedef pcl::search::KdTree<pcl::PointXYZ> SearchMethod; FeatureCloud () :
search_method_xyz_ (new SearchMethod),
normal_radius_ (0.02f),
feature_radius_ (0.02f)
{} ~FeatureCloud () {} // Process the given cloud
void
setInputCloud (PointCloud::Ptr xyz)
{
xyz_ = xyz;
processInput ();
} // Load and process the cloud in the given PCD file
void
loadInputCloud (const std::string &pcd_file)
{
xyz_ = PointCloud::Ptr (new PointCloud);
pcl::io::loadPCDFile (pcd_file, *xyz_);
processInput ();
} // Get a pointer to the cloud 3D points
PointCloud::Ptr
getPointCloud () const
{
return (xyz_);
} // Get a pointer to the cloud of 3D surface normals
SurfaceNormals::Ptr
getSurfaceNormals () const
{
return (normals_);
} // Get a pointer to the cloud of feature descriptors
LocalFeatures::Ptr
getLocalFeatures () const
{
return (features_);
} protected:
// Compute the surface normals and local features
void
processInput ()
{
computeSurfaceNormals ();
computeLocalFeatures ();
} // Compute the surface normals
void
computeSurfaceNormals ()
{
normals_ = SurfaceNormals::Ptr (new SurfaceNormals); pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> norm_est;
norm_est.setInputCloud (xyz_);
norm_est.setSearchMethod (search_method_xyz_);
norm_est.setRadiusSearch (normal_radius_);
norm_est.compute (*normals_);
} // Compute the local feature descriptors
void
computeLocalFeatures ()
{
features_ = LocalFeatures::Ptr (new LocalFeatures); pcl::FPFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::FPFHSignature33> fpfh_est;
fpfh_est.setInputCloud (xyz_);
fpfh_est.setInputNormals (normals_);
fpfh_est.setSearchMethod (search_method_xyz_);
fpfh_est.setRadiusSearch (feature_radius_);
fpfh_est.compute (*features_);
} private:
// Point cloud data
PointCloud::Ptr xyz_;
SurfaceNormals::Ptr normals_;
LocalFeatures::Ptr features_;
SearchMethod::Ptr search_method_xyz_; // Parameters
float normal_radius_;
float feature_radius_;
}; class TemplateAlignment
{
public: // A struct for storing alignment results
struct Result
{
float fitness_score;
Eigen::Matrix4f final_transformation;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
}; TemplateAlignment () :
min_sample_distance_ (0.05f),
max_correspondence_distance_ (0.01f*0.01f),
nr_iterations_ (500)
{
// Initialize the parameters in the Sample Consensus Initial Alignment (SAC-IA) algorithm
sac_ia_.setMinSampleDistance (min_sample_distance_);
sac_ia_.setMaxCorrespondenceDistance (max_correspondence_distance_);
sac_ia_.setMaximumIterations (nr_iterations_);
} ~TemplateAlignment () {} // Set the given cloud as the target to which the templates will be aligned
void
setTargetCloud (FeatureCloud &target_cloud)
{
target_ = target_cloud;
sac_ia_.setInputTarget (target_cloud.getPointCloud ());
sac_ia_.setTargetFeatures (target_cloud.getLocalFeatures ());
} // Add the given cloud to the list of template clouds
void
addTemplateCloud (FeatureCloud &template_cloud)
{
templates_.push_back (template_cloud);
} // Align the given template cloud to the target specified by setTargetCloud ()
void
align (FeatureCloud &template_cloud, TemplateAlignment::Result &result)
{
sac_ia_.setInputCloud (template_cloud.getPointCloud ());
sac_ia_.setSourceFeatures (template_cloud.getLocalFeatures ()); pcl::PointCloud<pcl::PointXYZ> registration_output;
sac_ia_.align (registration_output); result.fitness_score = (float) sac_ia_.getFitnessScore (max_correspondence_distance_);
result.final_transformation = sac_ia_.getFinalTransformation ();
} // Align all of template clouds set by addTemplateCloud to the target specified by setTargetCloud ()
void
alignAll (std::vector<TemplateAlignment::Result, Eigen::aligned_allocator<Result> > &results)
{
results.resize (templates_.size ());
for (size_t i = 0; i < templates_.size (); ++i)
{
align (templates_[i], results[i]);
}
} // Align all of template clouds to the target cloud to find the one with best alignment score
int
findBestAlignment (TemplateAlignment::Result &result)
{
// Align all of the templates to the target cloud
std::vector<Result, Eigen::aligned_allocator<Result> > results;
alignAll (results); // Find the template with the best (lowest) fitness score
float lowest_score = std::numeric_limits<float>::infinity ();
int best_template = 0;
for (size_t i = 0; i < results.size (); ++i)
{
const Result &r = results[i];
if (r.fitness_score < lowest_score)
{
lowest_score = r.fitness_score;
best_template = (int) i;
}
} // Output the best alignment
result = results[best_template];
return (best_template);
} private:
// A list of template clouds and the target to which they will be aligned
std::vector<FeatureCloud> templates_;
FeatureCloud target_; // The Sample Consensus Initial Alignment (SAC-IA) registration routine and its parameters
pcl::SampleConsensusInitialAlignment<pcl::PointXYZ, pcl::PointXYZ, pcl::FPFHSignature33> sac_ia_;
float min_sample_distance_;
float max_correspondence_distance_;
int nr_iterations_;
}; // Align a collection of object templates to a sample point cloud
int
main (int argc, char **argv)
{
if (argc < 3)
{
printf ("No target PCD file given!\n");
return (-1);
} // Load the object templates specified in the object_templates.txt file
std::vector<FeatureCloud> object_templates;
std::ifstream input_stream (argv[1]);
object_templates.resize (0);
std::string pcd_filename;
while (input_stream.good ())
{
std::getline (input_stream, pcd_filename);
if (pcd_filename.empty () || pcd_filename.at (0) == '#') // Skip blank lines or comments
continue; FeatureCloud template_cloud;
template_cloud.loadInputCloud (pcd_filename);
object_templates.push_back (template_cloud);
}
input_stream.close (); // Load the target cloud PCD file
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile (argv[2], *cloud); // Preprocess the cloud by...
// ...removing distant points
const float depth_limit = 1.0;
pcl::PassThrough<pcl::PointXYZ> pass;
pass.setInputCloud (cloud);
pass.setFilterFieldName ("z");
pass.setFilterLimits (0, depth_limit);
pass.filter (*cloud); // ... and downsampling the point cloud
const float voxel_grid_size = 0.005f;
pcl::VoxelGrid<pcl::PointXYZ> vox_grid;
vox_grid.setInputCloud (cloud);
vox_grid.setLeafSize (voxel_grid_size, voxel_grid_size, voxel_grid_size);
//vox_grid.filter (*cloud); // Please see this http://www.pcl-developers.org/Possible-problem-in-new-VoxelGrid-implementation-from-PCL-1-5-0-td5490361.html
pcl::PointCloud<pcl::PointXYZ>::Ptr tempCloud (new pcl::PointCloud<pcl::PointXYZ>);
vox_grid.filter (*tempCloud);
cloud = tempCloud; // Assign to the target FeatureCloud
FeatureCloud target_cloud;
target_cloud.setInputCloud (cloud); // Set the TemplateAlignment inputs
TemplateAlignment template_align;
for (size_t i = 0; i < object_templates.size (); ++i)
{
template_align.addTemplateCloud (object_templates[i]);
}
template_align.setTargetCloud (target_cloud); // Find the best template alignment
TemplateAlignment::Result best_alignment;
int best_index = template_align.findBestAlignment (best_alignment);
const FeatureCloud &best_template = object_templates[best_index]; // Print the alignment fitness score (values less than 0.00002 are good)
printf ("Best fitness score: %f\n", best_alignment.fitness_score); // Print the rotation matrix and translation vector
Eigen::Matrix3f rotation = best_alignment.final_transformation.block<3,3>(0, 0);
Eigen::Vector3f translation = best_alignment.final_transformation.block<3,1>(0, 3); printf ("\n");
printf (" | %6.3f %6.3f %6.3f | \n", rotation (0,0), rotation (0,1), rotation (0,2));
printf ("R = | %6.3f %6.3f %6.3f | \n", rotation (1,0), rotation (1,1), rotation (1,2));
printf (" | %6.3f %6.3f %6.3f | \n", rotation (2,0), rotation (2,1), rotation (2,2));
printf ("\n");
printf ("t = < %0.3f, %0.3f, %0.3f >\n", translation (0), translation (1), translation (2)); // Save the aligned template for visualization
pcl::PointCloud<pcl::PointXYZ> transformed_cloud;
pcl::transformPointCloud (*best_template.getPointCloud (), transformed_cloud, best_alignment.final_transformation);
pcl::io::savePCDFileBinary ("output.pcd", transformed_cloud); return (0);
}
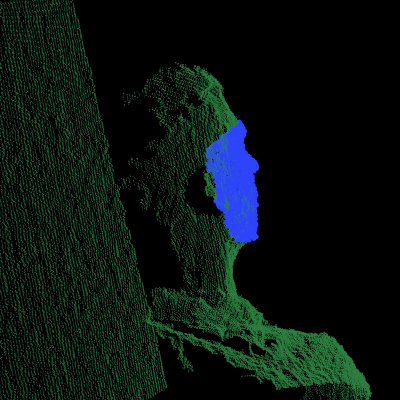
结果查看
pcl_viewer_debug.exe person.pcd output.pcd
PCL 3维点云的模板匹配的更多相关文章
- Halcon编程-基于形状特征的模板匹配
halcon软件最高效的一个方面在于模板匹配,号称可以快速进行柔性模板匹配,能够非常方便的用于缺陷检测.目标定位.下面以一个简单的例子说明基于形状特征的模板匹配. 为了在右图中,定位图中的三 ...
- 模式识别之ocr项目---(模板匹配&BP神经网络训练)
摘 要 在MATLAB环境下利用USB摄像头采集字符图像,读取一帧保存为图像,然后对读取保存的字符图像,灰度化,二值化,在此基础上做倾斜矫正,对矫正的图像进行滤波平滑处理,然后对字符区域进行提取分割出 ...
- 字符识别OCR研究一(模板匹配&BP神经网络训练)
摘 要 在MATLAB环境下利用USB摄像头採集字符图像.读取一帧保存为图像.然后对读取保存的字符图像,灰度化.二值化,在此基础上做倾斜矫正.对矫正的图像进行滤波平滑处理,然后对字符区域进行提取切割出 ...
- OpenCV中的模板匹配/Filter2d
1.模板匹配 模板匹配是在图像中寻找目标的方法之一.Come On, Boy.我们一起来看看模板匹配到底是怎么回事. 参考链接:http://www.opencv.org.cn/opencvdoc/2 ...
- OpenCV笔记(3)(Canny边缘检测、高斯金字塔、拉普拉斯金字塔、图像轮廓、模板匹配)
一.Canny边缘检测 Canny边缘检测是一系列方法综合的结果.其中主要包含以下步骤: 1.使用高斯滤波器,平滑图像,滤除噪声. 2.计算图像中每个像素点的梯度强度和方向. 3.应用非极大值抑制(N ...
- 使用OpenCV&&C++进行模板匹配.
一:课程介绍 1.1:学习目标 学会用imread载入图像,和imshow输出图像. 用nameWindow创建窗口,用createTrackbar加入滚动条和其回调函数的写法. 熟悉OpenCV函数 ...
- halcon三种模板匹配方法
halcon有三种模板匹配方法:即Component-Based.Gray-Value-Based.Shaped_based,分别是基于组件(或成分.元素)的匹配,基于灰度值的匹配和基于形状的匹配,此 ...
- opencv 模板匹配与滑动窗口(单匹配) (多匹配)
1单匹配: 测试图片: code: #include <opencv\cv.h> #include <opencv\highgui.h> #include <open ...
- opencv 在工业中的应用:模板匹配
模板匹配在工业中经常有两个用途,一模板匹配进行产品定位,二根据匹配度来判断是OK的产品还是NG的产品.我用OPENCV做了个模板匹配定位的DEMO. (1)点击打开图像按钮打开一幅图像 (2)点击定义 ...
随机推荐
- java日常知识点积累
java类型中的普通非static方法 示例代码: package com.lvzhi; /** * Created by lvzhi on 2017/9/3 */ public class MyTh ...
- iOS-----使用GCD实现多线程
使用GCD实现多线程 GCD的两个核心概念如下: 队列 队列负责管理开发者提交的任务,GCD队列始终以FIFO(先进先出)的方式来处理任务---但 由于任务的执行时间并不相同,因此先处理的任务并一定先 ...
- pandas groupby 使用
so useful~ refer to: http://kekefund.com/2016/06/17/pandas-groupby/
- 用Navicat复制数据库到本地(导入.sql文件运行)
今天装数据库的机子没开,项目运行不了,于是还是决定在自己电脑上装数据库,由于新学数据库操作,记录一下 一.转储sql文件 右键点击数据库,转储sql文件,点击结构和数据 存放在本地,开始转储 转储完成 ...
- Android开发入门
教我徒弟Android开发入门(一) 教我徒弟Android开发入门(二) 教我徒弟Android开发入门(三) 出处:http://www.cnblogs.com/kexing/tag/Androi ...
- Android SDK无法更新的问题解决办法
问题: SSL hostname in certificate didn't matchhostname in certificate didn't match: <dl-ssl.google. ...
- java并发之原子性、可见性、有序性
链接:https://blog.csdn.net/gongpulin/article/details/51211616
- GPU 服务器环境安装中一些基础note
GPU 服务器环境安装中一些基础note GPU 服务器: 添加组,用户,并为之新建主目录. c302@c302-dl:~$ sudo addgroup testgroup Adding group ...
- 智能家居入门DIY——【七、添加一个LCD12864吧】
今天加了一个LCD12864,IC看说明上是ST7567,结果一顿U8g2,发现两个问题: 1.买的时候不知道是卖家写的我理解错了还是怎么了,反正是不出汉字的. 2.U8g2太大了…………占了uno的 ...
- Django将.csv文件(excel文件)显示到网页上
今天,我成功将项目要导入的测试数据导入并呈现了,虽然还不是很完美,但我之后仍会继续改进. 1.首先在主页面上加一个超链接按钮: 其它的不需要管,其它是我的另一个项目,没什么大用的 2.之后配置URL: ...